[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
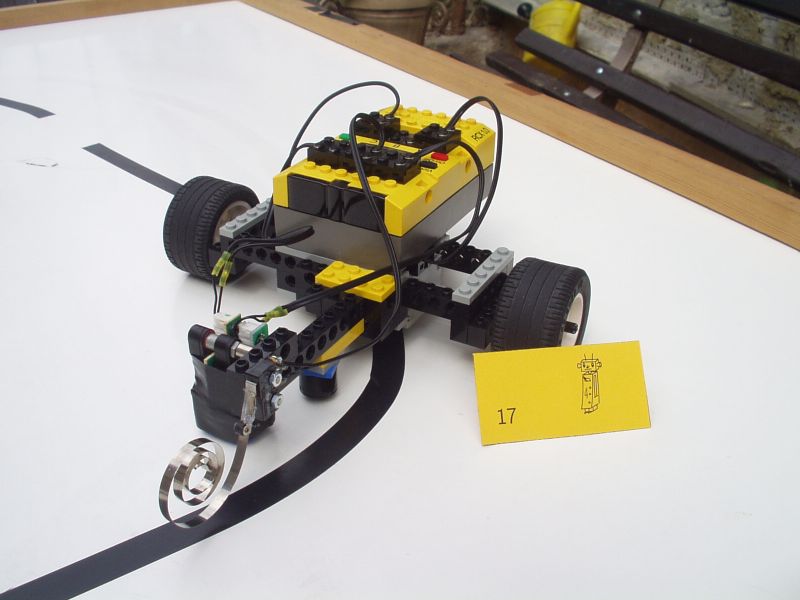
Robot byl postaven metodou KISS s cílem udělat co možná nejjednoduššího robota ze stavebnice Lego, který by dokázal spolehlivě projet celou soutěžní dráhu na soutěži ISTROBOT.
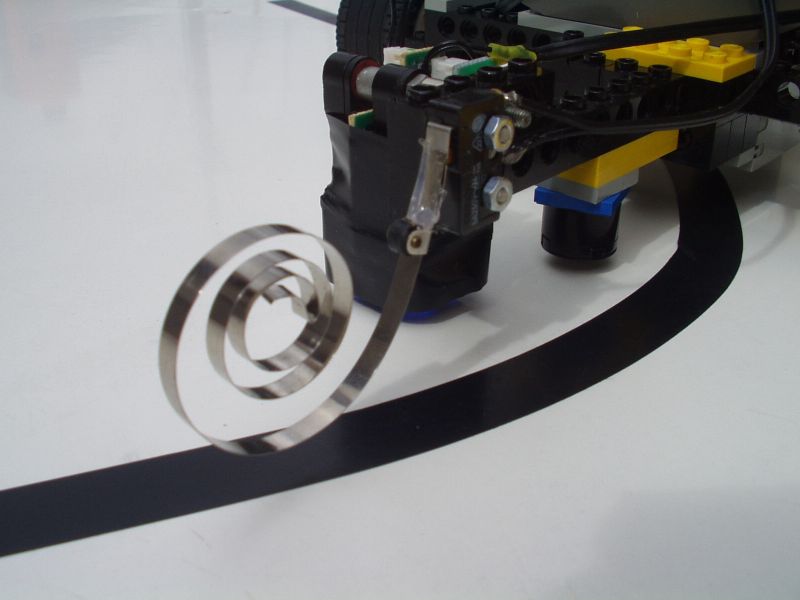
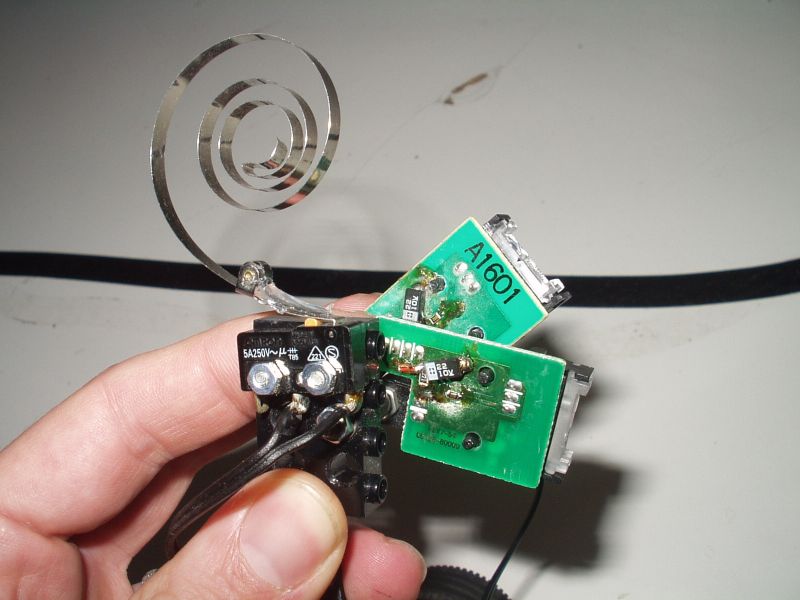
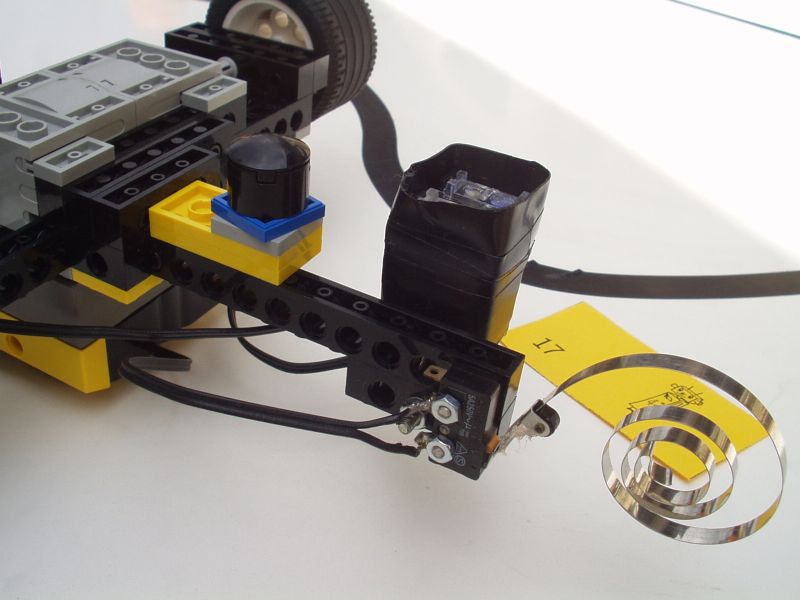
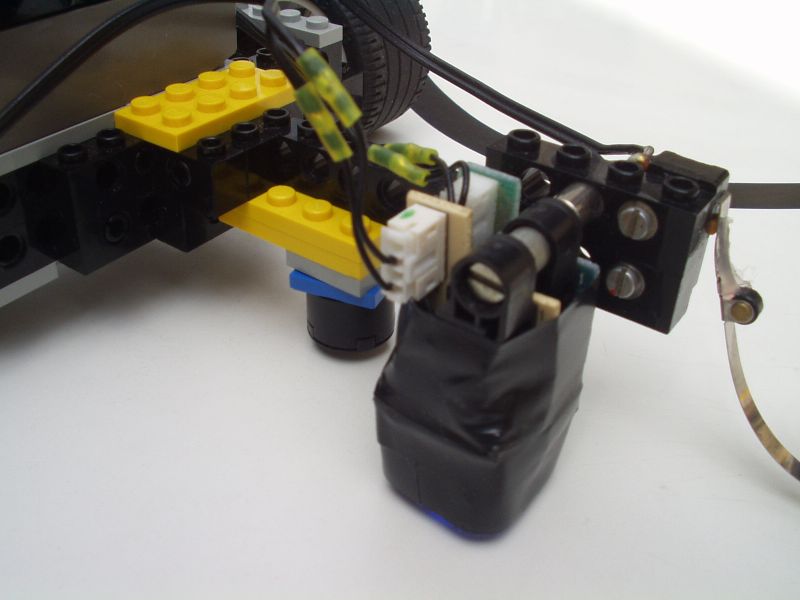
Protože řídící kostka má pouze 3 vstupy, je robot vybaven pouze třemi čidly. Jako čidlo nárazu na překážku je použit mikrospínač z mincovního automatu, který jsme nalezli na skládce na ostrově Majorka. K mikrospínači je přilepeno péro z budíku, které tlumí náraz.
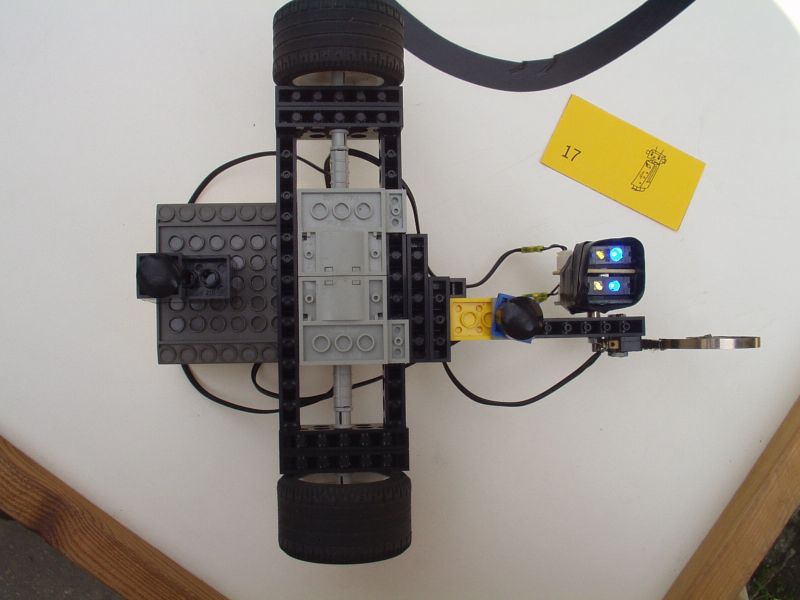
Protože ve stavebnici Lego Robotics Invention je pouze jedno světelné čidlo, vyrobili jsme pro robota čidla za použití senzorů na papír z vyhozených inkoustových tiskáren. Potřebné součástky pro adaptaci čidel na vstupy kostky RCX jsou připájeny přímo na plošné spoje čidel.
Zapojení je zřejmé z tohoto schématu.
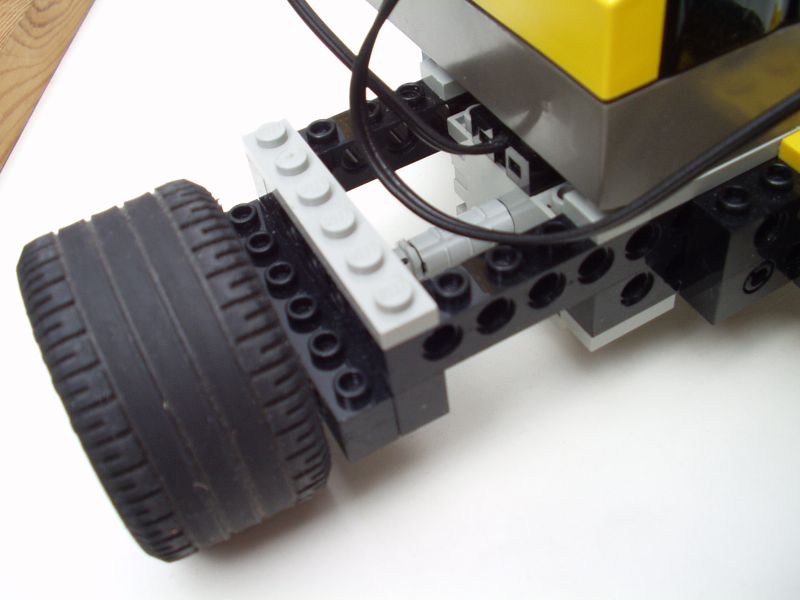
Mechanická konstrukce robota je zřejmá z následujících obrázků.
Program pracuje na následujícím principu. Pokud robot vidí čáru, zaznamená si, pod kterým čidlem ji vidí a jede rovně. Pokud čáru nevidí, tak jede tam, kde ji viděl naposled. Pokud zatáčí již příliš dlouho, znamená to, že čáru ztratil. Potom zacouvá, popojede rovně vpřed a snaží se čáru nalézt pomocí velmi mazané rutiny "cikcak".
Objetí překážky je založeno na předpokladu, že čára za překážkou pokračuje ve stejném směru jako před ní. Robot po nárazu na překážku couvne a vycentruje se na čáru. Potom překážku slepě objede. Po znovunalezení čáry se přepokládá, že čáru přejel a otočí se ve směru objíždění, aby se znovu vycentroval na čáru.
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2004 Richard Balogh
Posledná zmena: 1. marca 2004.