[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
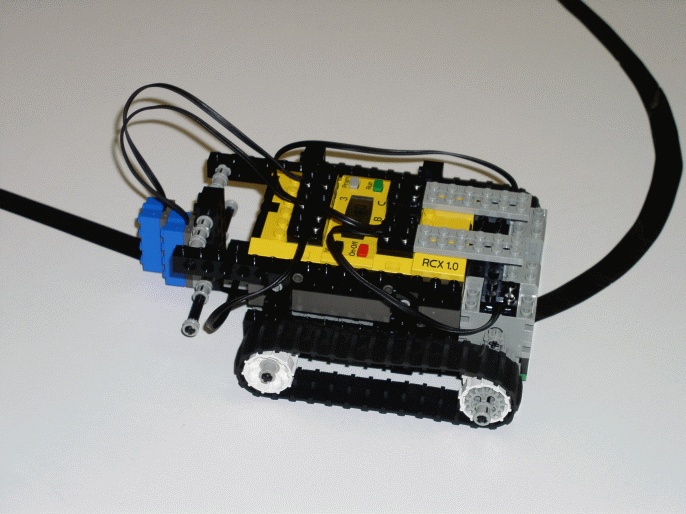
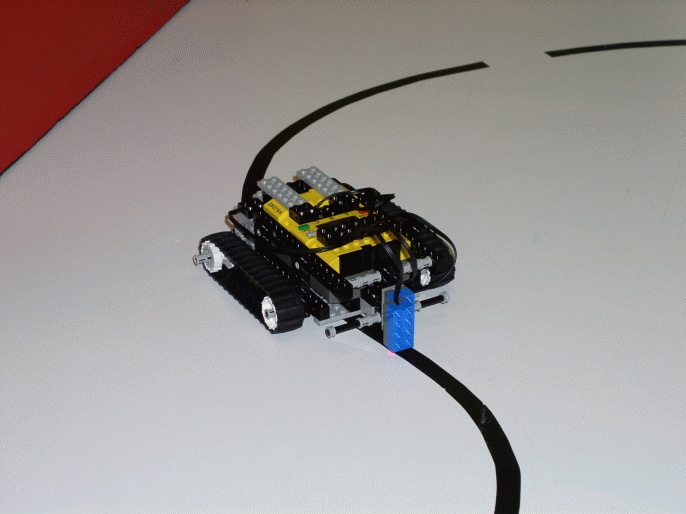
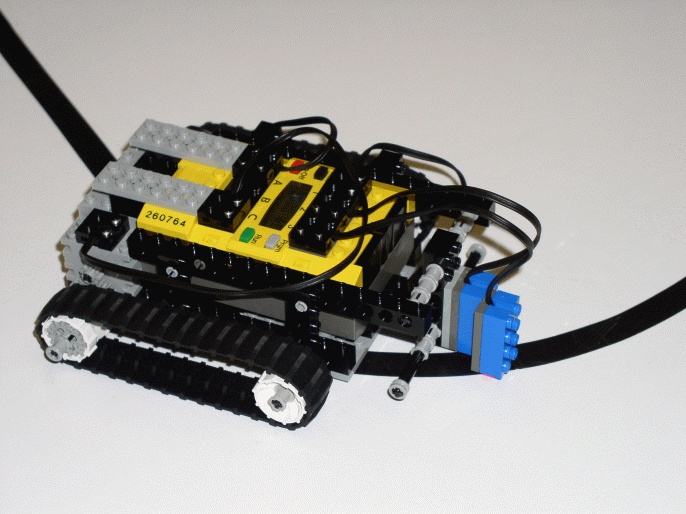
Pásovec je riadený niekoľkými správaniami v zmysle behaviorálnej robotiky. Základné správanie spočíva v tom, že jeden IR senzor sníma čiaru, druhý - umiestnený napravo od neho plochu mimo čiary. Ak je rozdiel výrazne kladný, vybehli sme doľava, ak takmer nulový, vybehli sme doprava. Na základe toho robíme korekciu. Ďalšie správania ošetrujú prerušenie čiary a obídenie prekážky.
|
|
|
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2004 Richard Balogh
Posledná zmena: 1. apríla 2004.