| Ridiaci procesor: | Relatko |
| Veľkosť pamäte: | 1 bit |
| Frekvencia: | - |
| Senzory: | dva mikrospínače na detekciu nárazu |
| Pohon: | dve elektromotory (na ľavé a pravé koleso) |
| Napájanie: | 7,2V 6 tužkových akumulátorov |
| Programovací jazyk: | ;-) |
| Zaujímavosti: | najjednoduchší mobilný robot |
| Domáca stránka robota: | www.microstep-mis.sk/~andy |
Reimplemtácia podľa Joseph L. Jones, Bruce A. Seiger, and Anita M. Flynn: Mobile Robots: Inspiration to Implementation. (ISBN 1-56881-097-0)
Ľavé kolo ide stále vpred, pravé ide normálne vpred ale ak dôjde k narazu vzad. Tým pádom sa pri náraze točí na mieste až kým náraz nepominie.
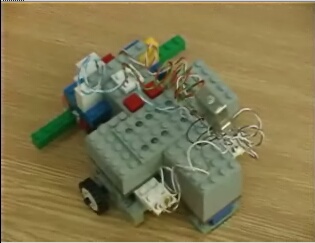
Konštrukcia je LEGO Technik.
Obr. 1.: Schéma zapojenia.
 Celkový pohľad |
Schéma zapojenia |
Ako robot funguje môžete vidieť na tomto videu:
© 2003 Richard Balogh
Posledná zmena: 16. septembra 2003.