new "oleobject [comname cv4logo name cv]
cv'show cv'hide cv'show
cv'source "cam 0
alebo videosekvencia:
cv'source "avi "hello.avi
prípadne statický obrázok:
cv'source "file "tomas.jpg
ktorý môže byť downloadnutý aj z Internetu (ak sme na sieti):
cv'source "url "|http://www.bioinformatics.uwaterloo.ca/~tvinar/tomas.jpg|
Ak sa obrázkový súbor mení a chceme, aby sa menil i v našom okne, použijeme:
cv'source "livefile "tomas.jpg
alebo:
cv'source "liveurl "|http://www.uakom.sk/kamera/jpeg/bbb.jpg|
Rýchlosť aktualizácie môžeme určiť podľa potreby:
cv'updaterate 10 ; 10-krát za sekundu
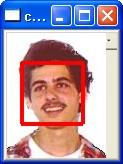
Komopnent umožňuje rozpoznávať tváre (alebo iné charakteristické vzory podľa natrénovaného predpisu):
Rozpoznávanie zapneme, vypneme a zoznam tvárí získame pomocou:
cv'tracking "on cv'tracking "off print first parse cv'getfaces
Takýmto spôsobom sa dá riadiť robot:

pričom Cv4Logo sleduje polohu tváre a podľa jej zmeny stanovuje polohu robota. Zmeniť popis rozpoznávaného vzoru možno pomocou príkazu:
cv'trackingparameters
"|haarcascades\haarcascade_upperbody.xml| ; resp. iný súbor so vzorom
Ak obraz obsahuje scénu s kontrastnými mnohouholníkmi, napr.
môžeme ich nájsť pomocou:
print cv'detectpoly "false ; pričom detekcia prebehne podľa parametrov, ktoré sa dajú nastaviť:
cv'detectpolyparam threshold sensitivity minperimeter maxperimeter
kde threshold udáva rozhranie medzi bielou a čiernou, sensitivity určuje aká malá strana relatívne k vežkosti mnohouholníka sa má brať v úvahu, minperimeter a maxperimeter určuje prípustný interval pre rozmery hžadaných monohouhožníkov.
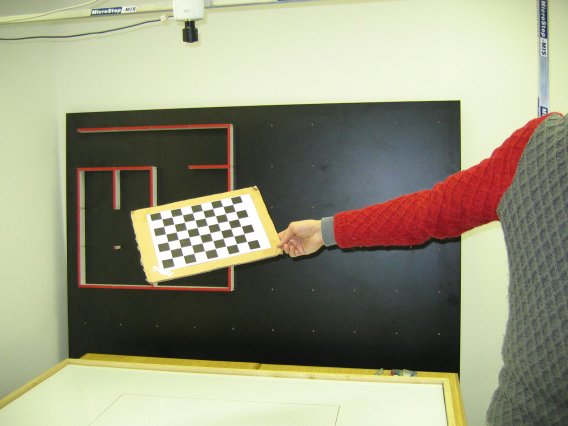
Obraz z bežných kamier nie je rovnomerný, ale natiahnutý, pričom rovné priamky
sa zobrazujú do kriviek. Ak chceme obraz využiť na presnejšie informácie o prostredí
(napríklad pre lokalizáciu robota alebo pre určenie rozmerov v geometrickej úlohe),
kameru je potrebné nakalibrovať:
Sada príkazov obsluhuje kalibráciu a orezanie obrazu podľa štandardných algoritmov. Aktuálny obraz sa dá uložiť do súboru alebo do pamäte na neskoršie vyvolanie a použitie. Lokálne prístupný obraz (napríklad z USB kamery) môže používateľ sprístupniť ostatným staniciam na lokálnej sieti alebo na Internete. Po zapnutí obrazového servera:
cv'frameserver "on
Môže vzdialený používateľ preberať ten istý obraz tak, že ako svoj zdroj určí IP-adresu obrazového servera:
cv'source "remote "192.168.145.146
Okrem toho si používatelia môžu posielať správy v režime klient-server:
Server:
make "servId cv'listen 12345 ; alebo iné číslo portu
Klient:
make "connId cv'connect "192.168.145.62 12345
Server:
make "client1 cv'accept :servId
A ďalej rovnocenne z oboch strán:
cv'send connection_id message
print cv'receive :connId
Napríklad:
cv'send :client1 "hello
cv'send :connId "hiThere!
print cv'receive :client1
Pozrite si ReadMe.txt s podrobným popisom komopnentu Cv4Logo.