


[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
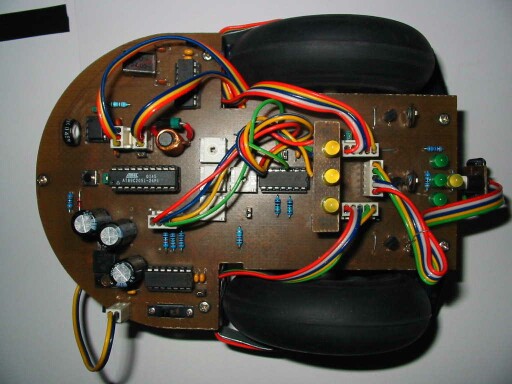
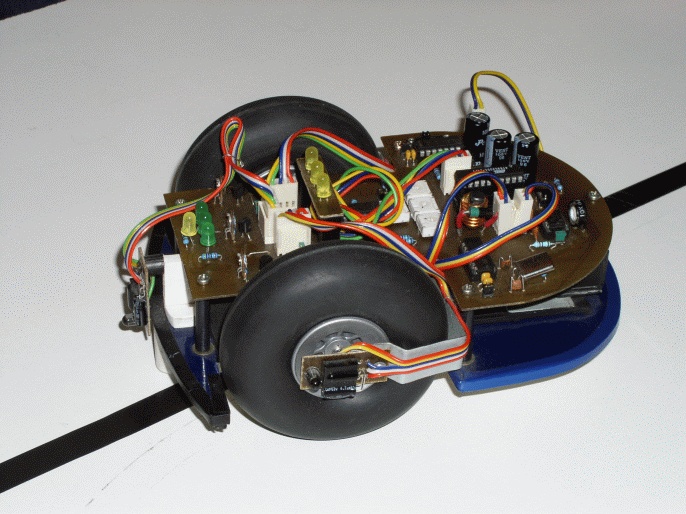
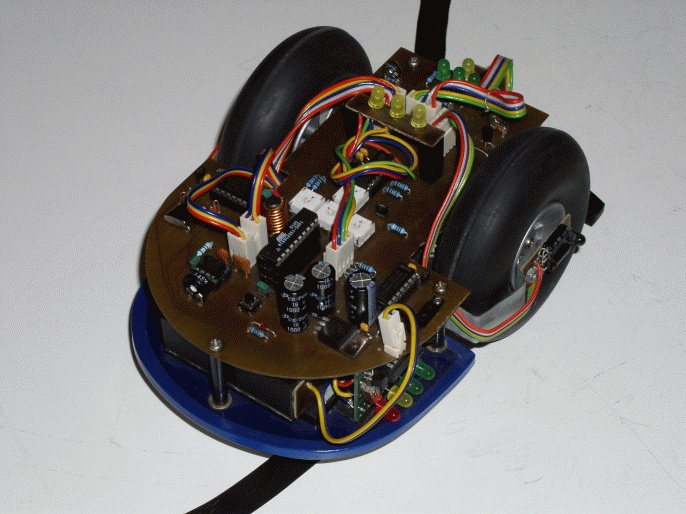
Robot je postaveny na trojkolesovom podvozku.Dve predne kolesa su priamo hnane servomotormi,zadne koliesko sluzi ako opora.Riadiacu cast tvori mikroprocesor Atmel 89C2051.Ciaru snima pomocou 4 parov infra-LED + infra-tranzistor cez komparator LM324.Na sledovanie prekazky pred sebou a po stranach pouziva infraprijimace SFH506-36.
|
|
|
|
|
|
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2003 Richard Balogh
Posledná zmena: 1. apríla 2004