[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
| Ridiaci procesor: | PIC16F84 |
| Veľkosť pamäte: | dátová pamäť 64B, RAM=36B, programová pamäť EPROM=1Kx14 |
| Frekvencia: | 4Mhz |
| Senzory: | pomocou PLL v IR spektre |
| Pohon: | hlavný pohon-regulácia rýchlosti: PŠM modulácia, napájanie: 12V, krokový motor-napájanie: 3V |
| Napájanie: | Pb batéria LONG 12/0,8Ah |
| Programovací jazyk: | assembler |
| Zaujímavosti: | jednoduchá konštrukcia, malé náklady, riadené jedným čipom, ... |
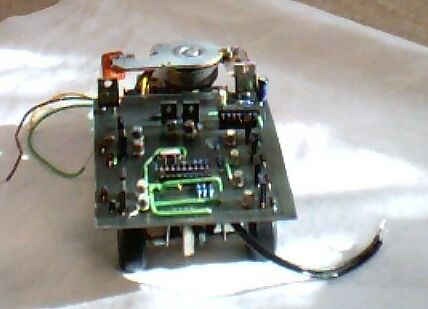
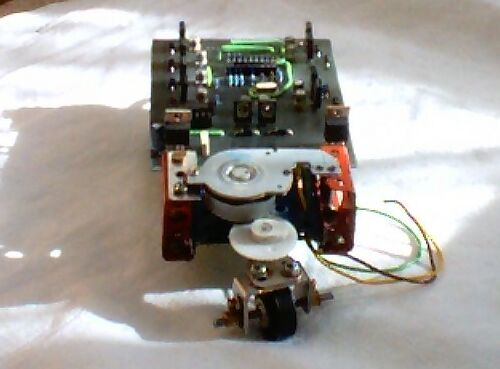
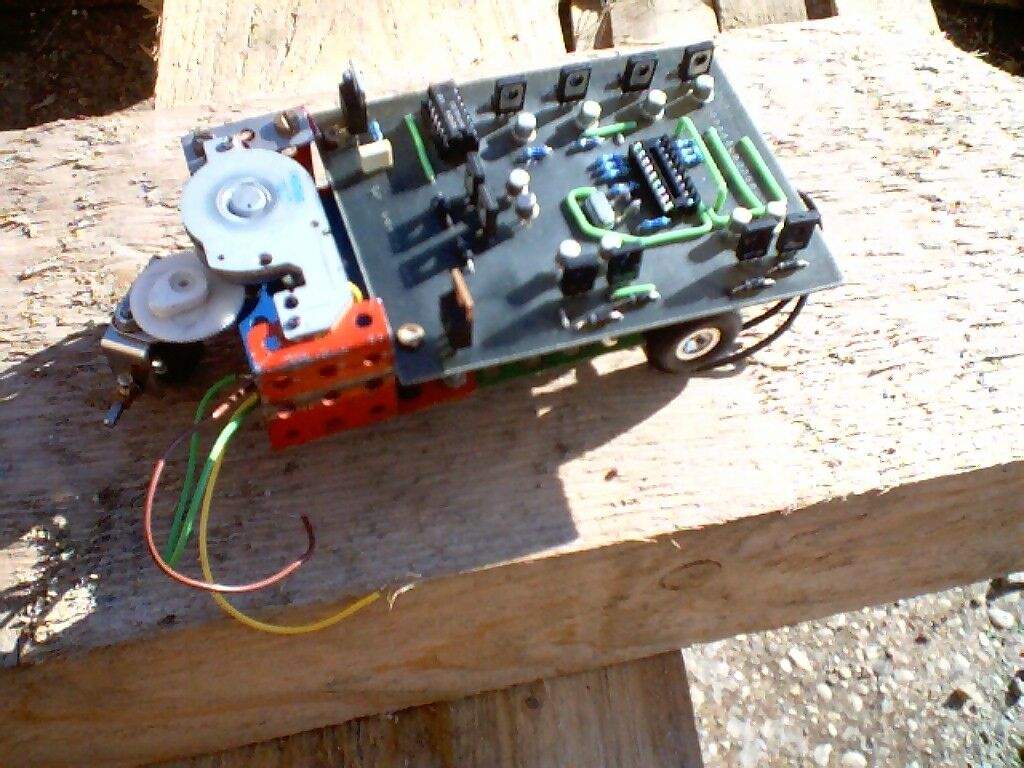
Základná konštrukcia použitá zo stavebnice MERKUR. Na riadenie pohonu a vyhodnotenie polohy čiary je použitý jediný mikrokontrolér PIC16F84.
Hlavný pohon zabezpečuje 12V js motor, na riadenie smeru pohybu je použitý krokový motor z CD ROM.
Detekcia čiary je zabezpečená pomocou troch senzorov na báze PLL v IR oblasti spektra. Na detekovanie a obchádzanie prekážky sú použité dva senzory (vpredu a na ľavej strane).
Napájanie celého robota zabezpečuje 12V Pb akumulátor LONG s kapacitou 0,8 Ah.
Rozmery robota: d x š x v = 160 x 85 x 60
![]()
 |
 |
 |
 |
 |
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2003 Richard Balogh
Posledná zmena: 2. apríla 2003.