SBot

Cieľom projektu je vytvorenie jednoduchého mobilného podvozku (relatívne lacného, ľahko postaviteľného), ktorý aj dokáže realizovať jednoduché presuny.
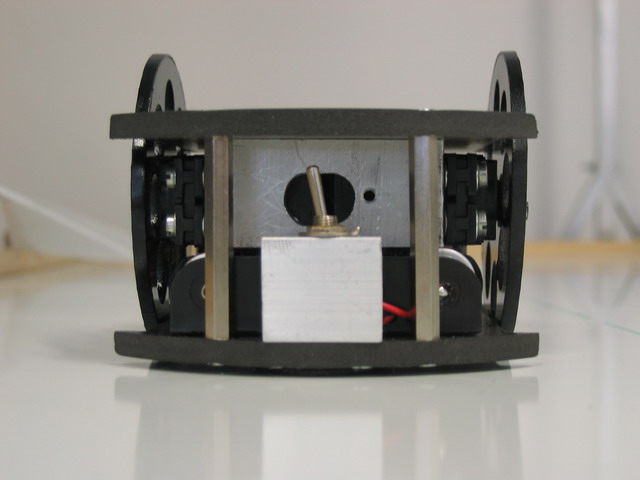
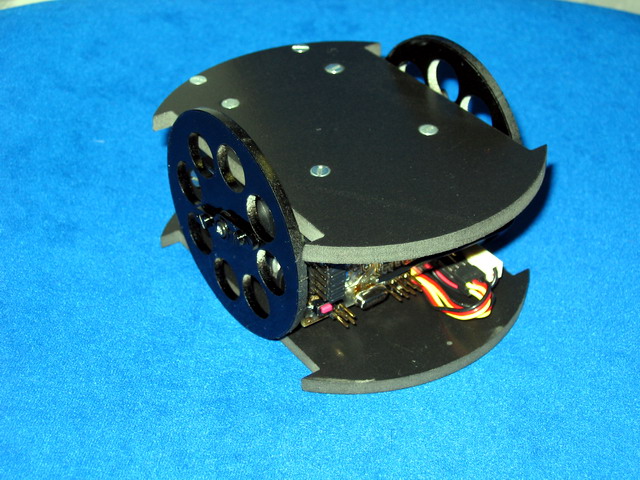
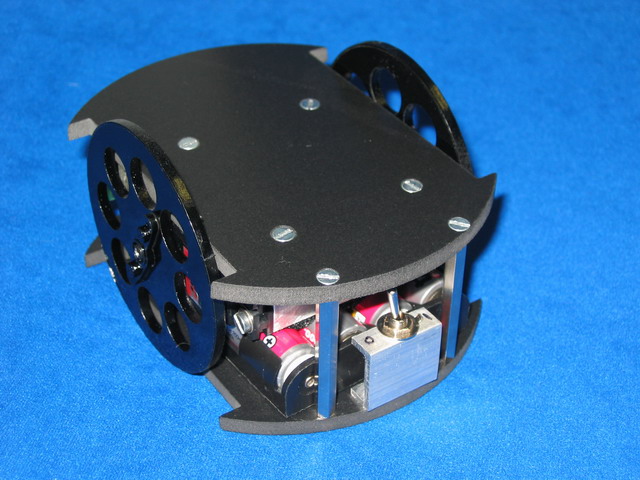
Z hľadiska konštrukcie sa jedná dvojkolesový vozík s obidvoma kolesami pohananými a dvoma podperami, aby sa vozík neprevrátil. Hnacie ústrojenstvo je tvorene modelárskymi servami Hitec HS322HD, ktoré su modifikované a upravené(odstránená spätná väzba, odstránená mechanická záražka). Priamo na výstupy zo serv sú primontované kolieska. Riadiacou jednotkou tohto robota je jednočipový 8bitový mikroprocesor ATmega8, ktorý ovláda servá, komunikuje s okolím pomocou BlueTooth modulu a spracováva aj ďalšie signály, ktoré môžeme priviest na niektoré jeho voľné porty. Samozrejmosťou je snímanie stavu napätia batérie. Zdrojom energie robota sú 4 NiMH akumulátory veľkosti AA o kapacite 2000mAh.
Príkazy pre robota sa dajú poslať priamo pripojením na seriový port PC, alebo pomocou BlueTooth modulu firmy Infineon. Pomocou daných modulov sa vytvorí virtuálna seriová linka a pripojením na túto virtuálnu sériovu linku môžeme ovládať robota v jeho pohybe.
Kliknite na jednotlivé obrázky pre väčšiu verziu.



 1.5MB, 0:11min
1.5MB, 0:11min

