Obrázky robotov - sú pripravení vás poraziť!
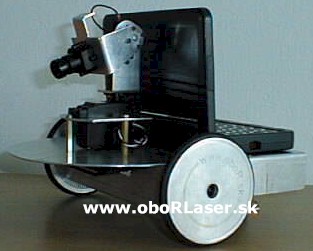
- oboRx (Robert Lászlo)
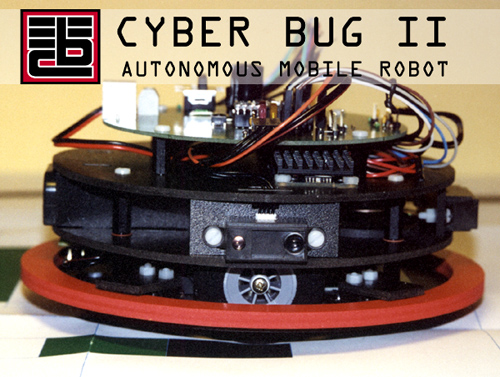
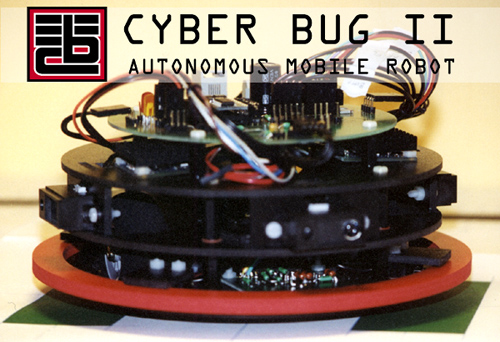
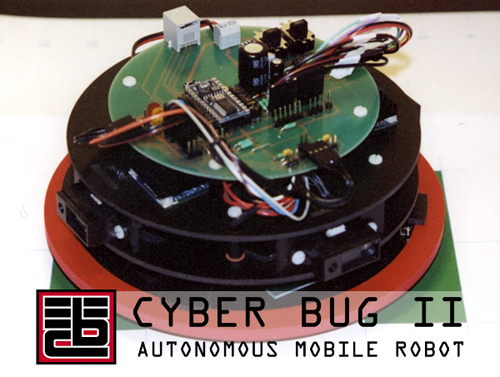
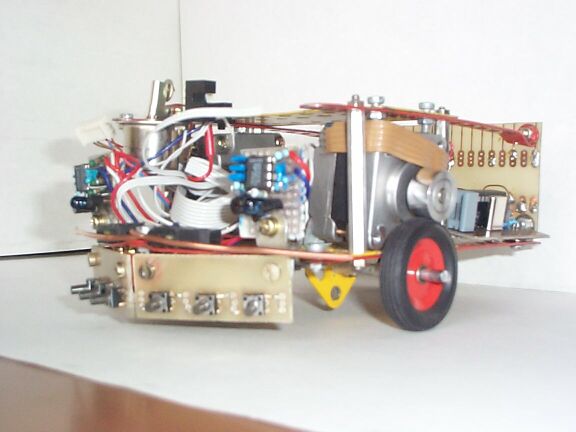
- Cyber Bug II (Jopy Hečko)
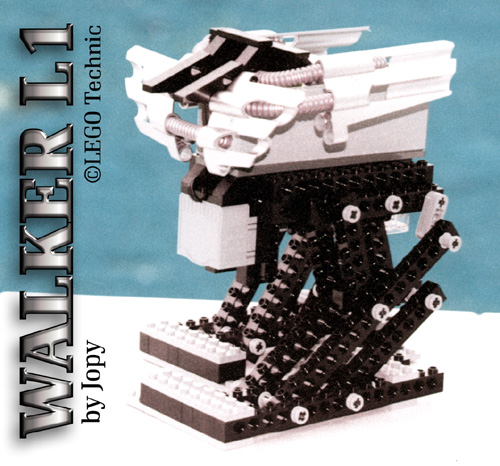
- Walker (Jopy Hečko)
- Emil (Jiří Cyroň)
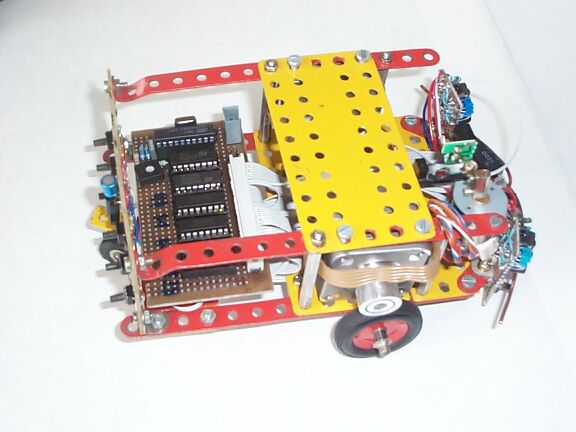
- Bluebot (Ján Cieker)
- 2x DC motor s optickou spätnou väzbou
- 1x Laserový diaľkomer
- 1x Linear CCD kamera 1024d
- Low level driver Atmel 8052
- High level 80186/20MB Flash Hdd, OS: Microsoft DOS

Toto je môj Cyber Bug II. Po hardwareovej stránke
dokončený. Na software pracujem.
Toto je môj kráčajúci robot. Je z LEGA a celý pohyb riadi
jeden jediný motorček.
Jako hnací jednotky byly použity servomotory, které se ukázaly jako
nevyhovující. Proto budou nahrazeny krokovými motory. Jelikož toto zatím
nebylo realizováno, mohou nastat různé problémy, například kvůli vyššímu
odběru nemusí stačit baterie, apod.
Doplňující informace:
- pohon dvěma servomotory FUTABA
- řízení dvěma procesory ATMEL
- trojice optických senzorů pro sledování čáry
- trojice optických senzorů pro objíždění překážky
- sériový A/D převodník pro sledování napětí baterie
- automatické dobíjení při poklesu napájecího U pod stanovenou mez
- robot je konstruován pro nepřetržitý pohyb ve vitríně katedry
- výhledově bude robot vybaven obvodem RTC (musí přece v noci spát)

Dvojkolesové vozítko s dvoma krokovými motormi na pohon a otáčanie podvozku
a jedno podporné koliesko, snímače nárazu na prekážku zpredu a zozadu rozdelené na
pravú ľavú časť, infrared detekcia prekážky pred vozítkom, infrared snímanie
kontrastnej čiary na zemi, kontrola stavu batérií, meranie teploty okolia,
zisťovanie osvetlenia a frekvencie zvuku z prostredia, zisťovanie farby povrchu
pod robotom, ultrazvukový snímač a meranie vzdialenosti od prekážky.
Dvojprocesorová konštrukcia s využitím špeciálneho multiprocesorového módu
komunikácie s ďalším procesorom a s inými procesormi, robotmi a PC. Osemtaktné
riadenie kroku motorov sekvenčnou logikou, možná bezdrôtová komunikácia medzi
niekoľkými robotmi (zatiaľ len dva) a niekoľkými PC.
Mnohé veci su len vo fáze uvažovania a k ich praktickej realizácii možno ani
nedôjde.
O túto stránku sa stará a je za ňu zodpovedný:
Richard Balogh.
Posledná zmena: 20. apríla 2001
© 2001 Katedra automatizácie a regulácie FEI STU
Ilkovičova 3, 812 19 Bratislava