Chápadlo

Cieľom projektu je vytvorenie inteligentného robotického ramena umožnujúceho uchopiť a zdvihnúť predmet vzhľadom na požiadavku z nadradeného systému.
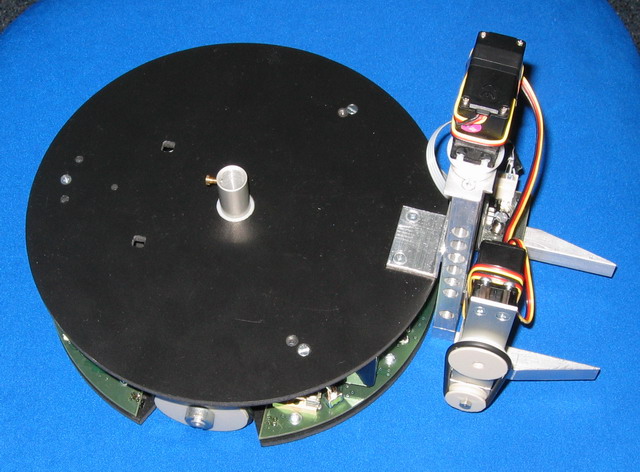
Ako pohonné jednotky chápadla boli vybraté modelárske servá Hitec HS322HD, ktoré boli modifikované (odstránená spätná väzba, odstránená mechanická záražka). Na výstupy serv sú primontované závitové tyče, ktoré umožňujú zovretie a zdvih chápadiel. Riadiacou jednotkou tohto robota je jednočipový 8bitový mikroprocesor AT90S2313, ktorý ovláda servá, komunikuje s nadradeným systémom a spracováva aj ďalšie signály z optických závor a snímacích odporov. Chápadlo nemá vlastný zdroj energie, napájanie je realizované pomocou konektora, na ktorom sú vyvedené aj komunikačné piny.
Kliknite na jednotlivé obrázky pre väčšiu verziu.