[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
Mobilni robot pro kategorii MicroMouse Diferencialni rizeni pohonu, 2 krokove motory. 3 IR senzory vzdalenosti. Zatim vyuziva algoritmus sledovani zdi pro prochazeni bludiste.
Současný stav:
Stručný popis:
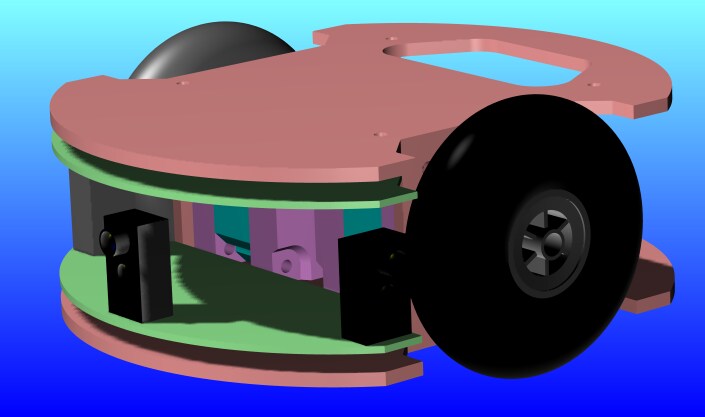
Konstrukce je podřízena maximální jednoduchosti a co nejnižší ceně. Meachnická část je tvořena dvěma deskami spojenými distančními sloupky. Pohon obstarávají dva krokové motory z disketových mechanik.
Současné napájení 7 NiCd článků 900mAh, počítám s nahrazením 4 články LiON s kapacitou 1850mAh. Základ elektroniky je AVR90S8515, která řídí pohony a dále veškerou inteligenci. Pro obsluhu čidel je vyhrazena AVR90S2313. Jako čidla použity SFH506, bohužel zde mám problem. (Všichni, se kterými jsem komunikoval musí dosah uměle snižovat. Já bych ho potřeboval naopak zvednout, při vybuzeni IR LED 10mA, mám dosah pouze 6cm.)
Zatím posílám pouze obrázek z CADu, nemám digitální foťák.
![]()
 |
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2002 Richard Balogh
Posledná zmena: 7. marca 2003.