Expedícia
na Mars
10.
júna a 7. júla vyslala NASA na Mars dva roboty, Spirit a Oportunity,
aby zistili odpoveď na otázku, či na Marse bola voda. Pristáli
na mieste zvanom Gesevov kráter. Vedci sa domnievajú, že tam bolo
kedysi jazero. Druhým miestom je Meridian Palnerum, kde minerálne
usadeniny naznačujú, že na červenej planéte bola voda.Njadôležitejšou
otázkou expedície je zistiť, ako voda na Marse ovplyvňovala jej
prostredie. Keďže teraz sa tam žiadna voda nenachádza, známky
o jej činnosti sa možu nájst len v geologickom podklade, skalách
a mineráloch, ktoré sa vyskytujú len vo vode. Rovery majú preskúmat
čo najvačší povrch a spraviť snímky, ktoré dodajú vedcom dôležité
informácie.
 |
|
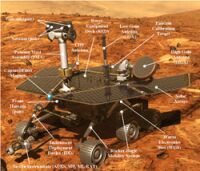
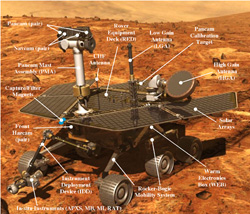
Základné
výskumné nástroje, ktoré rovery nesú so sebou:
- panoramatická
kamera (Panoramic Camera (Pancam)) - určovanie mineralógie a
štruktúry lokálneho terénu
- miniatúrny
teplotný emisný spektrometer (Miniature Thermal Emission Spectrometer
(Mini-TES)) - identifikuje skaly a pôdu pre bližší výskum
- Mössbauer
spektroskop (Mössbauer Spectrometer (MB)) - pre užšie preskúmanie
geologických ložísk železa v skalách a v pôde

- Röntgenový spektroskop(Alpha Particle X - Ray
Spectrometer (APXS)) - na bližšie preskúmanie častíc, ktoré
tvoria skaly a pôdu
- magnety (Magnets) - zbieranie elementárnych
prachových častíc
- mikroskopický snímač (Microscopic Imager (MI))-
na získanie lepšej predstavy o geologických podmienkach
- nástroj na obrusovanie skál (Rock Abrasion
Tool (RAT)) - odstránenie prachu a zvetraných skál z povrchu,
aby sa získali "čerstvé" vzorky na výskum.
|
|
Stavba:
- telo: štruktúra,
ktorá chráni roverove "životné orgány"
- mozog:
počítač na spracovanie informácií, ktorý sa nachádza v module,
nazývanom roverov elektronický modul (REM), vnútri v tele; komunikuje
s ostatnými prístrojmi a senzormi pomocou zbernice VME (Versa
Module Europa bus)
- kontrolóry
teploty: kontrolujú vnútornú teplotu, pretože rovery nemôžu
dobre pracovať pri veľmi horúcich alebo studených teplotách;
ideálne teplotné rozpätie je od -40 až do +40 C; základné časti
rovera - elektronika, počítač a baterky - zostávajú v bezpečí
v "teplej elektronickej skrinke" (Warm Electronics
Box (WEB)), kde sa udržuje optimálna teplota hlavným dôvodom
týchto opatrení sú veľké teplotné rozdiely na Marse medzi dňom
a nocou(cca. 113 stupňov Celsia); v porovnaní so Zemou je to
asi 10 krát väčší teplotný rozdiel
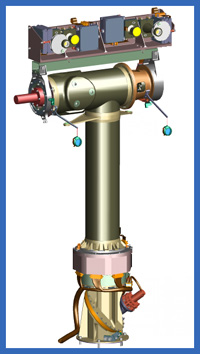
- krk
a hlava:
držiak na kameru umožňuje roverovi ľudský pohľad; kamera je
vo výške 1,4m
- oči a dalšie
zmysly: sú to kamery a iné nástroje, ktoré dodávajú roverom
informácie o prostredí; každý rover má 9 očí: 6 kamier pomáha
navigácii a 3 uskutočňujú prieskum
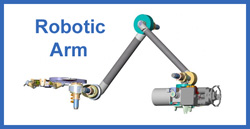
- rameno:
drží a manévruje s nástrojmi, je ohybné v troch bodoch=3 stupne
voľnosti(plece, lakeť a zápästie), môže sa pohybovať v horizontálnom
a vertikálnom smere a môže sa otáčať
- kolesá
a "končatiny": časti na pohyb, rover má 6 kolies,
z ktorých každé má vlastný pohon; dve predné a dve zadné kolesá
majú aj vlastný otáčací motor, čo im umožňuje otáčať sa o 360
stupňov; dizajn roverov je podobný ako Sojourner rover v misii
Pathfinder; maximálna rýchlosť, ktorú môže dosiahnuť, je 5cm/s.
Rover je však riadený softvérom, ktorý zabezpečí to, že po každých
10s jazdy sa zastaví, aby preskúmal prejdený terén a po 20s
pokračuje ďalej, takže priemerná rýchlosť, ktorú dosiahne, je
1cm/s.
- energia:
baterky a solárne panely, ktoré vygenerujú 140W za 4 hodiny,
pokiaľ na ne svieti slnko; spotreba rovera je asi 100W; systém
obsahuje aj dve dobýjateľné baterky, ktoré dodávajú enrgiu,
keď nesvieti slnko
- komunikácia:
vysokovýkonová a nízkovýkonová anténa, ktoré slúžia na "hovorenie"
- vysielanie a "počúvanie" - prijímanie. Nízkovýkonová
anténa môže prijímať a vysielať vo všetkých smeroch, anténa
prenáša rádiové vlny do DNS na Zemi. Rovery však môžu posielať
informácie aj družiciam obiehajúcim okolo Marsu, odkiaľ sú potom
prenesné na Zem.
|
 |
Pristávanie na Mars |
 |
Vychádzajúci rover |
 |
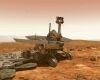
Rover na Marse |
 |
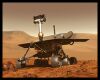
Rover blížiaci sa k bodu
svojho záujmu |
 |
Gesevov kráter (miesto,
kde pristál prvý rover) |
 |
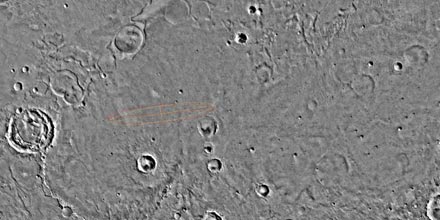
Meridian Palnerum (miesto,
kde pristál druhý rover) |
 |
Neporušená lagúna
hollow |
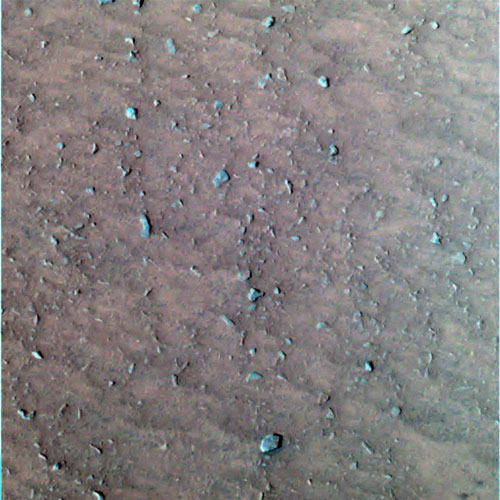
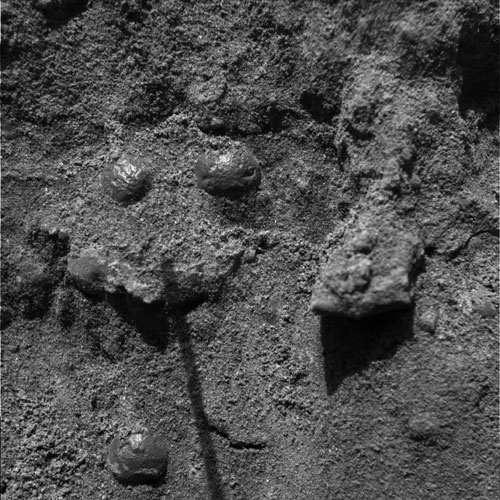
| Obázky zachytené
roverom: |
|
{kind=link}
{kind=link}