Robotnačka II

Cieľom projektu je vylepšenie kresliaceho mobilného robota Robotnačka I (pozri projekt Robotnačka I ). Vylepšenie sa ma týkať zjednodušenia sériovej výroby použitím dostupných častí, z ktorých sa robotnačka skladá.
Mobilný robot Robotnačka II je tak isto ako jeho predchodca Robotnačka I určený na podporu výučbového procesu v spojení so silným a flexibilným prostredím Imagine Logo vytvoreným na Katedre základov a vyučovania informatiky UK v Bratislave.
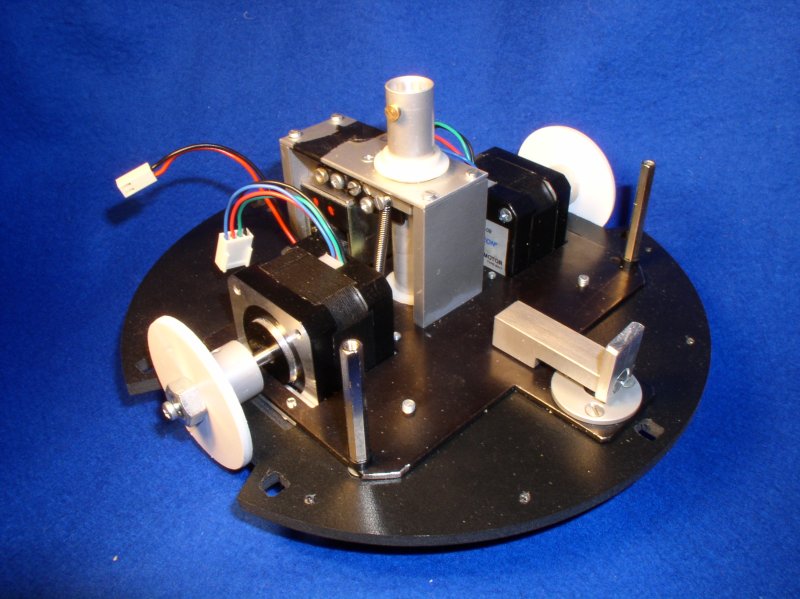
V tejto druhej verzii sme znova použili osvedčenú konštrukciu – trojkolesový vozík s dvoma pohaňanými kolieskami a tretím oporným. Ako pohony sme použili krokové motory firmy MICROCON, ktoré pracujú v unipolárnom osemtaktnom režime s počtom krokov na jednu otáčku 800. Je implementovaný rozbeh a dobeh, aby nedochádzalo k strate krokov. Riadenie týchto motorov je bez spatnej väzby, čiže je to otvorená štruktúra.
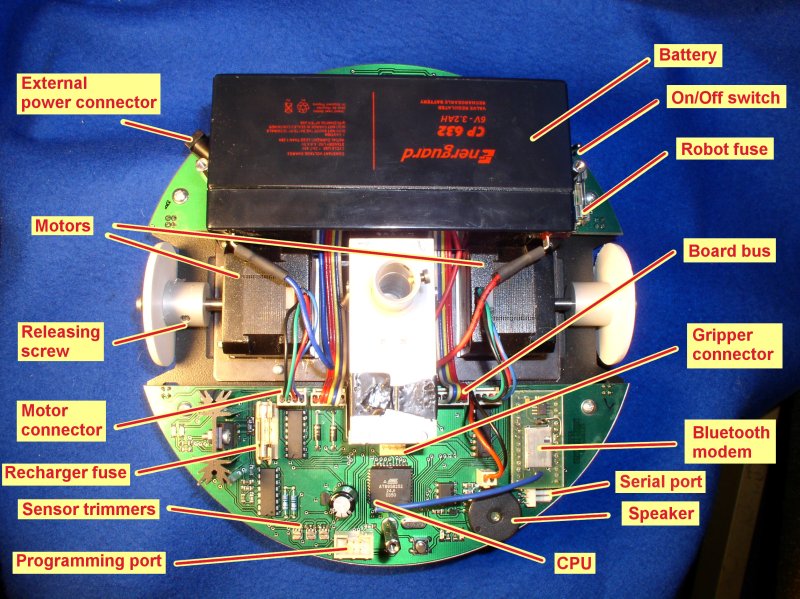
Riadiacou časťou robotnačky je mikroprocesor firmy ATMEL AT89S8252, ktorý umožňuje programovanie „za jazdy- ISP“. Okrem motorov obsluhuje daný mikropočítač solenoid s magnetom, ktorý slúži na pohyb pera hore dole (rozdiel oproti verzii I, kde bol použitý motorček), ďalej obsluhuje komunikačný BlueTooth modul od firmy INFINEON, ktorý zabezpečuje komunikáciu s nadradeným PC. Okrem týchto vecí sú na robotnačke zakomponované nabíjačka a šesť senzorov umiestnených na spodnej časti, umožňujúcich robotnačke rozoznať kraj stola alebo dosky. Nabíjačka umožňuje pomocou sieťového adaptéra dobíjať interný 6V 3.3Ah Pb akumulátor.
Stručný popis komunikácie:
Použité BlueTooth moduly majú implementovanú HCI vrstvu, nad ktorou sme
vytvorili všetky potrebne vrstvy, aby sa nám tváril naš modul ako virtuálna sériová
linka. Po tejto inicializácii sa môžeme na Robotnačku II pripojiť z ľubovolného
terminálu. Okrem týchto vrstiev sme vytvorili jednoduchý protokol pomocou ktorého
môžeme ovládať pohyb robotnačky, poprípade sa pýtať robotnačky na stav senzorov
a stav napätia akumulátora. Použitie BlueTooth modulov umožňuje z jedného
počítača ovládať viacero Robotnačiek bez toho, aby dochádzalo ku komunikačnej
kolízií.
- Kolesová trojkolka s dvoma poháňanými kolesami a jedným oporným kolesom
- Krokové motory MICROCON SL17
- Solenoid s magnetom
- 6V 3.3Ah bezúdržbový Pb akumulátor
- Priemer kolies: 50 mm
- Rozvor kolies: 180mm
- Výška vozíka: 68mm
- Priemer vozíka: 210mm
- Šírka vozíka: 200 mm
- Počet impulzov na otočenie vozíka o 360 stupňov: 2880
- Riadiaci počítač: 8bitový mikropočítač AT89S8252
- Bluetooth modul firmy INFINEON
Kliknite na jednotlivé obrázky pre väčšiu verziu.
 |
 |
 |
 |

