Lorry

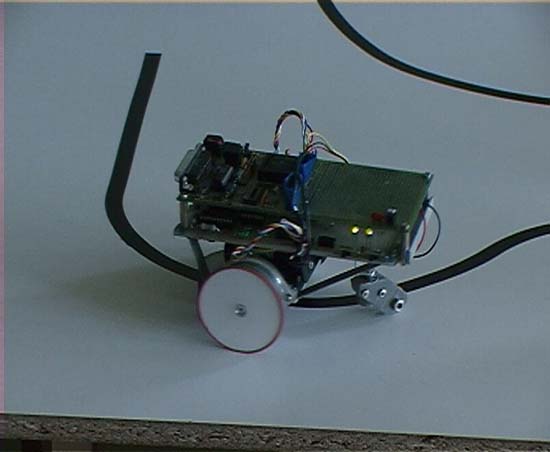
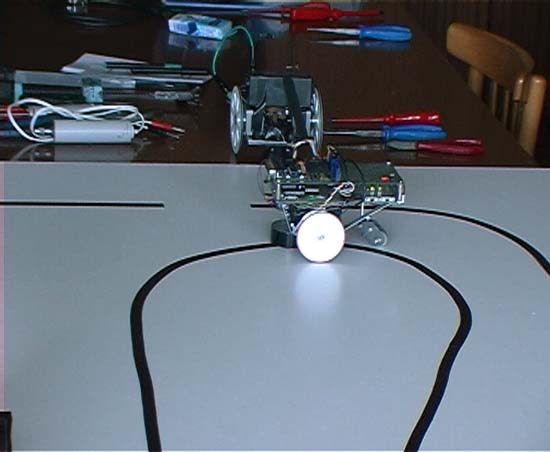
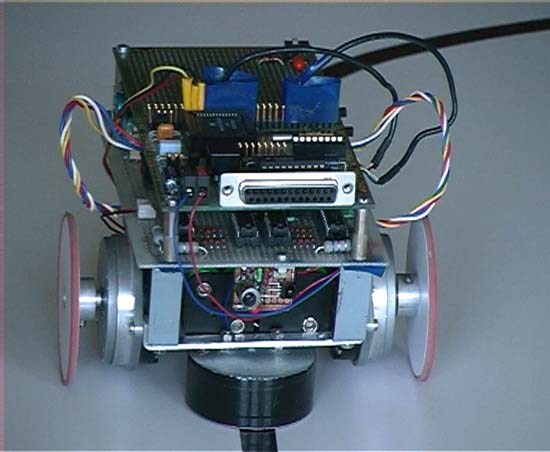
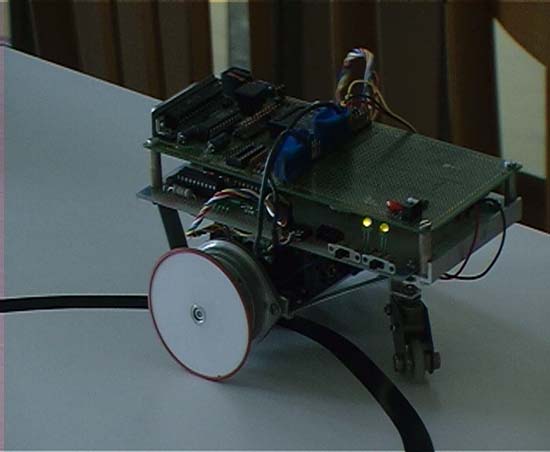
Robot Lorry bol skonštruovaný pre účinkovanie v súťaži mobilných robotov v kategórii Pathfollower. Vychádza z tradičnej kinematickej koncepcie trojkolky s diferenčným riadením dvoch kolies a tretím podporným kolieskom. Robot dokáže sledovať čierny čiaru na bielom podklade, pričom na sledovanie využíva spojitý P-regulátor, ktorý zabezpečuje plynulé sledovanie čiary. Výhody tejto regulácie sú zreteľne vidieť počas prevádzky, keď robot nekmitá okolo čiary, ale ju plynule sleduje a tak dosahuje vyššiu kvalitu sledovania čiary. Informáciu o polohe čiary získava z trojice fototranzistorov cez A/D prevod.
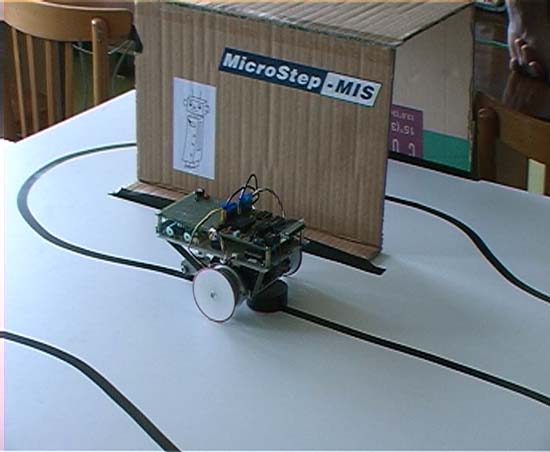
Na trati zvládne prerušovanú čiaru, zmenu svetelných podmienok i obchádzanie prekážok, ktoré sú v ceste. Detekcia prekážok je bezkontaktná na báze IR. Ako riadiaci člen je použitá školská doska s mikroprocesorom Motorola HC11E9, ktorý možno programovať pomocou sériovej linky priamo z počítača. Robot má ďalej reguláciu prúdu vo fázových vinutiach, bipolárne riadenie krokových motorov. Maximálna arýchlosť je okolo 25cm/s.
Lorry vo vrcholnej forme počas prehliadky v závere robotických prázdnin 2001.