Robotické prázdniny 2.0 |
| |
|

|
|
 |
|
|
 |
|
|
 |
|
|
 |
|
|
Praktická časť, ktorá bola bezpochyby najaktraktívnejšou časťou kurzu, predpokladala kompletný návrh a realizáciu mobilných robotov vyhovujúcich pravidlám súťaže mobilných robotov organizovanej každoročne Katedrou automatizácie a regulácie. Navrhované roboty museli vyhovovať propozíciam kategórie Pathfollower, čo je kategória, kde robot sleduje čiernu čiaru na bielom podklade, pričom musí zvládnuť niekoľko typov prekážok na trati. Presné informácie o súťaži i podmienkach účasti možno nájsť na tu. |
|
Kurzu sa aktívne zúčastnilo 11 študentov elektrofakulty, plus 4 študenti strednej priemyselnej skoly elektrotechnickej na Adlerovj ulici, ktorí absolvovali teoretickú časť: |
|
Štefan Olešanský Michal Čerňanský Richard Štrba Rudolf Kinder Michal Malý Richard Tesár |
Roman Murár Marián Gargalovič Ján Karpiš Juraj Buno Jaroslav Gregorec |
 |
| 18.6 | ||
| 9.00 | Otvorenie kurzu. | Ing.Omelka |
| Oboznámenie účastníkov s náplňou kurzu, priebehom, harmonogramom, cieľom a úlohami. | Ing.DúbravskyIng.Balogh | |
| 9.30 | Popis základných častí mobilného robota – koncepcie, stručný prehľad používaných komponentov. | Ing.Diosi |
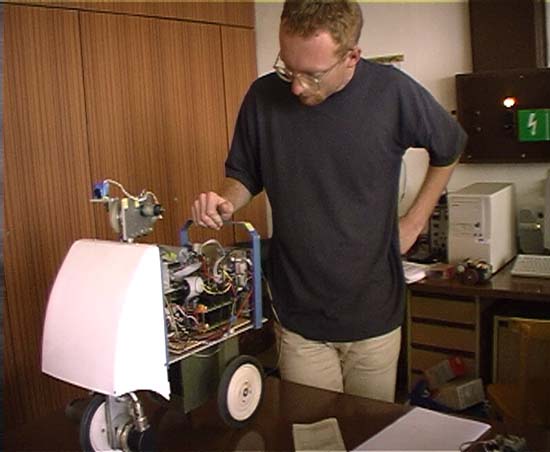
| 10.30 | Ukážky katedrových mobilných robotov. | |
| Oboznámenie účastníkov s pracoviskami – možností, obmedzenia, pravidlá. | ||
| Predstavenie študentov. Rozdelenie účastníkov do skupín. | ||
| 13.00 | Pohonné jednotky mobilných robotov – výkonové obvody | Ing.Kužma |
| 15.00 | Mobilná robotika vo svete, súťaže všeobecne, reportáž zo súťaže EUROBOT ‘2001. | Ing.Balogh |
| 16.00 | Rozdelenie si úloh v rámci skupín. | |
| Samostatná práca – výber koncepcie, príprava. | ||
| 19.6 | ||
| 9.00 | Senzorické systémy mobilných robotov. |
Ing.Kužma Ing.Diosi |
| 10.00 | Napájanie mobilných robotov – zdroje energie. | Ing.Ďurina |
| 10.30 | Výber koncepcie robota, mechanika, návrh výkonových častí. | |
| 13.00 | Mikropočítače a programovanie. | Ing.Balogh |
| 15.00 | Návrh výkonových častí, realizácia mechanických častí. | |
| 17.00 | Roboty Jopyho Hečka. | |
| 20.6 | ||
| 9.00 | Výroba plošných spojov, spôsoby návrhu. | Ing.Ďurina |
| 10.00 | Mechanika, realizácia výkonových častí. | |
| 13.30 | Mechanika, realizácia výkonových častí. | |
| 21.6 | ||
| 9.00 | Realizácia výkonových častí robota. | |
| 13.00 | Reportáž zo súťaže MICROMOUSE London‘2001 | Ing.Balogh |
| Robotická súťaž na FEI ‘2001 – premietnutie videa | ||
| 22.6 | ||
| 9.00 | Spracovanie obrazu | Ing.Mičušík |
| 13.00 | Ukončenie výkonových častí robota | |
| 25.6 | ||
| 9.00 | Neurónové siete | Ing.Čerňanský |
| 10.00 | Návrh riadiacich obvodov, výber mikropočítača. | |
| 13.00 | Výber senzorických systémov. | |
| Realizácia riadiacich obvodov. | ||
| 26.6 | ||
| 9.00 | Realizácia riadiacich obvodov, konštrukcia senzorov. | |
| 13.00 | Konštrukcia senzorov. | |
| 27.6 | ||
| 9.00 | Konštrukcia senzorov. | |
| 13.00 | Konštrukcia senzorov. | |
| Kompletizácia, programovanie robota | ||
| 28.6 | ||
| 9.00 | Kompletizácia, programovanie robota | |
| 13.00 | Kompletizácia, programovanie robota | |
| 29.6 | ||
| 9.00 | Programovanie robota, ladenie snímačov, tvorba dokumentácia | |
| 13.00 | Prezentácia + Súťaž všetkých robotov | |
|
Pri realizácii vlastných mobilných robotov vznikli tri skupiny, z ktorých dvom sa podarilo v priebehu kurzu práce zdarne ukončiť a zúčastniť sa malej minisúťaže v závere. Motiváciou pre všetkých boli mobilné roboty z tohtoročného a minuloročného ročníka súťaže mobilných robotov. |
|
|
Prvú skupinu tvorili R.Štrba a R.Murár, ktorí v rámci kurzu pokračovali na vývoji už začatého mobilného robota. Jedná sa v porovnaní s ostatnými robotmi o náročnejšiu všesmerovú koncepciu, ktorá umožní robotovi vyštartovať z miesta v ľubovoľnom smere. Aj kvôli náročnosti tejto koncepcie sa im v krátkom období dvoch týždňov nepodarilo robot ukončiť, ale veríme, že na budúcoročnej súťaži isto nebudú chýbať. |
|
|
Druhá skupina sa v zložení M.Gargalovič, R.Kinder, M.Čerňanský, R.Tesár, M.Malý rozhodla postaviť mobilný robot s diferenčným pohonom kolies, ktorý neskôr, inšpirovaný fyzickým zjavom robota, nazvali Myš-O-bot. Tento robot sa vyznačuje, vzhľadom na použié modifikované servá, pomerne veľkou rýchlosťou a v závere kurzu nemal na testovacej dráhe konkurenciu. Ako riadiaci procesor bol použitý Atmel89C2051. Viacej informácii o robotovi možno nájsť tu. |
 |
|
Tretiu skupinu tvoril Štefan Olešanský, ktorý vlastnými silami zhotovil robot s príznačným názvom Robot0. Ako pohonné jednotky použil krokové motory z disketových mechaník, pričom riadenie realizoval mikroprocesor PIC16F84. Aj tento robot úspešne zvládol testovaciu dráhu. Stručný popis robota Robot0 je tu. |
 |
|
V závere kurzu sme uskutočnili malú prehliadku vyrobených robotov Myš-O-bot, Robot0 za účasti víťaza tohtoročného kola súťaže mobilných robotov Jopyho Hečka. Na tejto prehliadke nechýbali viacero Jopyho roboty vrátane víťazného robota CyberBugII. Okrem toho sa prvýkrát predstavil mobilný robot Lorry, ktorý zaujal svojou tichou a plynulou jazdou dosiahnutou implementáciou spojitých regulátorov pre sledovanie čiary. |
|
|
Niekoľko obrázkov dokumentujúcich priebeh kurzu. Kliknite na jednotlivé obrázky pre väčšiu verziu. |
|||
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
Videa sú umiestnené na stránkach jednotlivých robotov.
Vyberte si robot: Myš-O-bot, Robot0, Lorry |
|||
|
|
|||
|
|
|||
 
|
|||