Introduction
to Bayesian Robot Programming
and
Probabilistic Robotics
The
information acquired using robot sensors is noisy, incomplete, and
ambiguous. 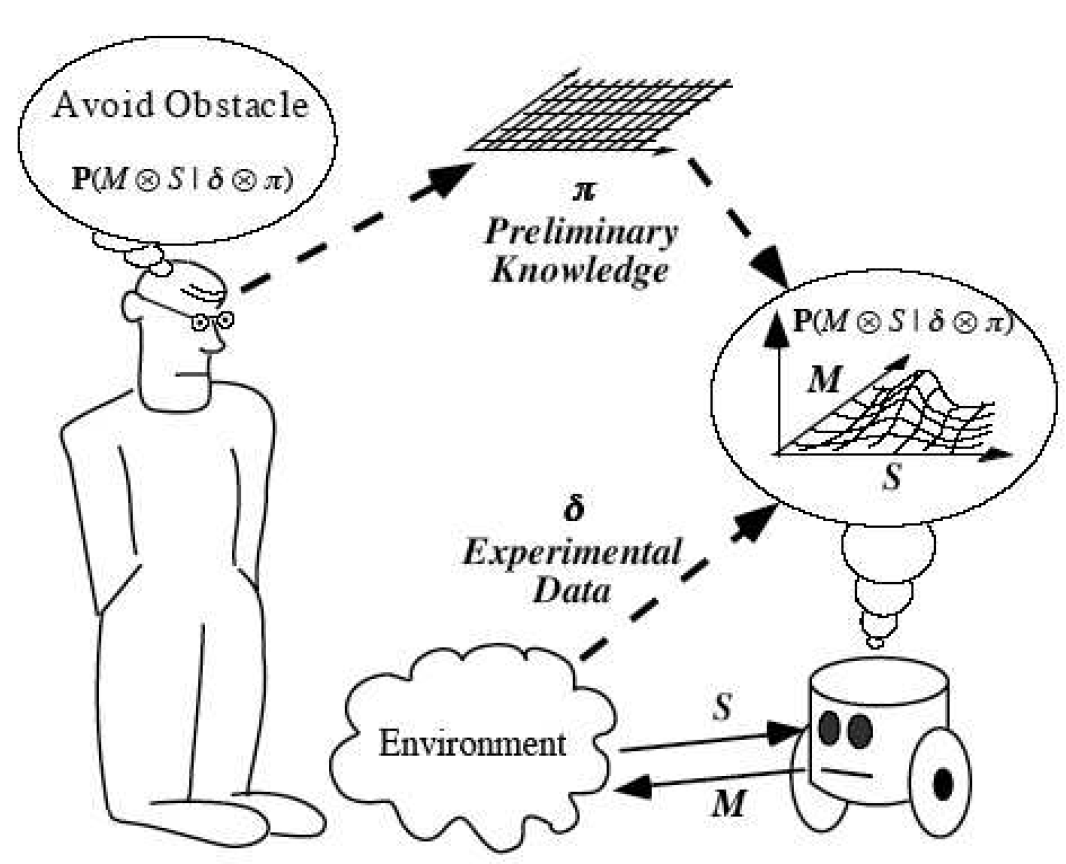 Robots
create models of environment using probabilities and solve tasks with
the help of probabilistic reasoning. The parameters of probabilistic
models can be learned using the environmental data. This talk will
introduce the field of Probabilistic Robotics.
Robots
create models of environment using probabilities and solve tasks with
the help of probabilistic reasoning. The parameters of probabilistic
models can be learned using the environmental data. This talk will
introduce the field of Probabilistic Robotics.
Pavel
Petrovič, Robotika.SK
Wednesday,
March 26th,14:00
- 15:30
room D-424,
Faculty of Electrical Engineering and Information Technology, STU,
Bratislava (Ilkovičova 3)