
Seminár zo sveta robotiky
Partneri
Za podporu seminára ďakujeme


Chcem byť informovaný:
Námety na témy a prednášajúcich:
Archív -->
PLÁN NA NAJBLIŽŠIE OBDOBIE:
- 4. 3. 2026, 18:00-19:00 (74. prednáška)Vratislav Beneš: Fravebot vyvíja budúcnosť autonómneho poľnohospodárstva
 Fravebot predstavuje inovatívnu modulárnu platformu určenú pre autonómnu prevádzku v moderných produkčných skleníkoch.
Spoločnosť vyvíja robotické systémy, ktoré kombinujú špičkovú priemyselnú automatizáciu s pokročilou umelou inteligenciou
na zabezpečenie nepretržitého monitoringu a zberu plodín. Ich kľúčové riešenie využíva vysokocitlivé kamery a neurónové
siete na včasnú detekciu škodcov a chorôb, čo pestovateľom umožňuje zasiahnuť cielene a výrazne znížiť používanie chemických
postrekov. Vďaka modulárnej konštrukcii a schopnosti samostatne sa pohybovať po koľajových systémoch skleníkov dokážu tieto
roboty pracovať v režime 24/7 bez potreby ľudského zásahu a efektívne rieši globálny nedostatok pracovnej sily v agrosektore.
V prednáške okrem iného zaujme implementácia deep learning modelov priamo na zariadení (on-device inference), ktoré dokážu
s vysokou presnosťou klasifikovať rastlinné patogény a stupeň zrelosti plodov bez nutnosti neustáleho cloudového pripojenia.
Fravebot predstavuje inovatívnu modulárnu platformu určenú pre autonómnu prevádzku v moderných produkčných skleníkoch.
Spoločnosť vyvíja robotické systémy, ktoré kombinujú špičkovú priemyselnú automatizáciu s pokročilou umelou inteligenciou
na zabezpečenie nepretržitého monitoringu a zberu plodín. Ich kľúčové riešenie využíva vysokocitlivé kamery a neurónové
siete na včasnú detekciu škodcov a chorôb, čo pestovateľom umožňuje zasiahnuť cielene a výrazne znížiť používanie chemických
postrekov. Vďaka modulárnej konštrukcii a schopnosti samostatne sa pohybovať po koľajových systémoch skleníkov dokážu tieto
roboty pracovať v režime 24/7 bez potreby ľudského zásahu a efektívne rieši globálny nedostatok pracovnej sily v agrosektore.
V prednáške okrem iného zaujme implementácia deep learning modelov priamo na zariadení (on-device inference), ktoré dokážu
s vysokou presnosťou klasifikovať rastlinné patogény a stupeň zrelosti plodov bez nutnosti neustáleho cloudového pripojenia.
 Vratislav Beneš je generálnym riaditeľom a spoluzakladateľom spoločnosti Fravebot, kde vedie vývoj autonómnych
robotov riadených umelou inteligenciou pre poľnohospodársky sektor. Ako skúsený expert na robotiku prináša viac
než 20 rokov skúseností z automobilového priemyslu, v ktorom sa špecializoval na stroje pre automatizovanú
kontrolu kvality. V roku 2022 sa spojil s pestovateľom Matějom Sklenářom, aby preniesol toto priemyselné
high-tech know-how do precízneho poľnohospodárstva prostredníctvom monitorovacích a zberových robotov.
Pod jeho vedením Fravebot úspešne expanduje naprieč Európou a poskytuje farmárom pokročilé dátové nástroje
na optimalizáciu zdravia rastlín a zvýšenie výnosov.
Vratislav Beneš je generálnym riaditeľom a spoluzakladateľom spoločnosti Fravebot, kde vedie vývoj autonómnych
robotov riadených umelou inteligenciou pre poľnohospodársky sektor. Ako skúsený expert na robotiku prináša viac
než 20 rokov skúseností z automobilového priemyslu, v ktorom sa špecializoval na stroje pre automatizovanú
kontrolu kvality. V roku 2022 sa spojil s pestovateľom Matějom Sklenářom, aby preniesol toto priemyselné
high-tech know-how do precízneho poľnohospodárstva prostredníctvom monitorovacích a zberových robotov.
Pod jeho vedením Fravebot úspešne expanduje naprieč Európou a poskytuje farmárom pokročilé dátové nástroje
na optimalizáciu zdravia rastlín a zvýšenie výnosov.
1. 10. 2025, 20:00, on-lineRobotour minikonferencia
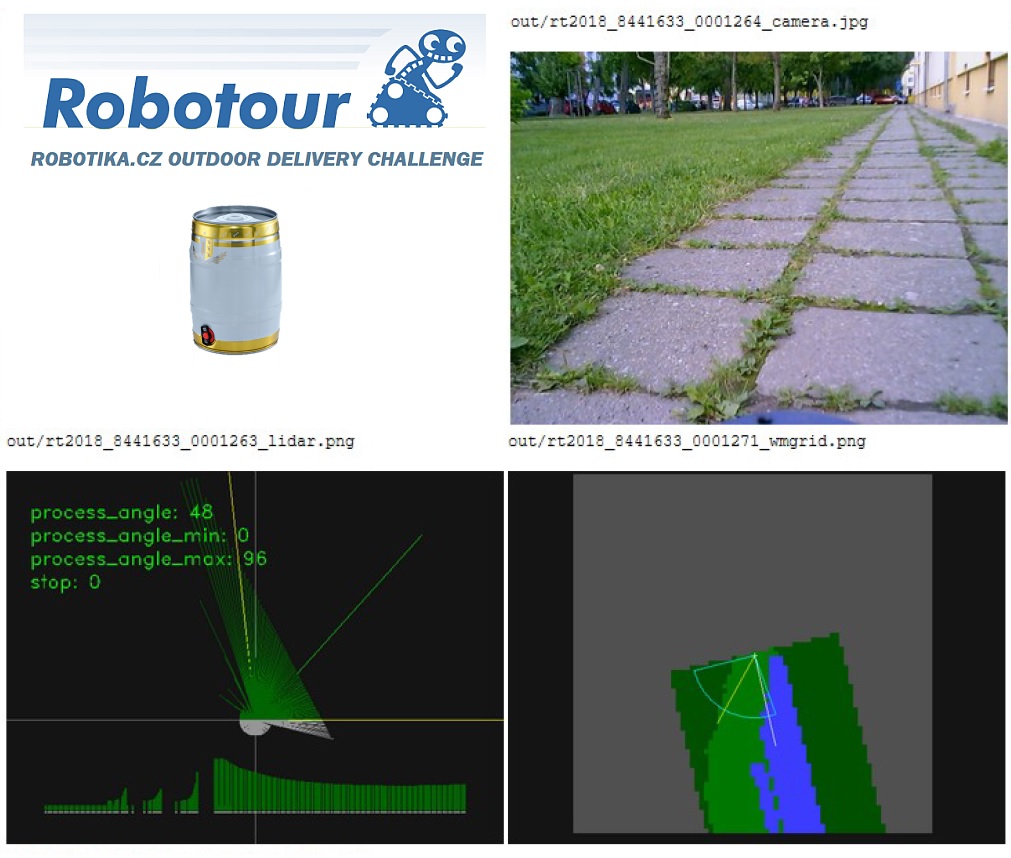 Robotour je už tradičná outdoorová súťaž autonómnych robotov, ktorí by mali dokázať odviezť v niektorom parku užitočný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie zúčastnených tímov z
práve skončeného ročníka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Začneme všeobecne o súťaži
ako takej, potom privítame jednotlivé tímy. Dozviete sa mnoho informácií, ktoré inde nenájdete, či už o konštrukcii robota
do vonkajšieho prostredia, o softvéroch na spracovanie obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia
stoviek malých praktických problémov, ktoré sa popritom vyskytli.
Robotour je už tradičná outdoorová súťaž autonómnych robotov, ktorí by mali dokázať odviezť v niektorom parku užitočný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie zúčastnených tímov z
práve skončeného ročníka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Začneme všeobecne o súťaži
ako takej, potom privítame jednotlivé tímy. Dozviete sa mnoho informácií, ktoré inde nenájdete, či už o konštrukcii robota
do vonkajšieho prostredia, o softvéroch na spracovanie obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia
stoviek malých praktických problémov, ktoré sa popritom vyskytli.
Viac informácií: na stránke Robotour
K dispozícii je videozáznam a slajdy.
5. 6. 2024, 17:30-19:00, AB-150, FEI STU (72. prednáška)Andrej Pauliny: Robotická ruka DexHand.
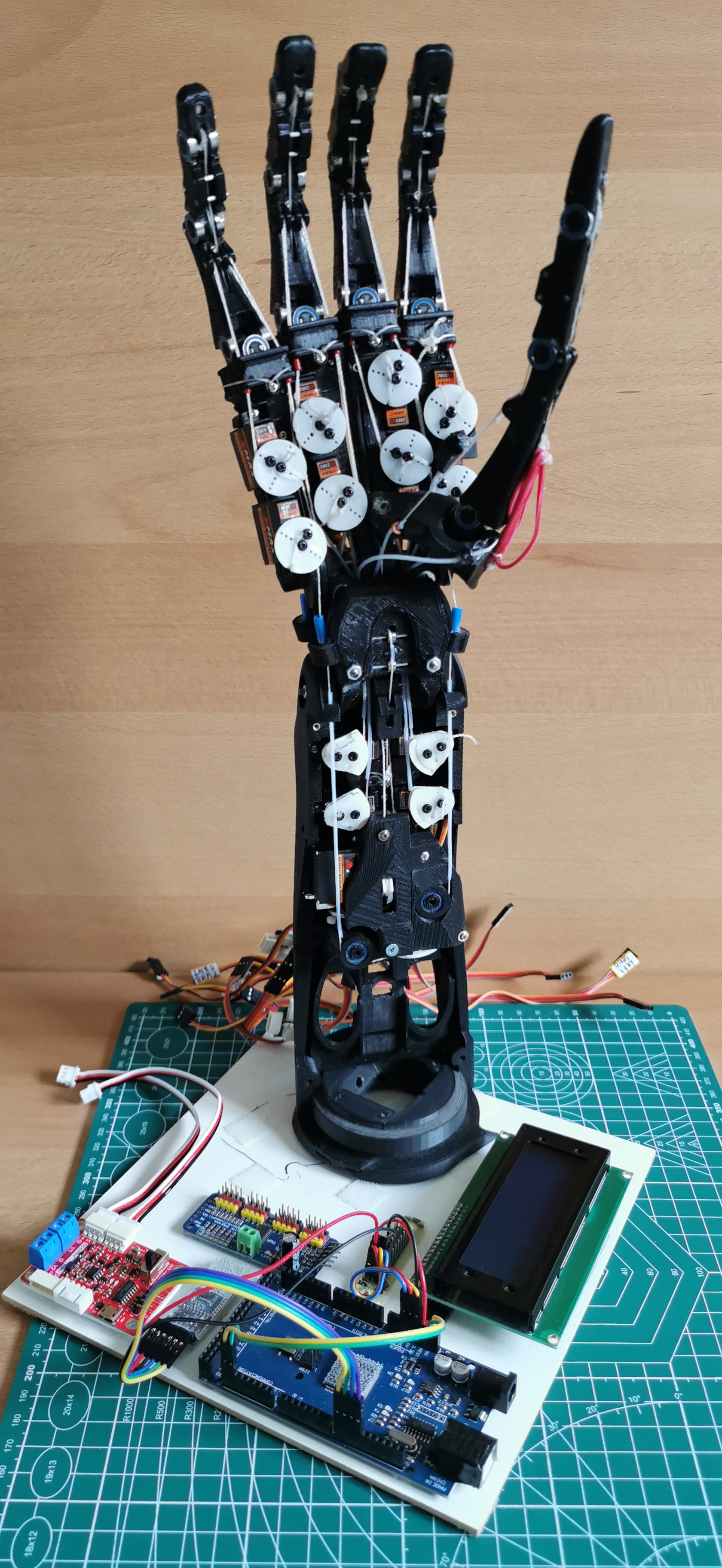 DexHand je lacná, open source, šikovná robotická ruka určená na výskum a vývoj humanoidných
robotov. Nadizajnoval ju a vypublikoval Rob Knihgt z
TheRobotStudio. Jej výroba trvala rok a pol. Bude predvedená v živej úkažke.
DexHand je lacná, open source, šikovná robotická ruka určená na výskum a vývoj humanoidných
robotov. Nadizajnoval ju a vypublikoval Rob Knihgt z
TheRobotStudio. Jej výroba trvala rok a pol. Bude predvedená v živej úkažke.
 Andrej Pauliny je itéčkár v zdravotníckom sektore, robotika je jeho hobby,
ktorému sa intenzívne venuje štvrť storočia. Zaoberá sa hlavne výrobou robotov pomocou
3D tlače (humanoid InMoov). Je pravidelným členom poroty na súťaži FIRST Lego Legue.
Andrej Pauliny je itéčkár v zdravotníckom sektore, robotika je jeho hobby,
ktorému sa intenzívne venuje štvrť storočia. Zaoberá sa hlavne výrobou robotov pomocou
3D tlače (humanoid InMoov). Je pravidelným členom poroty na súťaži FIRST Lego Legue.