
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
Tak dnes plnim svoj slub a davam na ukazku zopar veci z mojho robota, ktory sa vola F.A.A.K. 2003 :-). Robim na nom uz vlastne druhy rok, tento rok som to pre drobne hardwareove chyby a nedostatku casu na soft nestihal, tak snad teraz :-). Co sa tyka konstrukcie, navrhoval som ho tak, aby sa mohol zucastnit obidvoch hlavnych disciplin, cize aj path-followera aj micromouse.
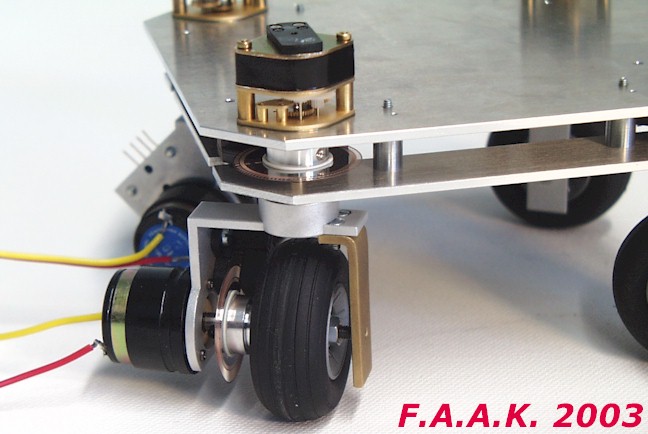
Kedze som ho chcel realizovat ako viackolesovu konstrukciu, bolo treba vyriesit problemy s rozmermi a pohonmi, aby sa vobec do bludiska zmestil. Preto su vsetky styri kolesa riaditelne, dve (zadne) su hnacie. Na pohon su pouzite jednosmerne motorceky s prvodovkami, na snimanie polohy IRC snimace, z ktorych sa vyhodnocuje aj rychlost.
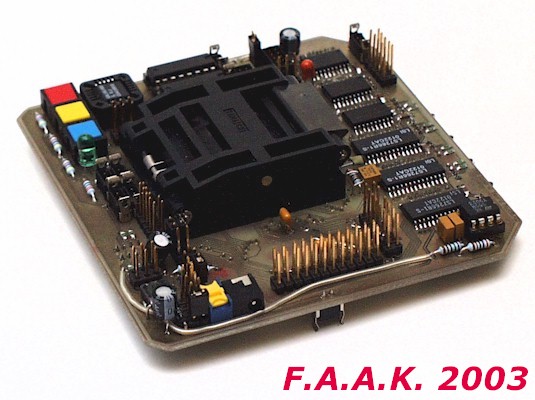
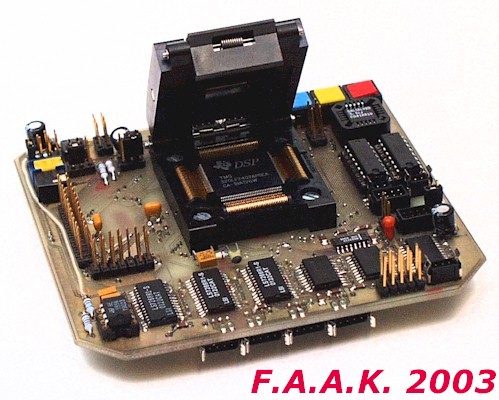
Robot bude riadeny 40Mhz DSP procesorom Texas Instruments TMS320LS2407A. Na obrazkoch mozete vidiet jednak sucasnu (docasnu) verziu, kedy je riadenie robene pomocou tzv. Starter-Kitu k tomuto procesoru, na ktorom je 30 MHz verzia DSP, jednak moju novu riadiacu kartu, na ktorej je uz 40 MHz verzia procesora. Tato karta nahradi vsetky tie tri dosky, ktore su na robote teraz.
Vyhoda tohto procesora, ktory je vlastne takym mixom medzi DSP a mikrokontrolerom, je, ze obsahuje rychle vypoctove jadro z DSP procesorov a kopu periferii, typickych pre kontrolery. Moja (144-pinova) verzia teda obsahuje 4 casovace, ktore mozu byt naprogramovane na generovanie 6 dvojic PWM signalov (co sa mi dost zislo, kedze riadim 6 motorov), dalsie 2 jednoduche PWM signaly, rozne mody generovania preruseni a v pripade, ze sa pouzije ako zdroj signalu casovacov externy signal, tak aj na spracovanie signalov z 2 IRC snimacov (samozrejme, nie uplne vsetko sa da robit naraz :-)).
Dalej je na procesore 16 kanalovy 10-bitovy AD prevodnik a digitalne I/O (pocet zavisi od pouzitia signalov, vacsina pinov ma 2 az tri volitelne funkcie).
Samotny procesor ma nejaku RAM-ku uz na cipe, na doske je 64K externej pamate. Program je mozne napalit do 32K FLASH pamate, ktoru je mozne preprogramovat aj pocas behu procesora :-) (fakt neviem, naco by sa to asi dalo vyuzit :-)).
Programuje sa to bud v asembleri, alebo lepsie v C-cku. Cena procesora sa inac pohybuje tak na urovni 10USD.
Pouzite su jednosmerne motorceky (JM) - firma, od ktorej som ich kupil, sa da najst na www.ftb-bertsch.de. Tato firma vyraba relativne maly sortiment JM (aj s prevodovkami), ale maju svoju technologiu vyroby (ploche kotvy) a vdaka nej su motorceky dostatocne male.
Od minuleho roka sa tato firma stala sucastou inej firmy, resp. jej sortiment je cez tuto firmu ponukany, a to www.faulhaber.de. Ta ma pre zmenu dost siroky vyber roznych motorcekov, aj s prevodovkami a pripadne s IRC snimacmi. Tieto mikromotorceky sa pouzivaju v roznej technike, napr. zdravotnickej, a bohuzial tomu zodpovedaju aj ceny. Uvadzam to skor pre zaujimavost, co vsetko sa da zohnat. Kvalitu tychto vyrobkov (a ceny) by som prirovnal k motorom Maxon (vid Pathfinder).
No a minuly rok som kupil este nejake motorceky od svajciarskej firmy Pewatron (www.pewatron.com). Tie boli relativne lacne (tak 400-500Sk/ks+clo) v porovnani s modelarskymi servami, mali uz tiez prevodovky a myslim, ze boli aj vykonnejsie, co sa tyka tociveho momentu. Boli vsak vacsie ako tie, ktore ste mohli vidiet na robotovi (dlzku s prevodovkou bez hriadela maju tak 6cm). Ak by ich niekto hladal v katalogoch, maju oznacenie HN-6H-1329Y. Uvadzam to preto, lebo to bola podla mna asi najvhodnejsia kombinacia, co sa tyka velkosti motora/momentu/otacok/napajania na maly robot.
Podobne konfiguracie sa ale daju najst (aj lacnejsie, ak je to bez cla) napr. v katalogoch firmy Conrad (www.conrad.com) a u nas najnovsie www.farnell.com - od tejto firmy som kupil aj IRC snimace, ktore ste mali moznost vidiet.
Cize to je zhruba prehlad tych firiem, kde som zhanal motorceky + snimace. Je pravda, ze aj ked je JM lacnejsi a zaroven vykonnejsi ako krokac a riadenie JM je v podstate tiez jednoduche (zmenou napatia), nutnost pouzitia snimacov na meranie rychlosti/polohy ich pred krokacmi znacne znevyhodnuje :-( (cenovo aj hardware-ovo). Viac k tejto teme najdete myslim aj v poradni. Ceny jadnoduchych IRC snimacov (ake som mal) sa pohybuju okolo 1500-2000 Sk/ks.
Co sa tyka senzorov, na prekazky tam mam zatial rovnake senzory ako Jopy, teda GP120, ale moc som ich este pocas behu robota netestoval.
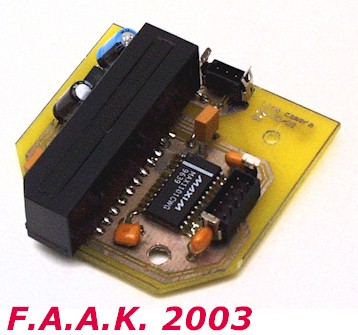
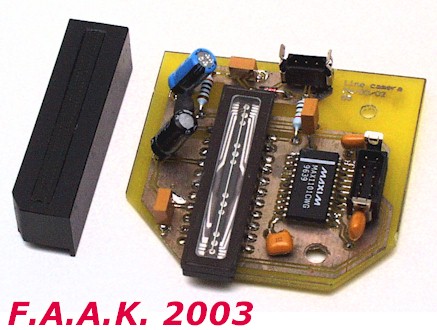
Na snimanie ciary je pouzity riadkovy CCD snimac Sony ILX551 s 2048 pixelmi. Keby ho niekto zhanal, neviem, ci sa mu to podari :-), lebo uz by mal byt nahradeny nejakym novsim typom (dostal som nejaky mail od distributora, ale cislo toho noveho cipu teraz presne neviem).
Na obrazkoch je aj karta so senzorom a s/bez objektivu. Na digitalizaciu obrazu je pouzity cip Maxim MAX1101, ktory data posiela do DSP cez rychle seriove SPI rozhranie.
Predpokladam este dalsie rozsirenie hardwaru, ktore by malo prispiet k moznosti riesenia zlozitejsich uloh robotom, ale zatial moc nechcem prezradzat, lebo sam neviem, ci sa mi to podari a ako to stihnem (do sutaze asi nie). Tak nerad by som tu sluboval hory-doly, ked to nakoniec nebude. Ale pokial sa mi to podari, dam vediet :-))).
To je asi k hardwaru na uvod vsetko, co sa tyka softu - momentalne sa mordujem s modelom robota, na zaklade ktoreho budu moct byt generovane zelane hodnoty rychlosti/poloh jednotlivych kolies, aby robot dokazal sledovat nejaku zadanu trajektoriu. Na modelovanie/simulovanie robota pouzivam Matlab/Simulink, kde uz sa v kombinacii s roznymi toolboxami daju robit celkom dobre vecicky. Na ukazku takej jednoduchsej animacie robota som dal na martana aj jedno video - model robota na nom este nemam celkom dorobeny, aj pohyby nezodpovedaju realu, su to len generovane rychlosti, ktore by v reali neboli realizovatelne. Ale na predstavu to moze byt dobre.
![]()
 |
 |
 |
 |
 |
 |
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2002 Richard Balogh
Posledná zmena: 4. decembra 2002.