Súťaže sa zúčastnili traja súťažiaci so štyrmi robotmi:
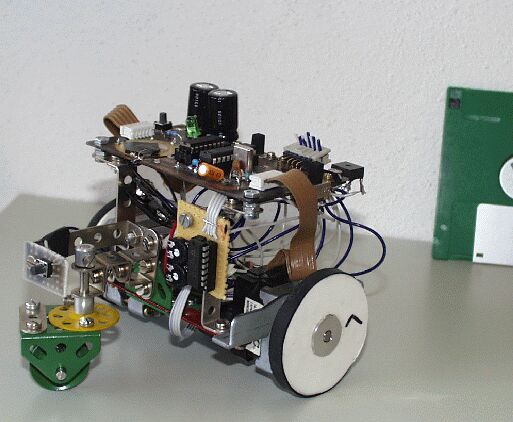
Autor: Albert Diósi
Mobot I. je trojkolesový vozík s dvoma nezávisle poháňanými kolesami a jedným voľne otáčavým podporným kolieskom. Konštrukcia vychádza z pohonu, ktorý zabezpečujú dva krokové motory z disketovej mechaniky.
Riadenie zabezpečuje mikroprocesor Atmel 2051 doplnený výkonovými spínačmi ULN2008.
Senzorická časť pozostáva z fototranzistorov KPX81, ktoré sú osvetľované červenými fotodiódami. Trimre umožňujú nastaviť komparačné úrovne.
Napájanie zabezpečujú bežné tužkové akumulátory 1,5V v celkovom počte 6ks.
Autor: Albert Diósi
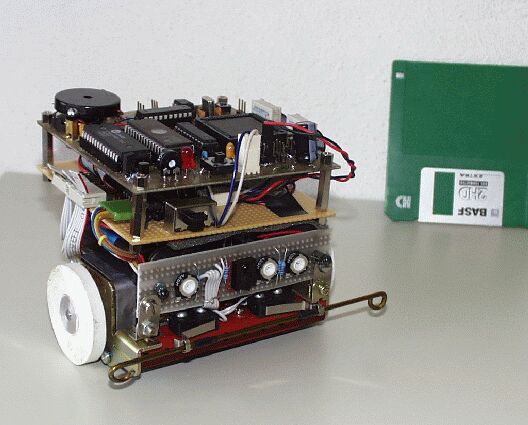
Mobot II. je mobilný robot, ktorý vychádza z osvedčenej konštrukcie Mobot I. Trojkolesový vozík s dvoma nezávisle poháňanými kolesami a jedným voľne otáčavým podporným kolieskom má robustnejšiu konštrukciu. Pohon zabezpečujú dva krokové motory z disketovej mechaniky.
Elektronika je rozložená na dve sendvičové dosky, pre riadenie je použitý výkonnejší mikroprocesor Philips 80C552 doplnený pamäťou EPROM a RAM.
Senzorická časť pozostáva z fotoodporov, ktoré sú taktiež osvetľované červenými fotodiódami. Napájanie zabezpečujú bežné tužkové akumulátory 1,5V v celkovom počte ?ks.
Autor: Peter Lacko
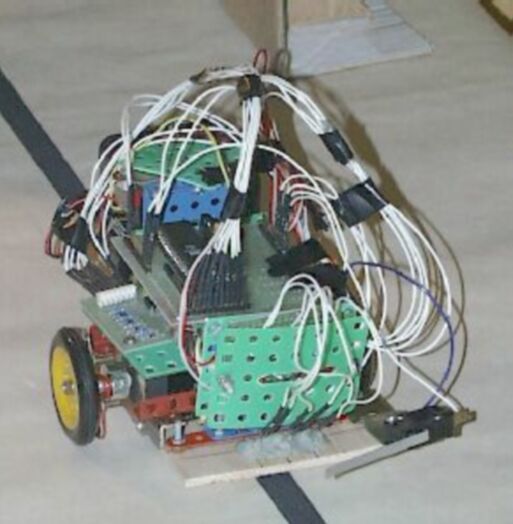
Základ konštrukcie je podobný, trojkolesový vozík s pohonom krokovými motormi z disketovej mechaniky. Robot má kvalitné kolieska s pneumatikami zo stavebnice Merkur. Prvky tejto stavebnice sú použité aj pri konštrukcii kapoty.
Riadenie zabezpečuje mikroprocesor Atmel 89C52 doplnený výkonovými tranzistormi BC640 oddelené optočlenmi.
V prednej časti sa nachádza nárazník s kontaktným spínačom na detekciu prekážky na dráhe.
Napájanie zabezpečujú bežné tužkové batérie 1,5V (spolu 12ks).
Autor: Ján Palenčár
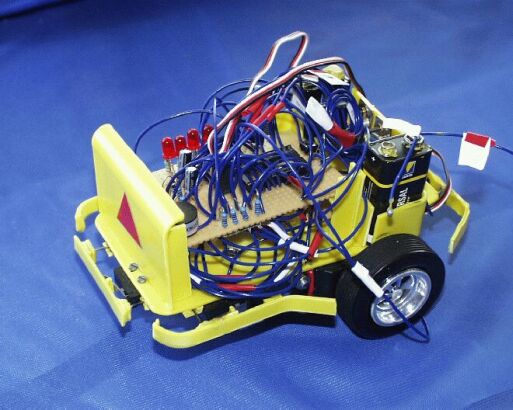
Robot Jána Palenčára vynikal estetickou konštrukciou z plastu. Trojkolesový vozík mal dve kolesá nezávisle poháňané modelárskymi servomotormi a jedno voľné podporné koliesko.
Riadenie zabezpečuje mikropočítačový modul Basic Stamp (Parallax, Inc.), ktorý je programovateľný v jaziku PBASIC. Je to upravená verzia známeho interpretra jazyka BASIC doplnená o výkonné inštrukcie pre prácu s vstupno-výstupnými portami.
Senzorická časť, pozostávajúca z fotoodporov sa ukázazla najslabším článkom tohoto výrobku. Pre chybu jedného prvku sa nepodarilo robotovi nájsť čiaru ani v jednom z troch pokusov.
Napájanie zabezpečujú batérie 9V.