SID

Cieľom projektu je riadenie pohybu mobilného robota v prostredí s prekážkami na základe informácií z externého vizuálneho systému. Robot má po zadaní požadovaného cieľového bodu sledovať navrhnutú trajektóriu, pričom informáciu o aktuálnej polohe a prekážkach poskytuje vizuálny systém.
Systém pozostáva z dvoch základných častí. Je to samotný trojkolesový vozík SID (Super Intelligent Device) ovládaný diaľkovo pomocou vysielacích modulov a vizuálny systém s riadiacim programom, ktorý vyhodnocuje obrazovú informáciu, navrhuje optimálnu trajektóriu a riadi pohyb vozíka tak aby nedošlo ku kolízii s prekážkami.
Popis trojkolesového vozíka:
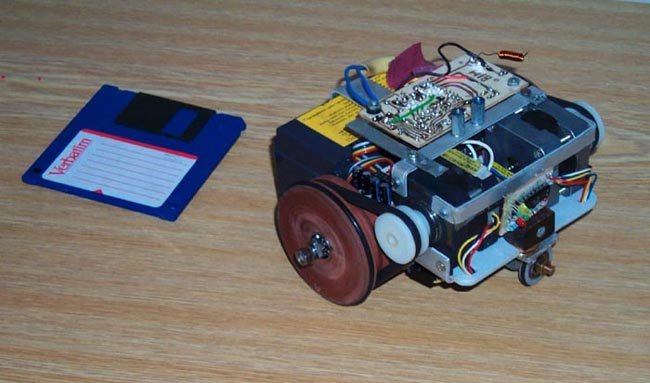
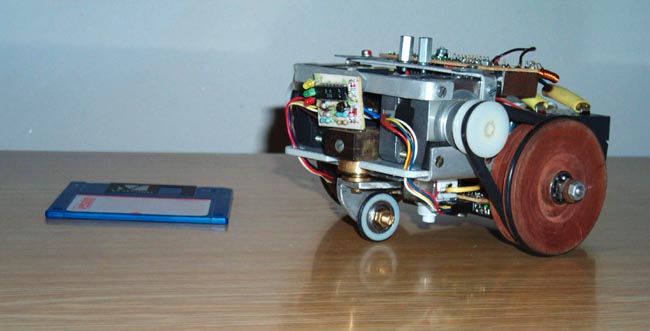
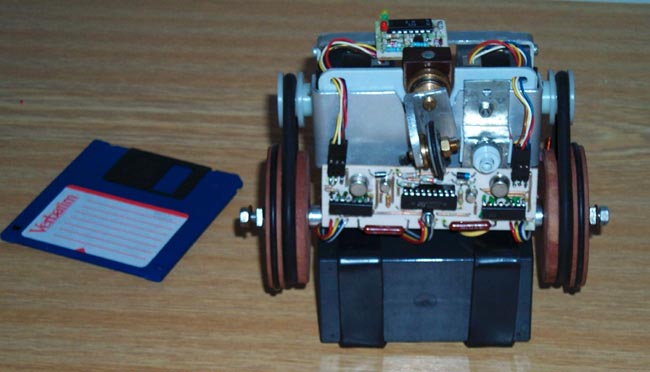
Jedná sa o dvojkolesový vozík s tretím oporným kolieskom. Kolesá sú poháňané krokovými motormi, pohyb vozíka je teda riadený rôznymi rýchlosťami oboch kolies. Riadenie je realizované pomocou monolitického mikropočítača ATMEL 89C2051. Vozík má kruhový pôdorys s priemerom cca 170 mm, zdroj energie (12V olovený akumulátor s kapacitou 1,2Ah) je umiestený na vozíku. Komunikácia s nadradeným systémom (v našom prípade PC) je pomocou rádiomodulov pracujúcich na frekvencii 433MHz. Vozík je možné riadiť v manuálnom režime pomocou myši alebo joysticka a v automatickom režime pomocou spätnej väzby od kamery.
Popis softwaru riadiaceho vozíka:
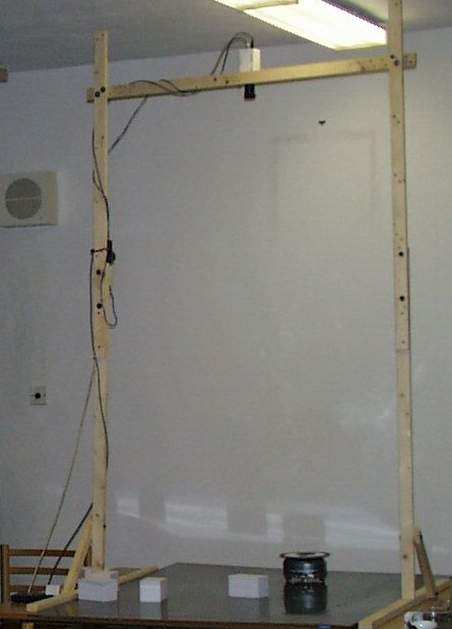
Nad pracovným priestorom je umiestnená CCD kamera (cca 2m nad plochou), ktorá monitoruje prostredie s prekážkami a osobný počítač vyhodnocuje súradnice a polohu vozíka. Kamera poskytuje televízny signál PAL a pomocou digitalizačnej karty získavame obraz = bitmapa 640x480, 256 farieb, čiernobiele. Na základe získanej globálnej mapy prostredia sa vygeneruje trajektória vedúca do cieľového bodu. Reguluje sa pohyb vozíka po vygenerovanej krivke. Riadenie prebieha v reálnom čase, odsníma sa prostredie a na základe odchýliek k želanej krivke sa posiela akčný zásah po sériovej linke cez rádiomoduly do vozíka. Kladie sa dôraz na optimálnu trajektóriu z hľadiska jej dĺžky a spojitú dráhu. Podmienkou je, aby pracovná plocha bola čierna, prekážky biele; toto obmedzenie súvisí z rozpoznávaním objektov na scéne. Program na ovládanie vozíka je vytvorený v programovom prostriedku Visual C++ 5.0 na platforme win32 pod operačným systémom WINDOWS NT, 95/98. Program umožňuje manuálne, automatické riadenie, spracovanie obrazu v reálnom čase.
- Kolesová trojkolka s dvoma poháňanými kolesami a jedným oporným kolesom
- Krokové motory (získané demontovaním z veľkých disketových mechaník)
- 12V olovený bezúdržbový akumulátor, 1.2Ah
- Polomer kolies: 33 mm
- Výška vozíka: 100mm
- Dĺžka vozíka: 160mm
- Šírka vozíka: 170 mm
- Rozvor kolies: 135mm
- Počet impulzov na jednu otáčku kolesa: 620
- Počet impulzov na otočenie vozíka o 360 stupňov: 1060
- Riadiaci počítač: 8bitový mikropočítač AT89C2051
- UHF dátové vysielacie/prijímacie moduly Radiometrix BiM-433-F
- PC P500 + monitor + software
- Grabovacia karta AV MASTER
- Stojan so CCD kamerou
- Ovladácí volant s pedálmi/Joystick
- Komunikačný modul
Kliknite na jednotlivé obrázky pre väčšiu verziu.