[Novinky]
[Pravidlá]
[Roboti]
[Poradňa]
[Archív]
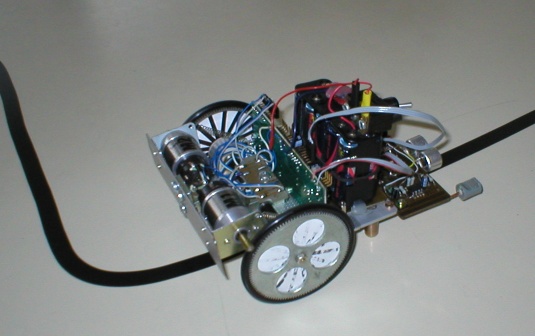
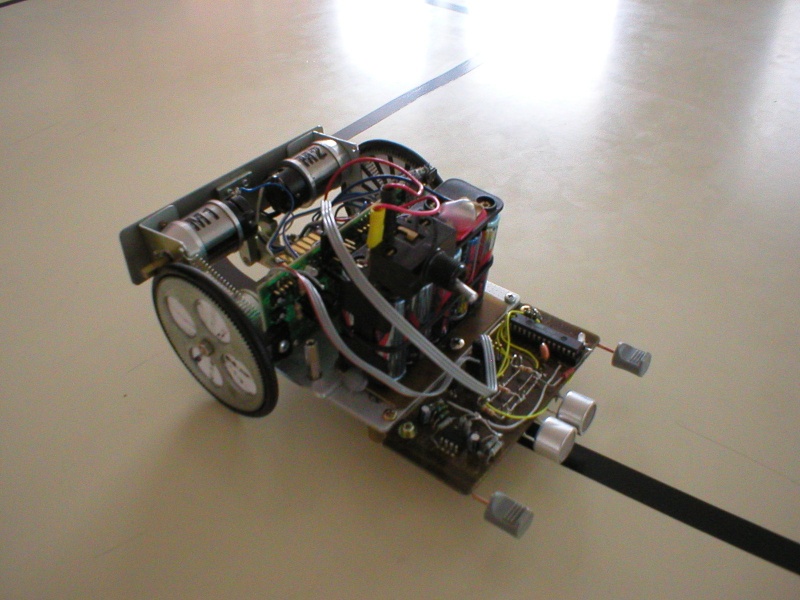
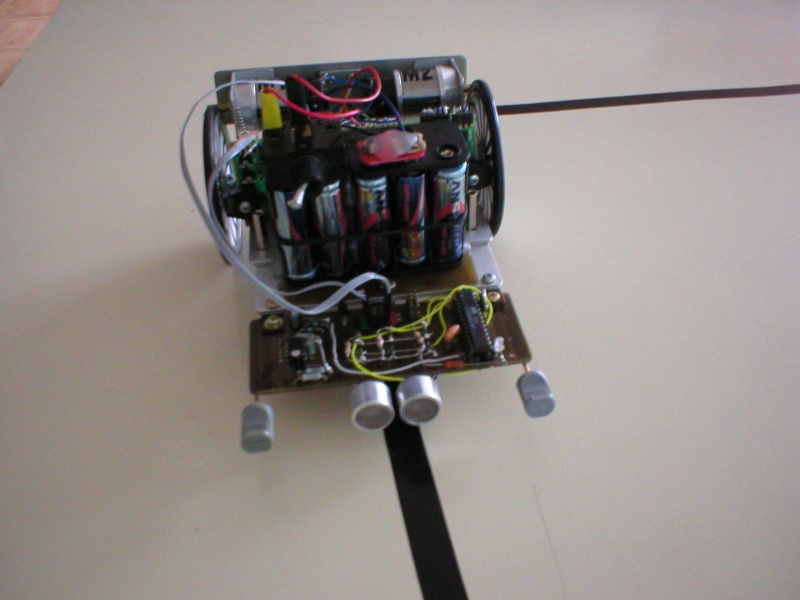
Irtak3
Autor(i): Rudolf Michalec, Juraj Pollak
Základné údaje
| Ridiaci procesor: | AT908515, AT90S4433 |
| Veľkosť pamäte: | 8kB Flash, 4kB Flash |
| Frekvencia: | 8MHz, 4MHz |
| | |
| Senzory: | 3 x optický, 2 x pootočenia, 1 x ultrazvuk |
| Pohon: | 2 x jednosmerny motor |
| Napájanie: | 12 V |
| | |
| Programovací jazyk: | Assembler |
| Zaujímavosti: | krasavec :-) |
|
| Domáca stránka robota: | |
Popis
Obrázky
[Novinky]
[Pravidlá]
[Roboti]
[Poradňa]
[Archív]
© 2004 Richard Balogh
Posledná zmena: 20. apríla 2004.