Snímače
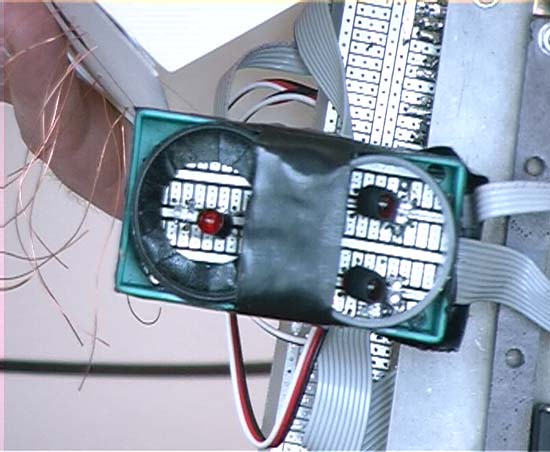
Robot obsahuje 5 svetlocitlivých snímačov ale súčasná verzia programu
využíva iba 3 snímače. Aby sa obmedzil rušivý vplyv okolitého svetla, sú
umiestnené v puzdrách od kinofilmov. Snímač pozostáva z LED diódy a
fototranzistora. Fototranzistor reaguje na intenzitu odrazeného svetla z LED
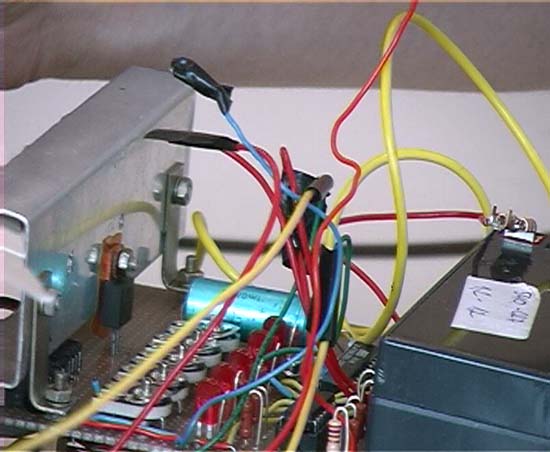
diódy. Jeho výstup je pripojený na operačný zosilovač pracujúci ako
komparátor. Ak sa pod snímačom nachádza biela plocha dobre odrážajúca svetlo
LED diódy,tranzistor je otvorený. Keď snímač prejde na čiernu čiaru,
tranzistor sa uzavrie a výstup komparátora sa preklopí. Pre každý snímač je
možné nastaviť jeho citlivosť trimrom umiestnenom na doske plošného spoja.