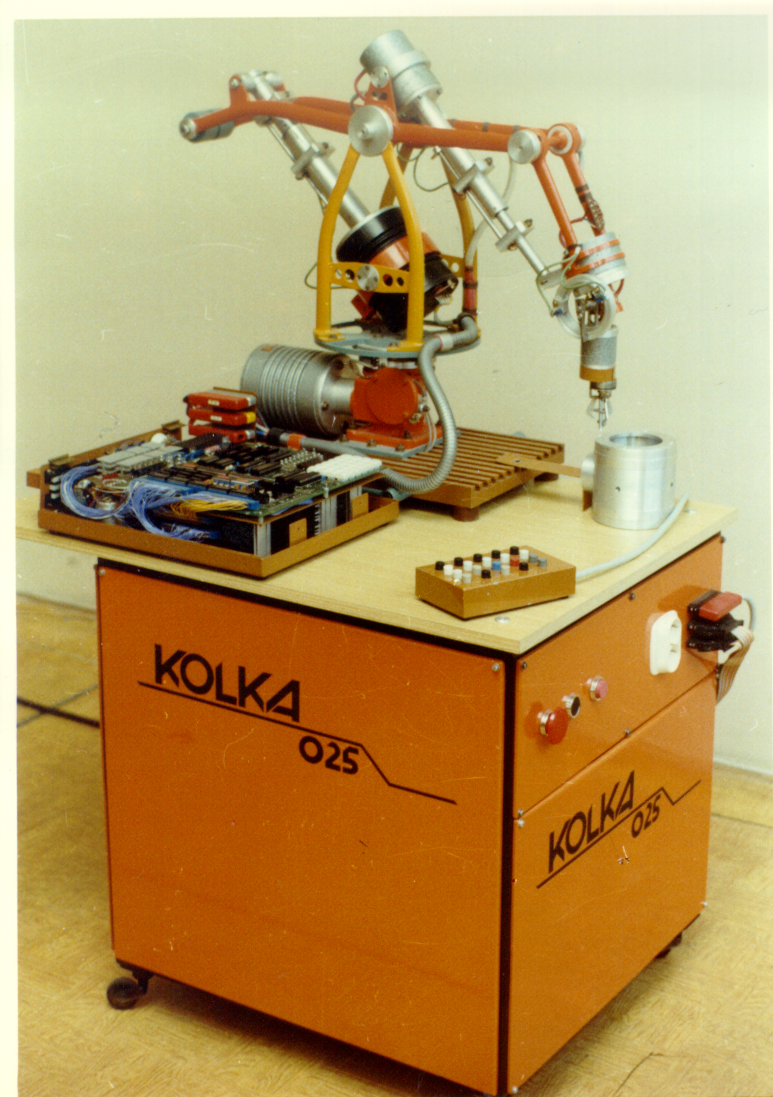
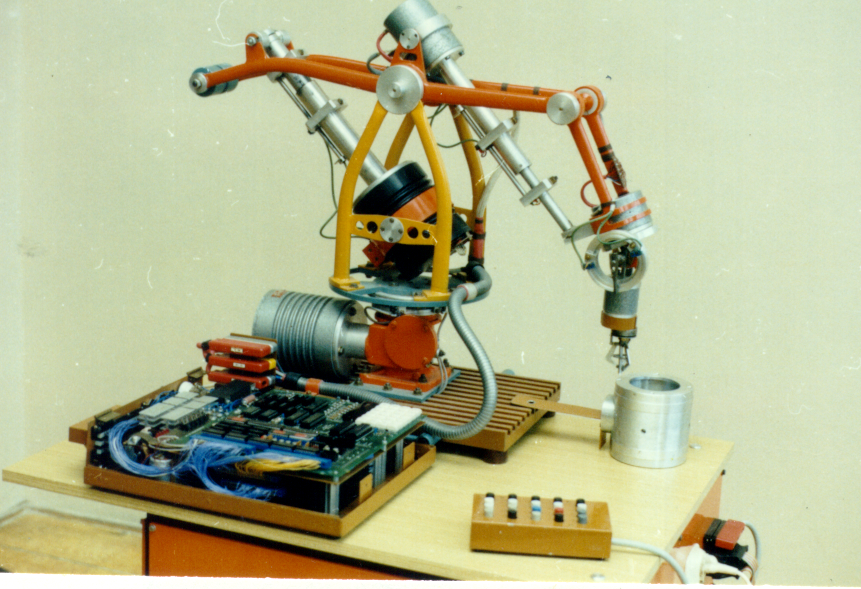
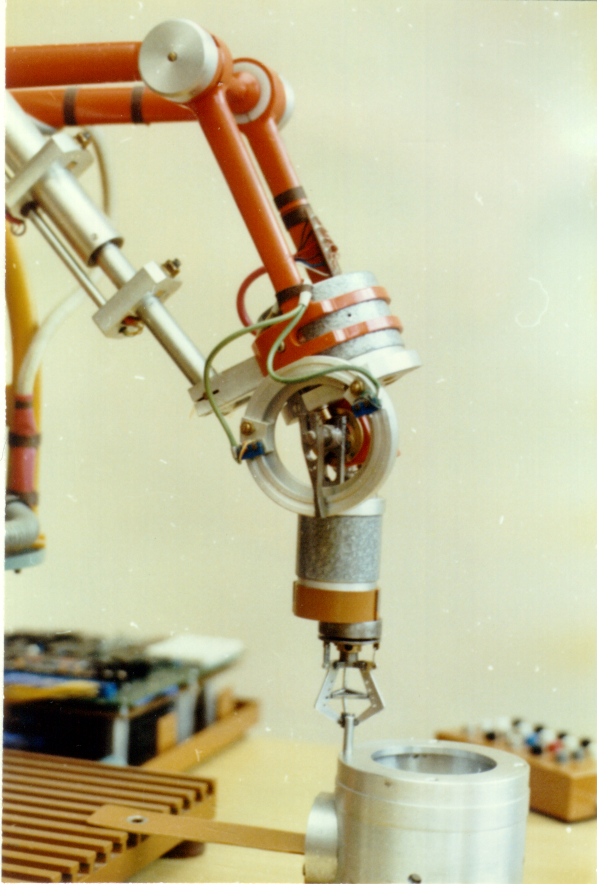
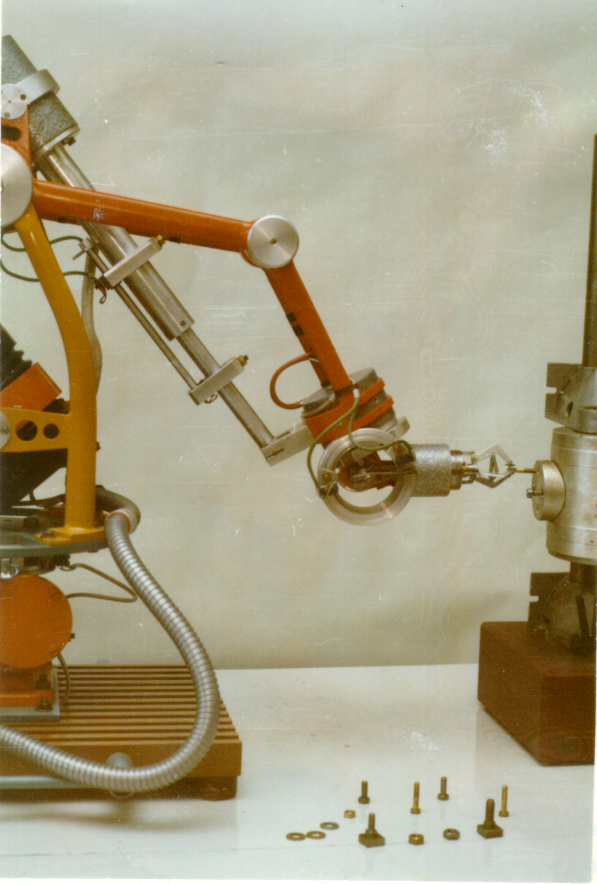
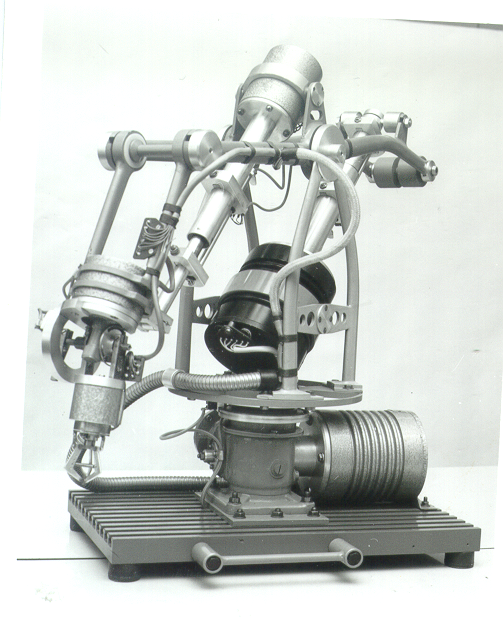
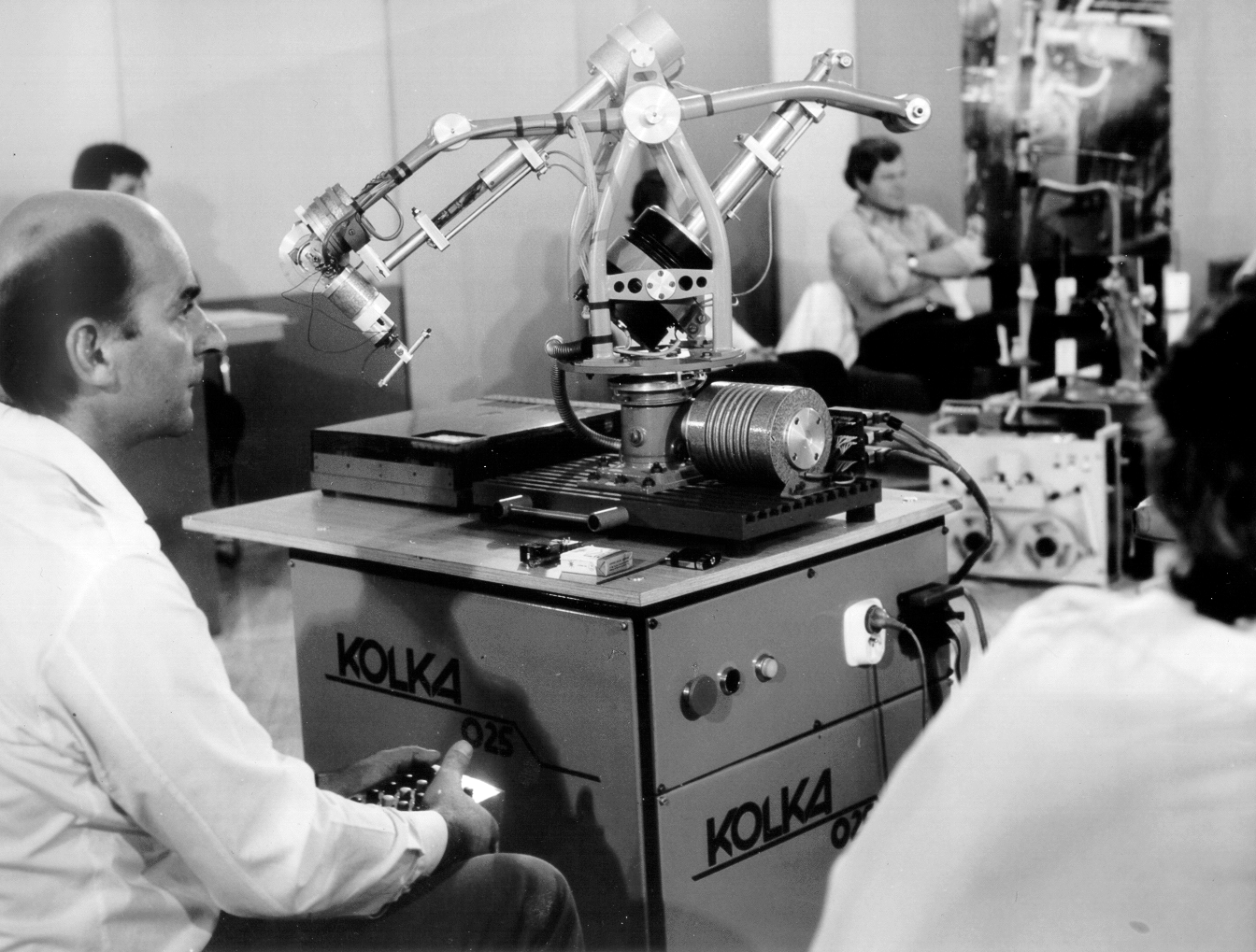
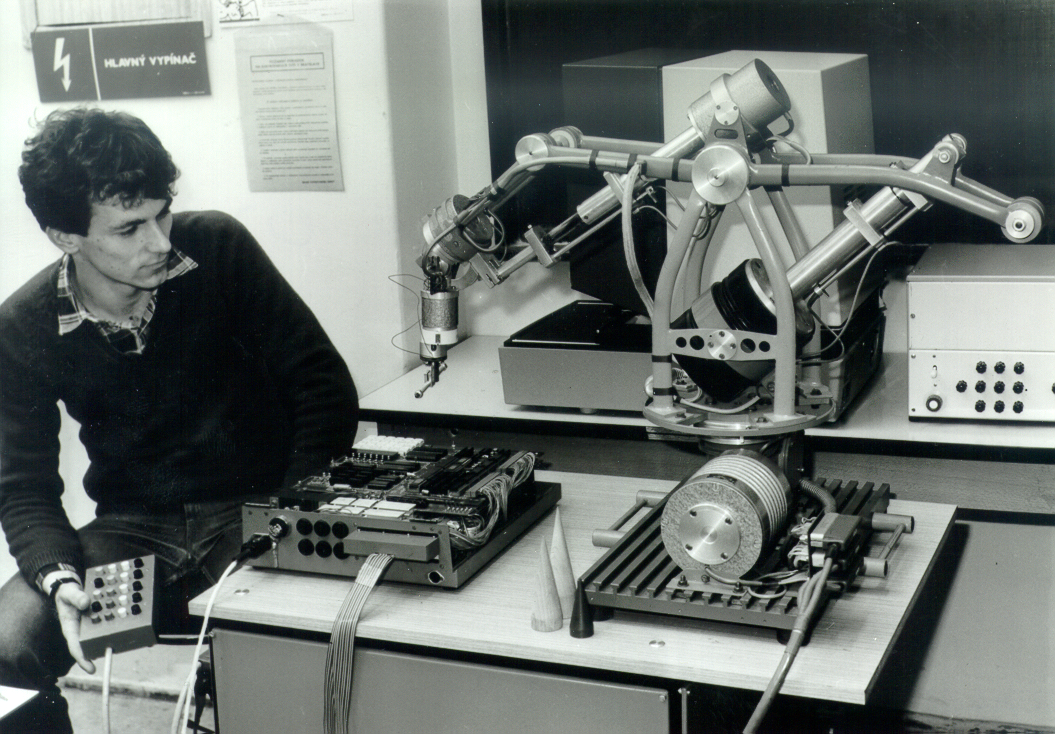
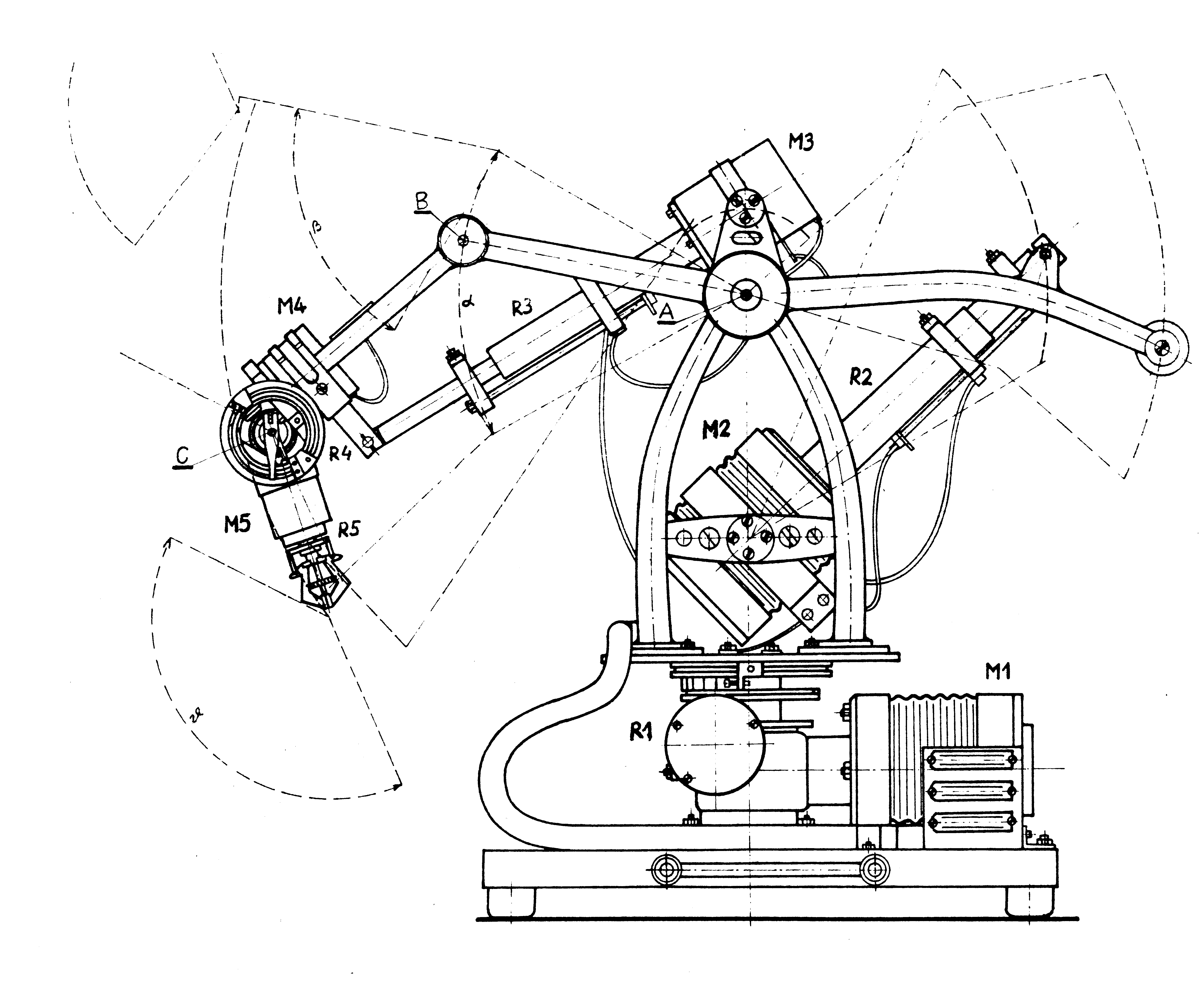
Robot má celkove 5 stupňov voľnosti, pričom 6. stupeň voľnosti je reprezentovaný elektromagneticky ovládanou technologickou hlavicou.
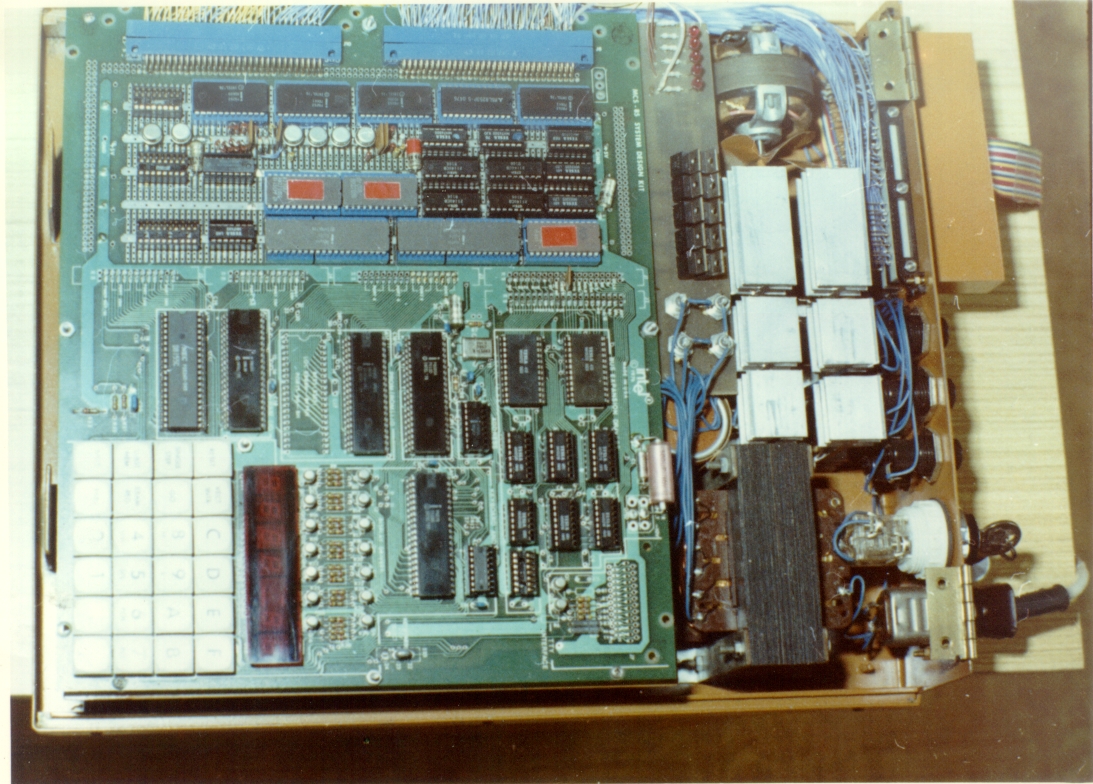
Spočiatku bol robot riadený počítačom RPP-16S, ale čoskoro bol tento ťažkopádny sytém nahradený mikropočítačom s mikroprocesorom Intel 8085. Samotný riadiaci program zaberá 3 kB pamäte, pričom riadenie jednotlivých krokových motorov sa uskutočňuje cez časovače Intel 8253.
Požadovanú trajketóriu chápadla robota možno získať učením. Učenie robota je vykonávané operátorom cez klávesnicu pod riadením riadiaceho programu. Riadiaci program vytvára pri učení plán pohybu, ktorý okrem údajov o zmenách polohy a rýchlostach jednotlivých pohonov obsahuje aj údaje o celkovej rýchlosti pohybu robota v jednotlivých úsekoch trajektórie, stav chápadla a údaje o prípadných dĺžkach čaknia v určitých, voliteľných bodch trajektórie.
Riadiaci program tiež podľa plánu phybu riadi realizáciu naučenej trajektórie a tiež umožňuje nahrať naučenýplán na magnetickú pásku a naopak.
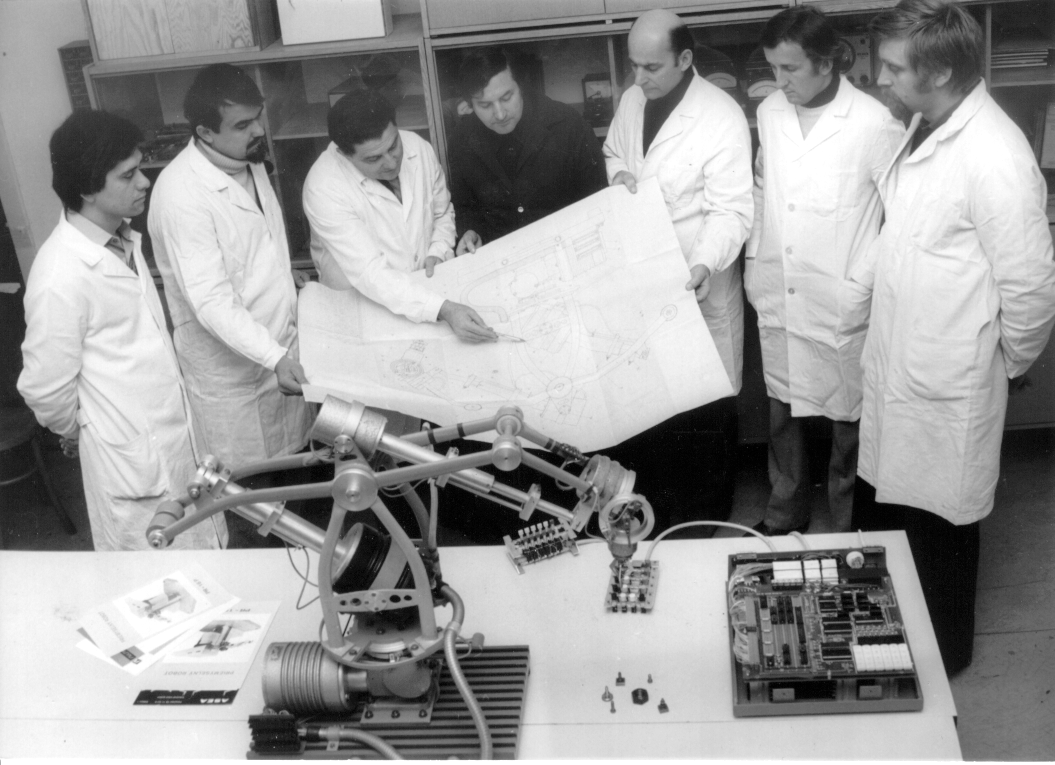
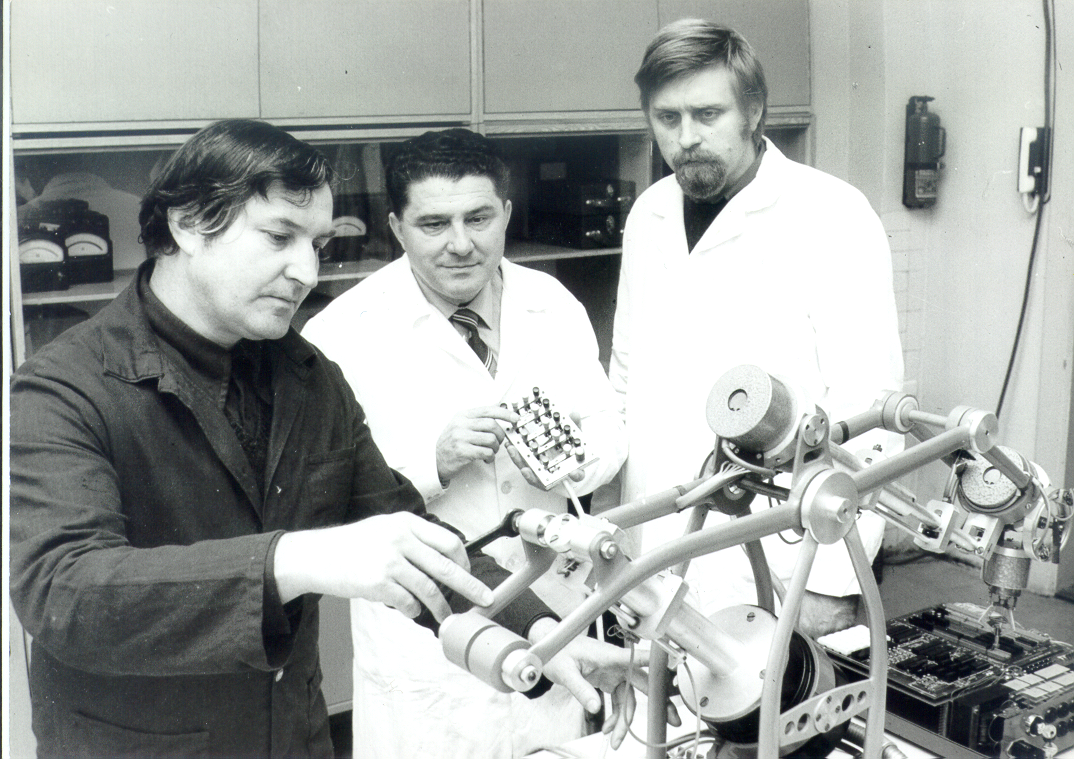
Robot je koncipovaný ako pedagogický s možnosťou jeho zaradenia do modelového robotického pracoviska.
V tejto konfigurácii bol vystavený na III. Medzinárodnej výstave priemyslových robotov ROBOT '82 vo februári 1982 v Brne, kde získal najvyššie ocenenie za exponát z nevýrobnej sféry - Čestné uznanie.
Vonkajšie tvarové riešenie vytvára napriek otvorenej konštrukcii esteticky pôsobiacu učebnú ppomôcku, pričom odkrytosť nie je na úkor bezpečnosti. Toto tvarové riešenie je predmetom chráneného priemyselného vzoru č.16841. Okrem toho sa k robotovi viaže ďalších 6 patentov a autorských osvedčení.
© 2003 Richard Balogh
Posledná zmena: 27. novembra 2003.