
Seminár zo sveta robotiky
ARCHÍV SEMINÁRA:
- 3. 4. 2024, 17:30-19:00, FEI STU (71. prednáška)Rastislav Marko: Štvornohý robot Artaban
 Robotika sa pomaly presúva z výrobných hál medzi ľudí. Slovenská firma Panza Robotics vyvíja
robota, ktorý sa týmto smerom presúva na štyroch nohách. Ak máte chuť spoznať a dozvedieť sa
o autonómnom robotovi Artabanovi, radi vám ho predstavíme na tejto prednáške. Budeme sa
rozprávať o jeho vývoji, ako funguje a aké má využitie.
Robotika sa pomaly presúva z výrobných hál medzi ľudí. Slovenská firma Panza Robotics vyvíja
robota, ktorý sa týmto smerom presúva na štyroch nohách. Ak máte chuť spoznať a dozvedieť sa
o autonómnom robotovi Artabanovi, radi vám ho predstavíme na tejto prednáške. Budeme sa
rozprávať o jeho vývoji, ako funguje a aké má využitie.
Po prednáške je k dispozícii záznam na YouTube a slajdy z prezentácie.
 Rastislav Marko / CTO Panza Robotics
Rastislav Marko / CTO Panza Robotics
Štúdium začal v odboroch manažment (UNIBA) a mechatronika (STUBA). Neskôr získal nielen titul European Master on Advanced Robotics (EMARO) ale aj štipendium Jasso na diplomovú prácu v Japonsku so zameraním na umelú inteligenciu. Pôsobil aj v spoločnosti F&P Robotics vo Švajčiarsku ako člen hlavného vývojového tímu robotov pre čínsky a európsky trh. V súčasnosti vedie vývoj vo firme Panza Robotics.
- 6. 3. 2024, 17:30-19:00, FabLab (70. prednáška)Ivana Beňová: Ako multimodálne modely chápu aktivity: Tajomstvo porozumenia slovies a vizuálov.
 Porozumenie slovies a aktivít v robotike je jedným z kľúčových aspektov pre
vytvorenie efektívnej komunikácie medzi ľuďmi a robotmi, čo zlepšuje ich
schopnosť spolupracovať v rôznych situáciách. Na prednáške preskúmame probing
techniky, ktoré umožňujú detailné študovanie porozumenia slovies v multimodálnych
modeloch. Pokúsime sa teda odhaliť stupeň porozumenia multimodálnych modelov
ako napríklad BLIP, BLIP2 či FLAVA, a vyhodnotíme ich schopnosť rozlišovať
aktivity ľudí v rôznych kontextoch.
Porozumenie slovies a aktivít v robotike je jedným z kľúčových aspektov pre
vytvorenie efektívnej komunikácie medzi ľuďmi a robotmi, čo zlepšuje ich
schopnosť spolupracovať v rôznych situáciách. Na prednáške preskúmame probing
techniky, ktoré umožňujú detailné študovanie porozumenia slovies v multimodálnych
modeloch. Pokúsime sa teda odhaliť stupeň porozumenia multimodálnych modelov
ako napríklad BLIP, BLIP2 či FLAVA, a vyhodnotíme ich schopnosť rozlišovať
aktivity ľudí v rôznych kontextoch.
Po prednáške je k dispozícii záznam na YouTube.
 Ivana Beňová je výskumná asistentka a doktorandka pod vedením Mariána Šimka
a Jany Košeckej. Je súčasťou tímu pre spracovanie prirodzeného jazyka v
Kempelenovom inštitúte inteligentných technológií. Jej práca sa zameriava
hlavne na študovanie pochopenia a ukotvenia rôznych lingvistických aspektov
ako sú slovesá, či priestorové vzťahy v multimodálnych obrazovo-jazykových
modeloch.
Ivana Beňová je výskumná asistentka a doktorandka pod vedením Mariána Šimka
a Jany Košeckej. Je súčasťou tímu pre spracovanie prirodzeného jazyka v
Kempelenovom inštitúte inteligentných technológií. Jej práca sa zameriava
hlavne na študovanie pochopenia a ukotvenia rôznych lingvistických aspektov
ako sú slovesá, či priestorové vzťahy v multimodálnych obrazovo-jazykových
modeloch.
- 6. 2. 2024, 17:30-19:00, FabLab (69. prednáška)Michal Vavrečka: Jak učit robota složitým akcím.
 Prednáška pojednáva o tom, ako naučiť robota vybaveného elementárnymi akciami, zložitým akciám.
Ústrednou technológiou je v tomto kontexte hierarchický reinforcement learning. Trénovanie robota
je však časovo náročné. Preto sa nerobí so skutočným robotom, ale v simulátore, ktorý robotovi
a jeho prostrediu čo najvernejšie zodpovedá.
Prednáška pojednáva o tom, ako naučiť robota vybaveného elementárnymi akciami, zložitým akciám.
Ústrednou technológiou je v tomto kontexte hierarchický reinforcement learning. Trénovanie robota
je však časovo náročné. Preto sa nerobí so skutočným robotom, ale v simulátore, ktorý robotovi
a jeho prostrediu čo najvernejšie zodpovedá.
Po prednáške je k dispozícii záznam na YouTube
 Michal Vavrečka je asistentom na ČVUT v Prahe, venuje sa kognitívnej robotike v
Českom inštitúte informatiky, robotiky a kybernetiky.
Momentálne spolupracuje aj s Katedrou aplikovanej informatiky na Matfyze v Bratislave
v rámci projektu TERAIS.
Michal Vavrečka je asistentom na ČVUT v Prahe, venuje sa kognitívnej robotike v
Českom inštitúte informatiky, robotiky a kybernetiky.
Momentálne spolupracuje aj s Katedrou aplikovanej informatiky na Matfyze v Bratislave
v rámci projektu TERAIS.
- 10. 1. 2024, 17:30-19:00, FabLab (68. prednáška)Pavel Petrovič, Matúš Granec, Peter Verčimák: Robot Jupiter a netradičné kategórie RoboCup Junior Slovensko: Home Education a Dron
 V tejto prednáške sa vďaka Paľovi Petrovičovi a jeho študentom dozviete viac o súťaži
Robocup Junior Slovensko a jej kateoriách Home Education a dron.
V tejto prednáške sa vďaka Paľovi Petrovičovi a jeho študentom dozviete viac o súťaži
Robocup Junior Slovensko a jej kateoriách Home Education a dron.
Po prednáške je k dispozícii záznam na YouTube.
 Pavel Petrovič je odborný asistent na Katedre aplikovanej informatiky FMFI UK v Bratislave,
kde viedol viacero záverečných prác a výučbových predmetov z oblasti robotiky, často sa venuje
popularizačným aktivitám a súťažiam.
Pavel Petrovič je odborný asistent na Katedre aplikovanej informatiky FMFI UK v Bratislave,
kde viedol viacero záverečných prác a výučbových predmetov z oblasti robotiky, často sa venuje
popularizačným aktivitám a súťažiam.
- 6. 12. 2023, 17:30-19:00, Fablab (67. prednáška)Adam Kukla: FIRST Global: Robotická súťaž, ktorá maže rozdiely
 Príďte sa dozvedieť viac o robotickej súťaži pre stredoškolákov, ktorá spája
každoročne viac ako 180 krajín sveta pri riešení globálnych výziev. Adam Kukla
a ďalší členovia FIRST Global Slovakia, o.z. budú hovoriť aj o čerstvo
vyhlásenom Slovenskom kole súťaže pre rok 2024, o mentoringu a o každoročnej
príprave tímu na reprezentáciu Slovenska na celosvetovom kole FIRST Global.
Príďte sa dozvedieť viac o robotickej súťaži pre stredoškolákov, ktorá spája
každoročne viac ako 180 krajín sveta pri riešení globálnych výziev. Adam Kukla
a ďalší členovia FIRST Global Slovakia, o.z. budú hovoriť aj o čerstvo
vyhlásenom Slovenskom kole súťaže pre rok 2024, o mentoringu a o každoročnej
príprave tímu na reprezentáciu Slovenska na celosvetovom kole FIRST Global.
Z prednášky je k dispozícii záznam na YouTube
 Adam Kukla je stredoškolský učiteľ fyziky a chémie. Robotike sa začal
venovať ako netechnický mentor reprezentácie Slovenska na prvom ročníku
celosvetového kola FIRST Global v roku 2017. Odvtedy sa snaží priniesť
šancu získavať skúsenosti a súťažiť v robotike čo najširšiemu spektru
žiakov a študentov. Od roku 2021 tiež organizuje regionálne turnaje a
workshopy FIRST LEGO League.
Adam Kukla je stredoškolský učiteľ fyziky a chémie. Robotike sa začal
venovať ako netechnický mentor reprezentácie Slovenska na prvom ročníku
celosvetového kola FIRST Global v roku 2017. Odvtedy sa snaží priniesť
šancu získavať skúsenosti a súťažiť v robotike čo najširšiemu spektru
žiakov a študentov. Od roku 2021 tiež organizuje regionálne turnaje a
workshopy FIRST LEGO League.
- 8. 11. 2023, 17:30-19:00, ON-LINE (66. prednáška)Pavel Jiroutek: Mobilní robotika ve skladové logistice
 V tejto prednáške s podtitulom Jak chytře třídit dárky pomocí desítek robotů sa dozviete čosi o skladových robotoch.
Vužití mobilních robotů pro automatizaci je ověřená alternativa pásových dopravníků, která přináši oproti nim zajímavé výhody zejména
v oblasti pořizovacích nákladů, jednoduchosti konstrukce, flexibilitě v případě nutnosti změn nebo například postupné škálovatelnosti transportní kapacity.
V tejto prednáške s podtitulom Jak chytře třídit dárky pomocí desítek robotů sa dozviete čosi o skladových robotoch.
Vužití mobilních robotů pro automatizaci je ověřená alternativa pásových dopravníků, která přináši oproti nim zajímavé výhody zejména
v oblasti pořizovacích nákladů, jednoduchosti konstrukce, flexibilitě v případě nutnosti změn nebo například postupné škálovatelnosti transportní kapacity.
Seminár sa tentoraz nenahrával, ale môžete si pozrieť aspoň časť prezentácie - TU a opis depa nájdete aj TU . Videoukážky: ako triedia ľudia a ako triedia roboty.
 Pavel Jiroutek je zakladateľom a zároveň CEO v spoločnosti Jiwi Robotics. V roku 2005 vyštudoval Matematicko-fyzikální faktultu
Univerzity Karlovy v obore Softwerové systémy a Umelá inteligencia. Je aktívnym členom českej robotickej komunity, zúčastňuje sa
českých i medzinárodných súťaží v oblasti outdoorovej mobilnej robotiky. Naposledy ste ho mohli vidieť na Robotour Piešťany
pod značkou Short Circuits.
Pavel Jiroutek je zakladateľom a zároveň CEO v spoločnosti Jiwi Robotics. V roku 2005 vyštudoval Matematicko-fyzikální faktultu
Univerzity Karlovy v obore Softwerové systémy a Umelá inteligencia. Je aktívnym členom českej robotickej komunity, zúčastňuje sa
českých i medzinárodných súťaží v oblasti outdoorovej mobilnej robotiky. Naposledy ste ho mohli vidieť na Robotour Piešťany
pod značkou Short Circuits.
- 4. 10. 2023, 17:30-19:00, FabLab (65. prednáška)Patrik Knaperek: Autonómna formula
 V tejto prednáške sa dozviete čosi o súťaži Student Formula, ktorá prebieha po celom svete. Slovensko zastupuje viac ako úspešne tím
študentov STU pod názvom Stuba Green Team. Jedna z divízií súťaže sa zaoberá aj návrhom autonómneho vozidla a o to v tejto prezentácii
pôjde.
V tejto prednáške sa dozviete čosi o súťaži Student Formula, ktorá prebieha po celom svete. Slovensko zastupuje viac ako úspešne tím
študentov STU pod názvom Stuba Green Team. Jedna z divízií súťaže sa zaoberá aj návrhom autonómneho vozidla a o to v tejto prezentácii
pôjde.
Po prednáške je k dispozícii záznam na YouTube, slajdy z prezentácie a video z praktickej ukážky.
 Patrik Knaperek je v súčasnosti (2023) študentom 2. ročníka inžinierskeho stupňa študijného programu Robotika a kybernetika
na Fakulte elektrotechniky a informatiky STU v Bratislave. Okrem toho je aj kapitánom študentskej organizácie STUBA Green Team,
kde spočiatku pôsobil ako člen a neskôr ako vedúci Driverless divízie.
Patrik Knaperek je v súčasnosti (2023) študentom 2. ročníka inžinierskeho stupňa študijného programu Robotika a kybernetika
na Fakulte elektrotechniky a informatiky STU v Bratislave. Okrem toho je aj kapitánom študentskej organizácie STUBA Green Team,
kde spočiatku pôsobil ako člen a neskôr ako vedúci Driverless divízie.
- 7. 6. 2023, 17:30-19:00, FabLab (64. prednáška)Andrej Lúčny: Robot iCub sa učí rozpoznávať predmety
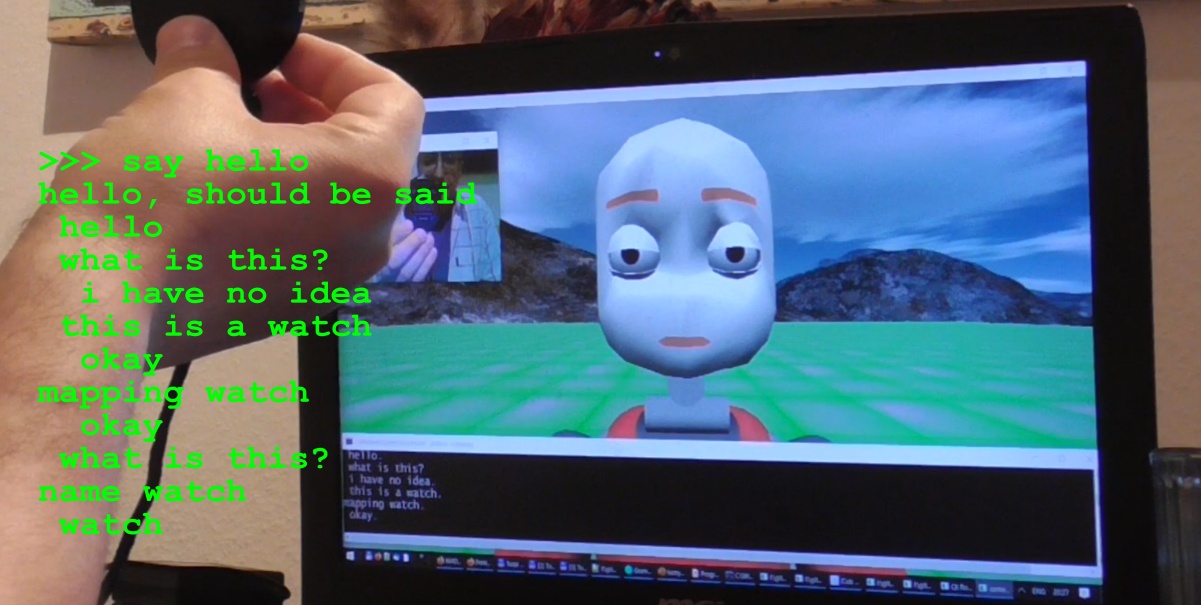 Pokračovanie vo vzdelávaní robota iCub v simulátore. Tentoraz sa robot naučí rozpoznávať objekty, ktoré mu demonštrátor predvedie. V prednáške
vysvetlíme nielen ako si môžete takúto aplikáciu naprogramovať, ale aj vďaka čomu funguje.
Základným stavebným kameňom sú dva hlboké modely: jeden od MicroSoftu a druhý od Googlu,
obohatené o asociovanie kľúčov s hodnotami a zakódovanie pozície. Dôležitým pomocníkom na
integráciu systému je blackboardová architektúra. K systému sú k dispozícii
kódy na Githube.
Pozrite si ukážkové video.
Pokračovanie vo vzdelávaní robota iCub v simulátore. Tentoraz sa robot naučí rozpoznávať objekty, ktoré mu demonštrátor predvedie. V prednáške
vysvetlíme nielen ako si môžete takúto aplikáciu naprogramovať, ale aj vďaka čomu funguje.
Základným stavebným kameňom sú dva hlboké modely: jeden od MicroSoftu a druhý od Googlu,
obohatené o asociovanie kľúčov s hodnotami a zakódovanie pozície. Dôležitým pomocníkom na
integráciu systému je blackboardová architektúra. K systému sú k dispozícii
kódy na Githube.
Pozrite si ukážkové video.
K dispozícii je záznam na YouTube, prezentácia a kód.
 Andrej Lúčny pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, venuje sa integrácii metód umelej inteligencie.
Je spoluzakladateľom občianskeho združenia Robotika.SK. Je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
Andrej Lúčny pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, venuje sa integrácii metód umelej inteligencie.
Je spoluzakladateľom občianskeho združenia Robotika.SK. Je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
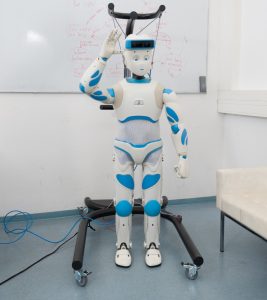
- 10. 5. 2023, 17:30-19:00, Matfyz, I9 (63. prednáška)Andrej Lúčny a Pavel Petrovič: Humanoidný robot Nico.
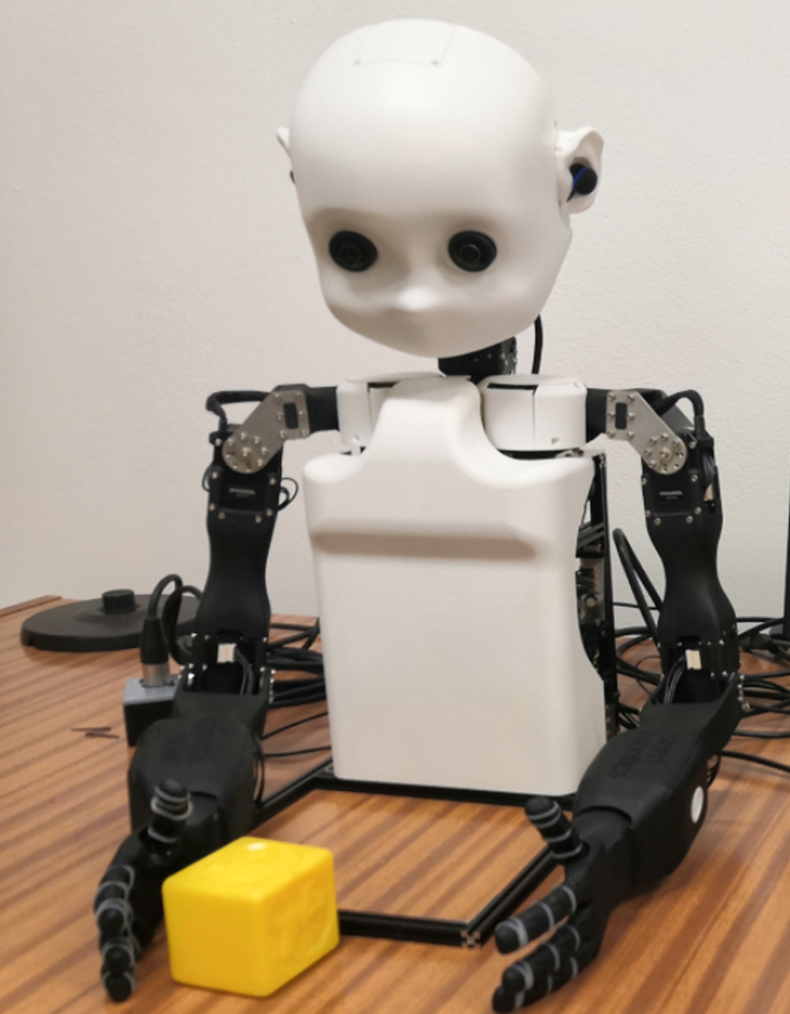 Nico je stredne drahý humanoidný robot s 22 stupňami voľnosti, dvomi kamerami, posvietením tváre,
dvomi mikrofónmi a reproduktorom. Na Matfyze sme k nemu vyvinuli Motor control GUI, podporujúci
monitorovania a riadenie pohybov robota, ovládanie jeho upevnenie, nahrávanie a prehrávanie jeho polôh a pohybov a zaparkovanie.
Pomocou tohto aparátu je možné realizovať jednoduché experimenty.
Nico je stredne drahý humanoidný robot s 22 stupňami voľnosti, dvomi kamerami, posvietením tváre,
dvomi mikrofónmi a reproduktorom. Na Matfyze sme k nemu vyvinuli Motor control GUI, podporujúci
monitorovania a riadenie pohybov robota, ovládanie jeho upevnenie, nahrávanie a prehrávanie jeho polôh a pohybov a zaparkovanie.
Pomocou tohto aparátu je možné realizovať jednoduché experimenty.
Prednáška sa bude konať fyzicky avšak výnimočne v I9 na Matfyze, kvôli prístupu k tomu tomuto robotovi.
K dispozícii je záznam na YouTube a robot má aj svoju domácu stránku.
Andrej Lúčny pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, venuje sa integrácii metód umelej inteligencie.
Je spoluzakladateľom občianskeho združenia Robotika.SK. Je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
- 5. 4. 2023, 17:30-19:00, FabLab (62. prednáška)Filip Uhlárik: Multimodálne spracovanie prirodzeného jazyka v praxi.
 V tejto prednáške si s pomocou voľne dostupných modelov
na spracovanie audia, obrazu a textu ukážeme ako preložiť hovorené slovo na text,
ako vyhodnotiť čo ním bolo myslené vo vzťahu k možnostiam robota a či
je možné požiadavku vykonať. Pozrieme sa aj na to, ako efektívne trénovať,
či jemne doladiť (fine-tunning) takéto modely na náš špecifický use-case.
V tejto prednáške si s pomocou voľne dostupných modelov
na spracovanie audia, obrazu a textu ukážeme ako preložiť hovorené slovo na text,
ako vyhodnotiť čo ním bolo myslené vo vzťahu k možnostiam robota a či
je možné požiadavku vykonať. Pozrieme sa aj na to, ako efektívne trénovať,
či jemne doladiť (fine-tunning) takéto modely na náš špecifický use-case.
záznam na YouTube
kódy na Githube
 Filip Uhlárik študoval jadrové inžinierstvo na FEI STU. Počas erasmu v Miláne sa začal
venovať umelej inteligenci v rámci predmetu medicínska robotika. Pôsobí vo firme Gerulata
Technologies, ktorá vytvorila veľký jazykový model slovenčiny a používa ho najmä na
vyhľadávanie nevhodného obsahu na Internete.
Filip Uhlárik študoval jadrové inžinierstvo na FEI STU. Počas erasmu v Miláne sa začal
venovať umelej inteligenci v rámci predmetu medicínska robotika. Pôsobí vo firme Gerulata
Technologies, ktorá vytvorila veľký jazykový model slovenčiny a používa ho najmä na
vyhľadávanie nevhodného obsahu na Internete.
- 1. 3. 2023, 17:30-19:00, Fablab (61. prednáška)Marek Šuppa: Ako vyzerá ChatGPT zvnútra?
 Decembrové zverejnenie "výskumnej pred-premiéry" (research
preview) ChatGPT spôsobil explóziu záujmu o veľké jazykové modely - až
do takej miery, že mnohí začínajú hovoriť o globálnom otepľovaní v AI.
Ako však rozoznať, kde končí realita a kde začínajú bombastické titulky
technických správ?
Decembrové zverejnenie "výskumnej pred-premiéry" (research
preview) ChatGPT spôsobil explóziu záujmu o veľké jazykové modely - až
do takej miery, že mnohí začínajú hovoriť o globálnom otepľovaní v AI.
Ako však rozoznať, kde končí realita a kde začínajú bombastické titulky
technických správ?
V tejto prednáške sa pokúsime prediskutovať z čoho sa moderné veľké jazykové modely ako ChatGPT skladajú, ako sa trénujú, čo to znamená prakticky: ako ich použiť a udržat ich "živé a funkčné" v produkcii, koľko takéto čosi stojí a nakoniec aj čo to všetko znamená pre svet robotiky.
K dispozícii je záznam na YouTube
 Marek Šuppa má na starosti výskum, vývoj a "všetky veci dátové" v
spoločnosti Slido (teraz súčasť Cisco), v poslednom čase najmä
produkcionalizáciu veľkých jazykových modelov. Popri tom tiež pomáha s
vyučovaním strojového učenia a spracovania prirodzeného jazyka na
Matfyze v Bratislave, ako aj organizáciou súťaže RoboCupJunior na
slovenskej ale aj celosvetovej úrovni.
Marek Šuppa má na starosti výskum, vývoj a "všetky veci dátové" v
spoločnosti Slido (teraz súčasť Cisco), v poslednom čase najmä
produkcionalizáciu veľkých jazykových modelov. Popri tom tiež pomáha s
vyučovaním strojového učenia a spracovania prirodzeného jazyka na
Matfyze v Bratislave, ako aj organizáciou súťaže RoboCupJunior na
slovenskej ale aj celosvetovej úrovni.
- 1. 2. 2023, 17:30-19:00, FabLab (60. prednáška)Marek Čorňák: Prirodzená interakcia človek – robot
 Celý svet diskutuje o systémoch ako je ChatGPT, avšak málo vývojárov vie, ako také systémy použiť vo svojich aplikáciách a
ešte menej ako vyzerajú zvnútra a vďaka čomu fungujú. To nám priblíži jeden z autorov takého jazykového modelu
pre slovenčinu. (TBD)
záznam na YouTube
Celý svet diskutuje o systémoch ako je ChatGPT, avšak málo vývojárov vie, ako také systémy použiť vo svojich aplikáciách a
ešte menej ako vyzerajú zvnútra a vďaka čomu fungujú. To nám priblíži jeden z autorov takého jazykového modelu
pre slovenčinu. (TBD)
záznam na YouTube
 Ing. Marek Čorňák získal v roku 2020 inžiniersky titul na FEI STU v odbore robotika a kybernetika, momentálne študent tretieho ročníka
doktorandského štúdia na FEI STU. Vo svojej diplomovej práci sa venoval návrhu gestikulárneho rozhrania medzi človekom a robotickým
systémom, v rámci HRI výskumu na fakulte, kde vytvoril vlastnú aplikáciu pre riadenie robotického systému gestami. Predmetom jeho výskumu
je oblasť interakcie človek-robot s dôrazom na kolaboratívne robotické technológie využívajúce rôzne senzorické systémy a softvérové
algoritmy. V rámci pedagogickej činnosti sa zameriava aj na vedenie študentov pri bakalárskych prácach zameraných na problematiku HRI.
Ing. Marek Čorňák získal v roku 2020 inžiniersky titul na FEI STU v odbore robotika a kybernetika, momentálne študent tretieho ročníka
doktorandského štúdia na FEI STU. Vo svojej diplomovej práci sa venoval návrhu gestikulárneho rozhrania medzi človekom a robotickým
systémom, v rámci HRI výskumu na fakulte, kde vytvoril vlastnú aplikáciu pre riadenie robotického systému gestami. Predmetom jeho výskumu
je oblasť interakcie človek-robot s dôrazom na kolaboratívne robotické technológie využívajúce rôzne senzorické systémy a softvérové
algoritmy. V rámci pedagogickej činnosti sa zameriava aj na vedenie študentov pri bakalárskych prácach zameraných na problematiku HRI.
- 7. 12. 2022, 17:30-19:00, FabLab (59. prednáška)Martin Madaras: Algoritmy 3D počitačového videnia pre bin-picking.
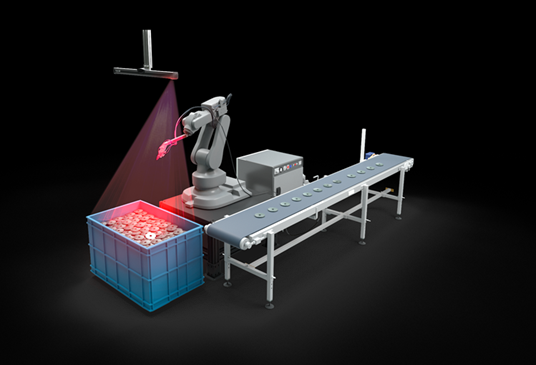 V prednáške sa zameriame na problém bin-pickingu z pohľadu 3D počítačového videnia.
Úlohou bin-pickingu je zo vstupných dát nájsť transformácie jednotlivých objektov v scéne,
ktoré sa použijú na výber objektov pomocou robotického ramena. Vstupné dáta s ktorými
budeme pracovat sú organizované mračná bodov získané 3D skenerom. Rozoberieme si algoritmy
ako segmentácia vstupného mračna bodov a lokalizácia objektov v mračne bodov.
V prednáške sa zameriame na problém bin-pickingu z pohľadu 3D počítačového videnia.
Úlohou bin-pickingu je zo vstupných dát nájsť transformácie jednotlivých objektov v scéne,
ktoré sa použijú na výber objektov pomocou robotického ramena. Vstupné dáta s ktorými
budeme pracovat sú organizované mračná bodov získané 3D skenerom. Rozoberieme si algoritmy
ako segmentácia vstupného mračna bodov a lokalizácia objektov v mračne bodov.
Bonus: súčasťou prezentácie bude aj praktická ukážká bin-pickingu, zabezpečená firmou Photoneo.
Prednáška sa bude fyzicky konať vo Fablabe, aj sa jej bude možné.
záznam na YouTube
 Martin Madaras sa zaoberá výskumom a vyvíja aplikácie v oblasti počitačového videnia
vo firme Skeletex Research s.r.o., ktorá dlhodobo spolupracuje v tejto oblasti s firmou
Photoneo s.r.o. V rokoch 2018 - 2021 prednášal na FIIT STU, od roku 2015 prednáša a robí
výskum na FMFI UK, kde nedávno habilitoval v oblasti hybridných metód 3D počitačového
videnia. Jeho výskum sa zameriava na spracovanie 3D geometrie, paralélne spracovanie dát
z 3D skenerov a kamier, a renderovanie syntetických datasetov pre metódy hlbokého učenia
na tréning neúronových sieti pre 3D videnie a spracovanie vizuálnych dát.
Martin Madaras sa zaoberá výskumom a vyvíja aplikácie v oblasti počitačového videnia
vo firme Skeletex Research s.r.o., ktorá dlhodobo spolupracuje v tejto oblasti s firmou
Photoneo s.r.o. V rokoch 2018 - 2021 prednášal na FIIT STU, od roku 2015 prednáša a robí
výskum na FMFI UK, kde nedávno habilitoval v oblasti hybridných metód 3D počitačového
videnia. Jeho výskum sa zameriava na spracovanie 3D geometrie, paralélne spracovanie dát
z 3D skenerov a kamier, a renderovanie syntetických datasetov pre metódy hlbokého učenia
na tréning neúronových sieti pre 3D videnie a spracovanie vizuálnych dát.
- 2. 11. 2022, 17:30-19:00, FabLab (58. prednáška)Martin Kubovčík: Využitie neurónových sietí pri simulovanej robotike.
 Prednáška pojednáva o možnostiach aplikácie neurónových sietí pri simulovanej robotike
prostredníctvom prostredí OpenAI Gym a PyBullet. Robot má za úlohu v danom hernom prostredí
splniť zadanú úlohu a tým je kladne odmenený. Ak úlohu neplní správne získava zápornú odmenu.
Neurónová sieť riadiaca robota má za úlohu sa naučiť ovládať pohyblivé časti robota v zmysle
maximalizácie odmien získavaných v hernom prostredí. Použitý je framework TensorFlow 2.10.0
a databáza DeepMind Reverb.
Prednáška pojednáva o možnostiach aplikácie neurónových sietí pri simulovanej robotike
prostredníctvom prostredí OpenAI Gym a PyBullet. Robot má za úlohu v danom hernom prostredí
splniť zadanú úlohu a tým je kladne odmenený. Ak úlohu neplní správne získava zápornú odmenu.
Neurónová sieť riadiaca robota má za úlohu sa naučiť ovládať pohyblivé časti robota v zmysle
maximalizácie odmien získavaných v hernom prostredí. Použitý je framework TensorFlow 2.10.0
a databáza DeepMind Reverb.
K dispozícii je >prezentácia, záznam na YouTube a sofvér na stiahnutie
 Martin Kubovčík je študentom magisterského štúdia aplikovanej informatiky na
Fakulte prírodných vied UCM v Trnave. Zaoberá sa aplikovaním metód hlbokého učenia
v simulovanej robotike, pri spracovaní údajov meraných fyzikálnych veličín a
v úlohách časovej predikcie. Vo voľnom čase venuje aj amatérskej astronómii.
Martin Kubovčík je študentom magisterského štúdia aplikovanej informatiky na
Fakulte prírodných vied UCM v Trnave. Zaoberá sa aplikovaním metód hlbokého učenia
v simulovanej robotike, pri spracovaní údajov meraných fyzikálnych veličín a
v úlohách časovej predikcie. Vo voľnom čase venuje aj amatérskej astronómii.
- 5. 10. 2022, 17:30-19:00, on-line (57. prednáška)Robotour minikonferencia
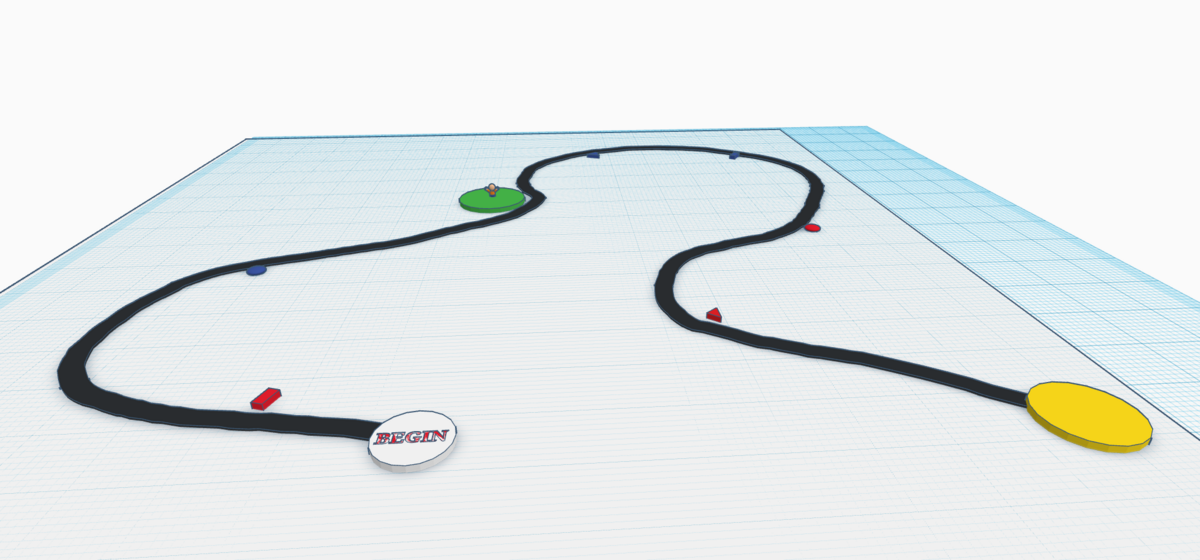
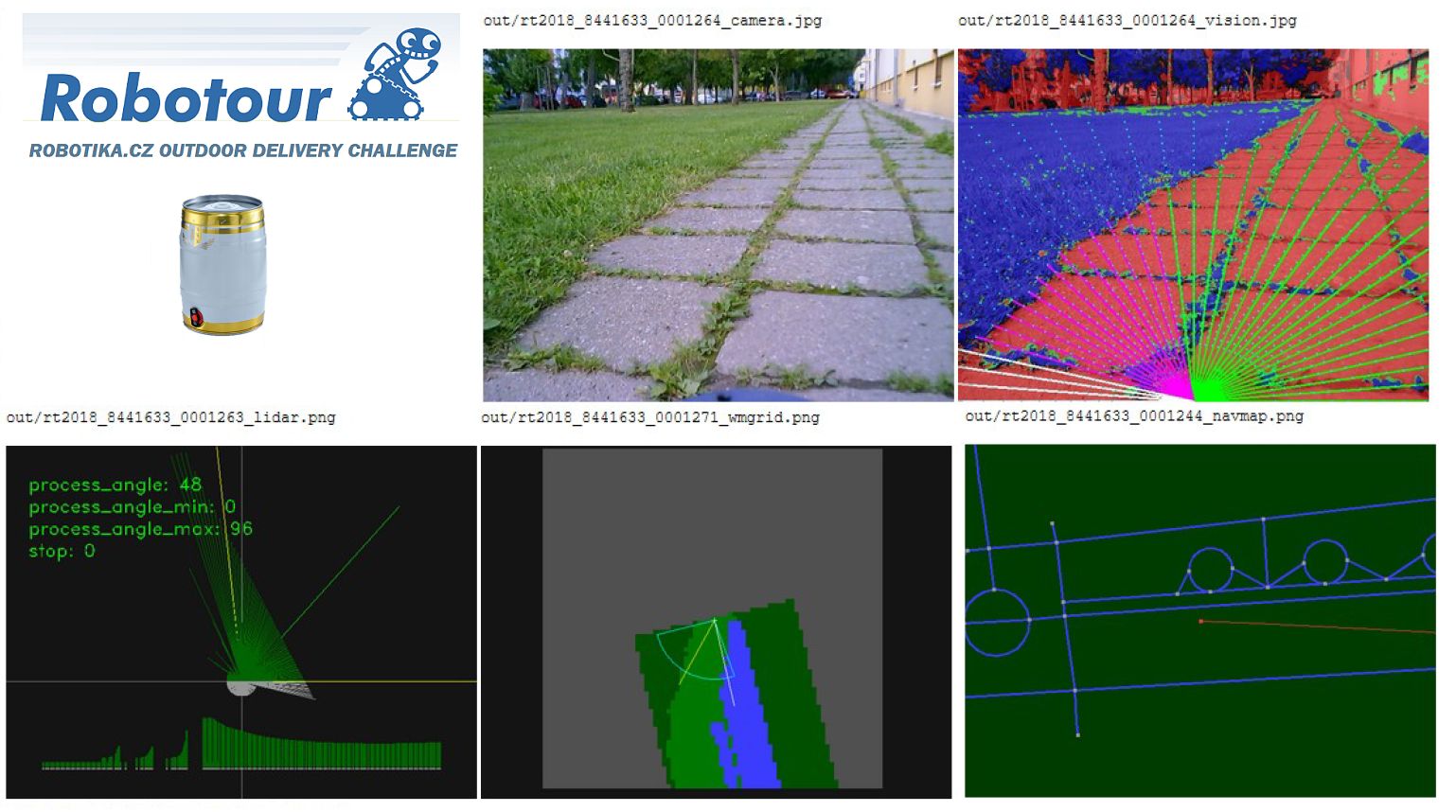
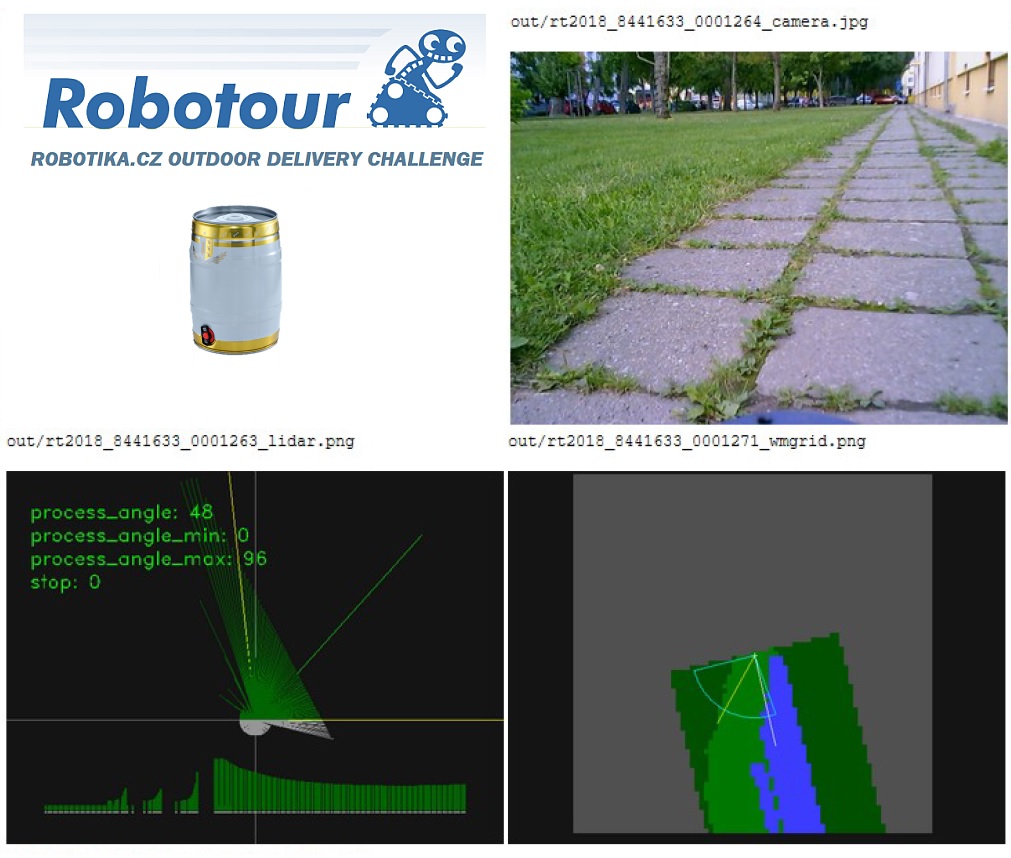 Robotour je už tradicná outdoorová sútaž autonómnych robotov, ktorí by mali dokázat odviezt v niektorom parku užitocný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie zúcastnených tímov z
práve skonceného rocníka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Zacneme všeobecne o sútaži
ako takej, potom privítame tímy ARBot (Aleš Ruda) z Prahy, Istrobotics
(prednáša Rado Kovác) a Smelý Zajko (Pavel Petrovic) z Bratislavy. Dozviete sa mnoho
informácií, ktoré inde nenájdete, ci už o konštrukcii robota do vonkajšieho prostredia, o softvéroch na spracovanie
obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia stoviek malých praktických problémov, ktoré
sa popritom vyskytli.
Robotour je už tradicná outdoorová sútaž autonómnych robotov, ktorí by mali dokázat odviezt v niektorom parku užitocný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie zúcastnených tímov z
práve skonceného rocníka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Zacneme všeobecne o sútaži
ako takej, potom privítame tímy ARBot (Aleš Ruda) z Prahy, Istrobotics
(prednáša Rado Kovác) a Smelý Zajko (Pavel Petrovic) z Bratislavy. Dozviete sa mnoho
informácií, ktoré inde nenájdete, ci už o konštrukcii robota do vonkajšieho prostredia, o softvéroch na spracovanie
obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia stoviek malých praktických problémov, ktoré
sa popritom vyskytli.
Viac informácií: na stránke Robotour
K dispozícii je záznam na YouTube.
- 7. 9. 2022, 17:30-19:00, on-line (16. cvičenie)Jednoduché experimenty s iCubSim – alebo na čo je dobrá čierna tabuľa
 Na cvičení budeme riešiť jednoduchú manipulačnú úlohu: aby robot na základe svojho vnímania zdvihol zo stola
loptu, povedal "lopta" a zase ju pustil. Začneme s jednoduchšími variantmi a postupne budeme riešenie
zdokonaľovať. Aj pri tak jednoduchej úlohe narazíme na problémy, ktorých jedným z možných riešení je
tzv. blackboard-ová architektúra.
Na cvičení budeme riešiť jednoduchú manipulačnú úlohu: aby robot na základe svojho vnímania zdvihol zo stola
loptu, povedal "lopta" a zase ju pustil. Začneme s jednoduchšími variantmi a postupne budeme riešenie
zdokonaľovať. Aj pri tak jednoduchej úlohe narazíme na problémy, ktorých jedným z možných riešení je
tzv. blackboard-ová architektúra.
Cvičenie sa bude fyzicky konať vo Fablabe, aj sa ho bude možné zúčastniť sa aj na diaľku. Používať budeme Python, MS Windows, 64bitový HW a OS.
sofvér na stiahnutie
návod a patch pre Linux od Martina Kubovčíka
K dispozícii je záznam na YouTube.
Andrej Lúčny pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave.
Je spoluzakladateľom občianskeho združenia Robotika.SK.
Je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
- 1. 6. 2022, 17:30-19:00, on-line (56. prednáška)Artem Sazonov: AI and Robotic as the means to overcome arising global challenges and everyday issues
 Last decade humanity permanently faces global challenges which make scientific community search new and efficient means to
overcome them. One of the most challenging issue humanity is dealing with is pandemic which teaches us to live in new and
more complicated circumstances. Simultaneously with the pandemic restrictions the war in Ukraine give us new and even more
tragedy lessons. Therefore, from the scientific side we should response to these challenges with the effective instruments
based on the AI and Robotics.
Last decade humanity permanently faces global challenges which make scientific community search new and efficient means to
overcome them. One of the most challenging issue humanity is dealing with is pandemic which teaches us to live in new and
more complicated circumstances. Simultaneously with the pandemic restrictions the war in Ukraine give us new and even more
tragedy lessons. Therefore, from the scientific side we should response to these challenges with the effective instruments
based on the AI and Robotics.
There is a presentation and YouTube video available.
K dispozícii je prezentácia a záznam na YouTube.
 Artem SAZONOV PhD, Assoc. Prof. Automation Hardware and Software Department, National Technical
University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute”, Ukraine. Born in Zhytomyr, he graduated in 2009 from
the Igor Sikorsky Kyiv Polytechnic Institute, and in 2014 obtained his PhD diploma in field of Automation of processes control.
In 2016-2017 postdoc researcher at TU Wien on topic “Investigation of computer vision system for the application to dynamic environments”.
In 2021 by the Supreme Council of Ukraine was awarded the State Prize for young scientists.
Artem SAZONOV PhD, Assoc. Prof. Automation Hardware and Software Department, National Technical
University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute”, Ukraine. Born in Zhytomyr, he graduated in 2009 from
the Igor Sikorsky Kyiv Polytechnic Institute, and in 2014 obtained his PhD diploma in field of Automation of processes control.
In 2016-2017 postdoc researcher at TU Wien on topic “Investigation of computer vision system for the application to dynamic environments”.
In 2021 by the Supreme Council of Ukraine was awarded the State Prize for young scientists.
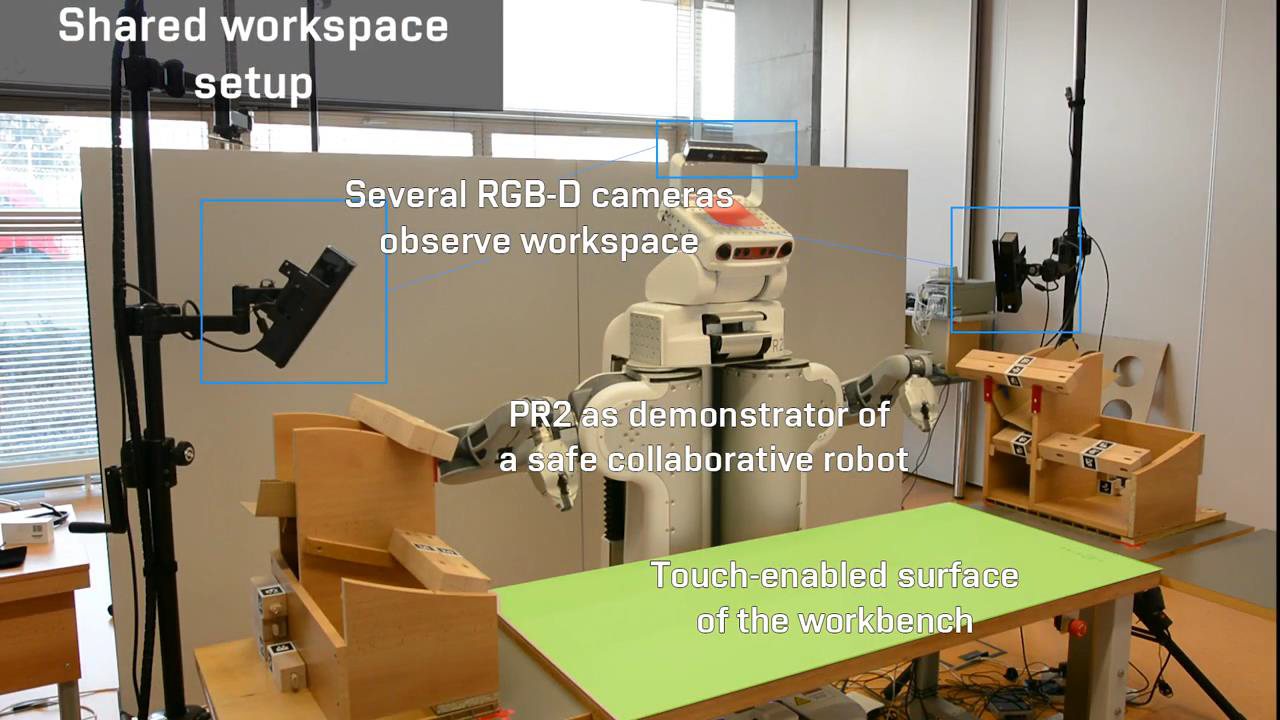
- 4. 5. 2022, 17:30-19:00, on-line (55. prednáška)Petr Švarný: Výkon nebo bezpečnost - efektivní kolaborativní robotika
 Před několika lety se spustila vlna kolaborativních robotů, které slibovaly převratné změny
v průmyslové robotice díky jejich jednoduché instalaci a bezpečném užívání. Bohužel praxe
ukázala, že tento příslib se nedaří naplnit neboť bezpečnost jde často proti výkonnosti.
Na semináři se představí samotná úskalí efektivní kolaborativní robotiky, včetně často
diskutované technické specifikace 15066 a také výsledky z našeho výzkumu zdůrazňující potřebu
empirických měření na místě.
Před několika lety se spustila vlna kolaborativních robotů, které slibovaly převratné změny
v průmyslové robotice díky jejich jednoduché instalaci a bezpečném užívání. Bohužel praxe
ukázala, že tento příslib se nedaří naplnit neboť bezpečnost jde často proti výkonnosti.
Na semináři se představí samotná úskalí efektivní kolaborativní robotiky, včetně často
diskutované technické specifikace 15066 a také výsledky z našeho výzkumu zdůrazňující potřebu
empirických měření na místě.
K dispozícii je prezentácia a záznam na YouTube.
 Petr Švarný je doktorandem na Katedře kybernetiky FEL ČVUT ve skupině Humanoidní a kognitivní
robotiky Matěje Hoffmanna, kde se zaměřuje na výzkum bezpečné spolupráce člověka a robota.
Petr Švarný je doktorandem na Katedře kybernetiky FEL ČVUT ve skupině Humanoidní a kognitivní
robotiky Matěje Hoffmanna, kde se zaměřuje na výzkum bezpečné spolupráce člověka a robota.
- 6. 4. 2022, 17:30-19:00, Fablab (54. prednáška)Tomáš Lázna: Využití robotických prostředků pro měření a mapování radiace
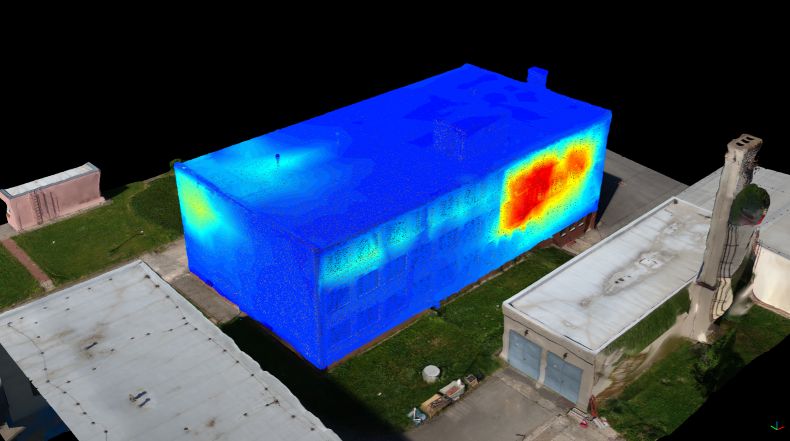 Robotika nachází často uplatnění v oblasti radiační ochrany, a nejedná se pouze o shazování radioaktivního grafitu
ze střechy, jak jsme mohli vidět v seriálu Černobyl z roku 2019. Hlavní výhoda je zde jasná – není nutné posílat
člověka do prostředí, které je potenciálně nebezpečné. Navíc je možné díky moderním prostředkům lokalizace vytvářet
velmi precizní mapy distribuce ionizujícího záření. Seminář se zaměří jak na obecné principy detekce radiace (a úskalí
s tím spojená), tak na konkrétní aplikace využívající pozemní roboty a drony. Budou představeny algoritmy pro
lokalizaci zdrojů v definované oblasti zájmu, a také nově ověřená metoda pro získání 3D radiační mapy budovy.
Robotika nachází často uplatnění v oblasti radiační ochrany, a nejedná se pouze o shazování radioaktivního grafitu
ze střechy, jak jsme mohli vidět v seriálu Černobyl z roku 2019. Hlavní výhoda je zde jasná – není nutné posílat
člověka do prostředí, které je potenciálně nebezpečné. Navíc je možné díky moderním prostředkům lokalizace vytvářet
velmi precizní mapy distribuce ionizujícího záření. Seminář se zaměří jak na obecné principy detekce radiace (a úskalí
s tím spojená), tak na konkrétní aplikace využívající pozemní roboty a drony. Budou představeny algoritmy pro
lokalizaci zdrojů v definované oblasti zájmu, a také nově ověřená metoda pro získání 3D radiační mapy budovy.
K dispozícii je prezentácia a záznam na YouTube.
 Tomáš Lázna je doktorandem na Ústavu automatizace a měřicí techniky FEKT VUT v Brně ve skupině robotiky a umělé inteligence.
Působí rovněž ve skupině Kybernetika a robotika v rámci Středoevropského technologického institutu. Dlouhodobě se věnuje robotickému
měření radiace, zejména rozvoji algoritmů pro automatizaci této úlohy. Spolupracuje s Nuclear Science and Instrumentation Laboratory
spadající pod Mezinárodní agenturu pro atomovou energii (IAEA).
Tomáš Lázna je doktorandem na Ústavu automatizace a měřicí techniky FEKT VUT v Brně ve skupině robotiky a umělé inteligence.
Působí rovněž ve skupině Kybernetika a robotika v rámci Středoevropského technologického institutu. Dlouhodobě se věnuje robotickému
měření radiace, zejména rozvoji algoritmů pro automatizaci této úlohy. Spolupracuje s Nuclear Science and Instrumentation Laboratory
spadající pod Mezinárodní agenturu pro atomovou energii (IAEA).
- 2. 3. 2022, 17:30-19:00, on-line (53. prednáška)František Duchoň: Projekt Saharra
 Národné centrum robotiky je partnerom zaujímavého projektu s názvom SAHARRA (Semi Autonomous HAir Removal Robot Assistant).
Cieľom projektu je vývoj kolaboratívneho robotického systému pre procedúru permanentného odstránenia ochlpenia v dermatologických
a estetických centrách. Lídrom projektu je MUDr. František Okál. Za NCR sa zúčastňujú prof. Ing. František Duchoň, PhD. a kolektív.
V prvom kroku vývoja by robot mal umožniť ľahšiu manipuláciu s hlavicou pre epiláciu a v druhom kroku by mal byť schopný sám
sledovať líniu ľudského tela. Epiláciu by tak vedel vykonávať samostatne.
Projekt bol prezentovaný v rámci KUKA Innovation Award 2020 Medical Robotics Challenge a dostal sa medzi päť finalistov.
Národné centrum robotiky je partnerom zaujímavého projektu s názvom SAHARRA (Semi Autonomous HAir Removal Robot Assistant).
Cieľom projektu je vývoj kolaboratívneho robotického systému pre procedúru permanentného odstránenia ochlpenia v dermatologických
a estetických centrách. Lídrom projektu je MUDr. František Okál. Za NCR sa zúčastňujú prof. Ing. František Duchoň, PhD. a kolektív.
V prvom kroku vývoja by robot mal umožniť ľahšiu manipuláciu s hlavicou pre epiláciu a v druhom kroku by mal byť schopný sám
sledovať líniu ľudského tela. Epiláciu by tak vedel vykonávať samostatne.
Projekt bol prezentovaný v rámci KUKA Innovation Award 2020 Medical Robotics Challenge a dostal sa medzi päť finalistov.
Viac informácií: vo videu.
K dispozícii je prezentácia a záznam na YouTube.
 František Duchoň v súčasností pôsobí ako profesor na FEI STU. Je garantom predmetov Riadenie
mobilných robotov, Výrobné systémy a Technické prostriedky riadenia. V súčasnosti je autorom alebo
spoluautorom vyše 200 publikácií o robotike a príbuzných témach. Je autorom aj 3 vysokoškolských
učebníc a jednej monografie. Je spoluzakladateľom a v súčasnosti predsedom Národného centra robotiky.
František Duchoň v súčasností pôsobí ako profesor na FEI STU. Je garantom predmetov Riadenie
mobilných robotov, Výrobné systémy a Technické prostriedky riadenia. V súčasnosti je autorom alebo
spoluautorom vyše 200 publikácií o robotike a príbuzných témach. Je autorom aj 3 vysokoškolských
učebníc a jednej monografie. Je spoluzakladateľom a v súčasnosti predsedom Národného centra robotiky.
- 2. 2. 2022, 17:30-19:00, on-line (52. prednáška)Robotour minikonferencia
Robotour je už tradičná outdoorová súťaž autonómnych robotov, ktorí by mali dokázať odviezť v niektorom parku užitočný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie zúčastnených tímov z
uplynulého roka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Privítame tímy Istrobotics
(prednáša Rado Kováč), Smelý Zajko (Pavel Petrovič) a Sĺňava (Andrej Lúčny) z Bratislavy a ARBot (Aleš Ruda) z Prahy. Dozviete sa mnoho
informácií, ktoré inde nenájdete, či už o konštrukcii robota do vonkajšieho prostredia, o softvéroch na spracovanie
obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia stoviek malých praktických problémov, ktoré
sa popritom vyskytli.
Viac informácií: na stránke Robotour
Video na YouTube.
- 1. 12. 2021, 17:30-19:00, on-line (51. prednáška)Tomáš Rouček: Roboti pod zemou - DARPA Subterranean Challenge
 Robotický tým z Fakulty elektrotechnické ČVUT opět bodoval na celosvětové soutěži DARPA
Subterranean Challenge, kterou pořádá agentura DARPA spadající pod americké ministerstvo obrany.
Cílem jednotlivých kol bylo posoudit, kdo navrhne nejlepšího robotického záchranáře, který v
bludištích štol a suterénů najde batohy nebo jiné artefakty představující třeba oběť závalu.
V MegaCavern soutěžila sestava kolových, pásových, létajících a čtyřnohých záchranářských robotů.
Ty měly za úkol ve vápencovém dole hledat objekty. V podzemním komplexu MegaCavern v Kentucky
pak probíhala soutěž reálných robotů. ČVUT v konkurenci osmi nejlepších týmů světa skončilo šesté.
Na semináři vám Tomáš Krajník a Tomáš Rouček z ČVUT Praha vysvětlí o co v soutěži šlo, jaké
problémy se vyskytli a jak se jim podařilo problémy vyřešit.
Robotický tým z Fakulty elektrotechnické ČVUT opět bodoval na celosvětové soutěži DARPA
Subterranean Challenge, kterou pořádá agentura DARPA spadající pod americké ministerstvo obrany.
Cílem jednotlivých kol bylo posoudit, kdo navrhne nejlepšího robotického záchranáře, který v
bludištích štol a suterénů najde batohy nebo jiné artefakty představující třeba oběť závalu.
V MegaCavern soutěžila sestava kolových, pásových, létajících a čtyřnohých záchranářských robotů.
Ty měly za úkol ve vápencovém dole hledat objekty. V podzemním komplexu MegaCavern v Kentucky
pak probíhala soutěž reálných robotů. ČVUT v konkurenci osmi nejlepších týmů světa skončilo šesté.
Na semináři vám Tomáš Krajník a Tomáš Rouček z ČVUT Praha vysvětlí o co v soutěži šlo, jaké
problémy se vyskytli a jak se jim podařilo problémy vyřešit.
Pozn.: Ešte pred začiatkom hlavného seminára nám František Brabec, ktorý bol našim hosťom v máji, v stručnosti doplní ako dopadla súťaž NASA Space Robotics Challenge a ako v nej obstála Robotika.CZ
Video na YouTube a pozrite si aj galériu s fotkami a videami.
 Tomáš Rouček zavŕšil v roku 2020 na ČVUT štúdium diplomovou prácou Sensor fusion for object
localisation in adverse conditions for mobile robots a teraz pokračuje ako doktorand pod vedením
Tomáša Krajníka.
Tomáš Rouček zavŕšil v roku 2020 na ČVUT štúdium diplomovou prácou Sensor fusion for object
localisation in adverse conditions for mobile robots a teraz pokračuje ako doktorand pod vedením
Tomáša Krajníka.
- 3. 11. 2021, 17:30-19:00, on-line (50. prednáška)Vladimír Cviklovič: Autonómna mobilná robotika v poľnohospodárstve.
 V oblasti poľnohospodárstva sú na autonómne mobilné roboty kladené špecifické požiadavky, čomu musí byť prispôsobený
aj návrh stroja po technickej stránke. Popri technickej stránke sú dôležité aj dopady sociálne, ekonomické a
environmentálne. Autonómny mobilný robot SaMoRob vyvinutý na Technickej fakulte, Slovenskej poľnohospodárskej
univerzity v Nitre bol vyvíjaný s ohľadom na všetky spomenuté oblasti. V rámci prednášky si priblížime
podrobnosti ohľadom návrhu, vývoja a výroby autonómneho vozidla. Sústredíme sa aj na možnosti
kalibrácie inerciálnych snímačov bez špeciálnej meracej a kalibračnej techniky.
V oblasti poľnohospodárstva sú na autonómne mobilné roboty kladené špecifické požiadavky, čomu musí byť prispôsobený
aj návrh stroja po technickej stránke. Popri technickej stránke sú dôležité aj dopady sociálne, ekonomické a
environmentálne. Autonómny mobilný robot SaMoRob vyvinutý na Technickej fakulte, Slovenskej poľnohospodárskej
univerzity v Nitre bol vyvíjaný s ohľadom na všetky spomenuté oblasti. V rámci prednášky si priblížime
podrobnosti ohľadom návrhu, vývoja a výroby autonómneho vozidla. Sústredíme sa aj na možnosti
kalibrácie inerciálnych snímačov bez špeciálnej meracej a kalibračnej techniky.
Na stiahnutie: prezentácia a videozáznam
 Vladimír Cviklovič sa odborne špecializuje na výskum a vývoj v oblasti riadiacich
systémov. Zameriava sa najmä na oblasť navigácie a riadenia v autonómnej mobilnej
robotike čo sa pretavilo do realizácie autonómneho mobilného robota SaMoRob.
V súčasnosti pôsobí vo funkcii docenta v Ústave elektrotechniky, automatizácie,
informatiky a fyziky na Technickej fakulte v Slovenskej poľnohospodárskej univerzite
v Nitre. Pri prednáškovej, no najmä výskumnej činnosti využíva svoje praktické
skúsenosti nadobudnuté prácou v súkromnom sektore, kde pracuje na pozícii kľúčového
vedeckovýskumného pracovníka v oblasti priemyselných zariadení založených na
mikrokontroléroch. Viaceré záverečné práce vypracované pod jeho vedením získavajú
ocenenia doma (Zväz slovenských vedecko-technických spoločností, ŠVOČ na iných
univerzitách), ale aj v zahraničí (Claas Foundation, Audi). Svoj inovatívny potenciál
ako pôvodca pretavil do takmer dvadsiatich predmetov priemyselného vlastníctva.
Vladimír Cviklovič sa odborne špecializuje na výskum a vývoj v oblasti riadiacich
systémov. Zameriava sa najmä na oblasť navigácie a riadenia v autonómnej mobilnej
robotike čo sa pretavilo do realizácie autonómneho mobilného robota SaMoRob.
V súčasnosti pôsobí vo funkcii docenta v Ústave elektrotechniky, automatizácie,
informatiky a fyziky na Technickej fakulte v Slovenskej poľnohospodárskej univerzite
v Nitre. Pri prednáškovej, no najmä výskumnej činnosti využíva svoje praktické
skúsenosti nadobudnuté prácou v súkromnom sektore, kde pracuje na pozícii kľúčového
vedeckovýskumného pracovníka v oblasti priemyselných zariadení založených na
mikrokontroléroch. Viaceré záverečné práce vypracované pod jeho vedením získavajú
ocenenia doma (Zväz slovenských vedecko-technických spoločností, ŠVOČ na iných
univerzitách), ale aj v zahraničí (Claas Foundation, Audi). Svoj inovatívny potenciál
ako pôvodca pretavil do takmer dvadsiatich predmetov priemyselného vlastníctva.
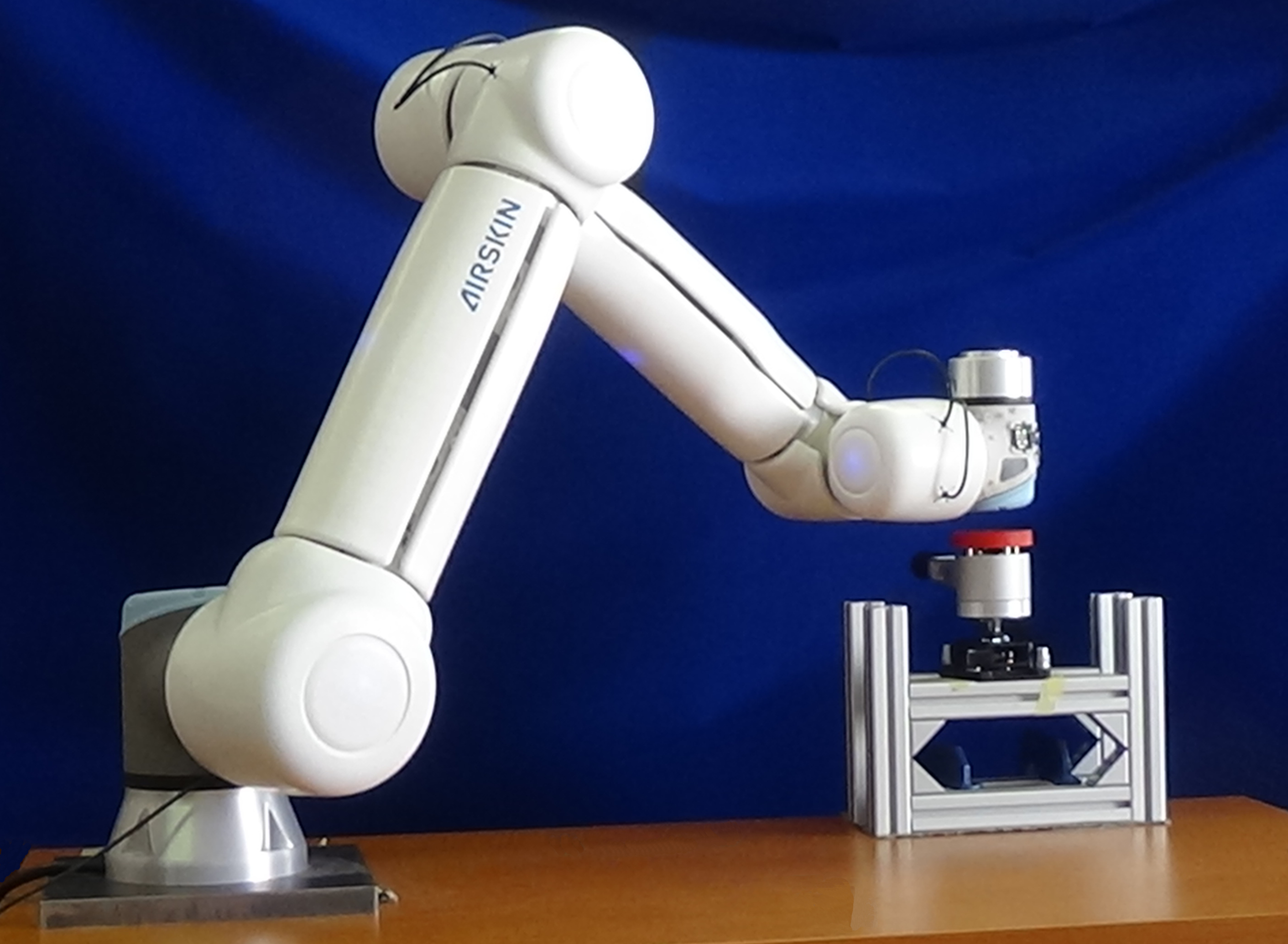
- 6. 10. 2021, 17:30-19:00, on-line (49. prednáška)Bernd Hader, Felix Sturzl: The colaborative robot UR5
 Dňa 6. 10. 2021 sa vo Fablabe uskutočnil pre limitovaný počet registrovaných účastníkov
celodenný workshop zameraný na prácu s kolaboratívnym robotom UR5. V rámci nášho seminára
sa uskutoční aj prednáška pre širokú verejnosť. Kolaboratívna robotika presadzuje miesto
plnej automatizácie výroby zvýšenie výkonu robotníka jeho spoluprácou s robotom. Hlavným
problémom tohto prístupu je bezpečnosť práce. (Prednáška je v anglickom jazyku.) Z prenášky
sú dostupné:
Dňa 6. 10. 2021 sa vo Fablabe uskutočnil pre limitovaný počet registrovaných účastníkov
celodenný workshop zameraný na prácu s kolaboratívnym robotom UR5. V rámci nášho seminára
sa uskutoční aj prednáška pre širokú verejnosť. Kolaboratívna robotika presadzuje miesto
plnej automatizácie výroby zvýšenie výkonu robotníka jeho spoluprácou s robotom. Hlavným
problémom tohto prístupu je bezpečnosť práce. (Prednáška je v anglickom jazyku.) Z prenášky
sú dostupné:
Prezentačné video
Záznam z prednášky

 Bernd Hader a Felix Sturzl pôsobia v Institute fur Managementwissenschaften na
Technische Universität Wien, zameriavajú sa na digitálne
asistenčné systémy vo výrobe a zlepšovaniu výrobných procesov.
Bernd Hader a Felix Sturzl pôsobia v Institute fur Managementwissenschaften na
Technische Universität Wien, zameriavajú sa na digitálne
asistenčné systémy vo výrobe a zlepšovaniu výrobných procesov.
- 8. 9. 2021, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (48. prednáška)Michal Chovanec: Ako sa pomstiť v hre "Montezumova pomsta"
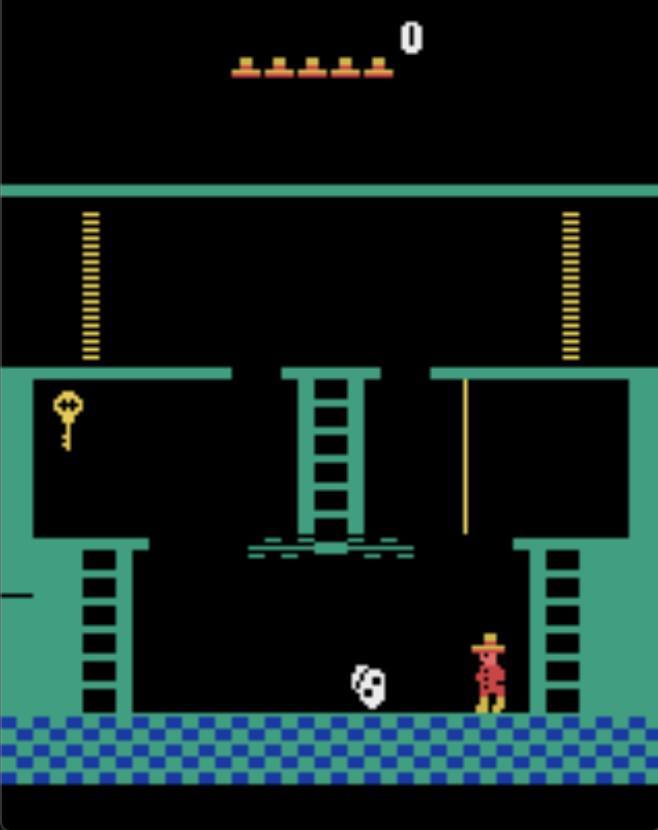 Vytvorenie umelého hráča počítačovej hry, ktorý sa vyznačuje určitou inteligenciou, je
obľúbeným testom metód umelej inteligencie. Pritom sa cení, keď inteligenciu tento hráč
nadobudne len základe opakovaného hrania danej hry, presnejšie na základe odmeny a trestu
z výsledku hry. Na príklade hráča pre hru "Montezumova pomsta" sme ukážeme diskrétne a spojité
riadenie. Zameriame sa na preskúmavame herného priestoru pomocou tzv. zvedavých agentov.
Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
kódy na Github-e (TBD),
prezentácia a
videozáznam
Vytvorenie umelého hráča počítačovej hry, ktorý sa vyznačuje určitou inteligenciou, je
obľúbeným testom metód umelej inteligencie. Pritom sa cení, keď inteligenciu tento hráč
nadobudne len základe opakovaného hrania danej hry, presnejšie na základe odmeny a trestu
z výsledku hry. Na príklade hráča pre hru "Montezumova pomsta" sme ukážeme diskrétne a spojité
riadenie. Zameriame sa na preskúmavame herného priestoru pomocou tzv. zvedavých agentov.
Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
kódy na Github-e (TBD),
prezentácia a
videozáznam
 Michal Chovanec je výskumník v oblasti umelej inteligencie a jej výpočtových prostriedkov. Pôsobí
vo firme Tachyum v Bratislave. PhD získal na Žilinskej univerzite. Okrem iných úspechov získal
zlatú medailu v súťaži ISTROBOT v kategórii Stopár. Vo voľnom čase sa venuje sa turistike,
lukostreľbe a bojovým umeniam.
Michal Chovanec je výskumník v oblasti umelej inteligencie a jej výpočtových prostriedkov. Pôsobí
vo firme Tachyum v Bratislave. PhD získal na Žilinskej univerzite. Okrem iných úspechov získal
zlatú medailu v súťaži ISTROBOT v kategórii Stopár. Vo voľnom čase sa venuje sa turistike,
lukostreľbe a bojovým umeniam.
- 4. 8. 2021, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (15. cvičenie)Michal Chovanec: Ako trénovať robotov
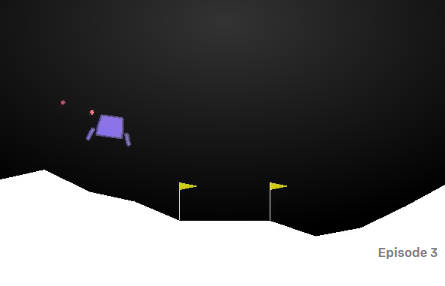 Vytvoríme umelého hráča v hre Lunar Lander, ktorého riadi umelá neurónová sieť.
Urobíme tak pomocou učenia posiľňovaním, čiže tento hráč svoje schopnosti nadobudne
len základe opakovaného hrania danej hry, presnejšie na základe odmeny a trestu
z jej výsledku. Zložitejšie spojité riadenie uplatníme potom pre natrénovanie robota
do kategórie Stopár na súťaži ISTROBOT.
Záujemci o aktívnu účasť potrebujú Python3 s knižnicami torch, gym, numpy, pybullet, opencv, box2d-py.
Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
kódy na Github-e,
dokumentácia na Github-e,
prezentácia (1),
prezentácia (2) a
videozáznam
Vytvoríme umelého hráča v hre Lunar Lander, ktorého riadi umelá neurónová sieť.
Urobíme tak pomocou učenia posiľňovaním, čiže tento hráč svoje schopnosti nadobudne
len základe opakovaného hrania danej hry, presnejšie na základe odmeny a trestu
z jej výsledku. Zložitejšie spojité riadenie uplatníme potom pre natrénovanie robota
do kategórie Stopár na súťaži ISTROBOT.
Záujemci o aktívnu účasť potrebujú Python3 s knižnicami torch, gym, numpy, pybullet, opencv, box2d-py.
Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
kódy na Github-e,
dokumentácia na Github-e,
prezentácia (1),
prezentácia (2) a
videozáznam
Michal Chovanec je výskumník v oblasti umelej inteligencie a jej výpočtových prostriedkov. Pôsobí
vo firme Tachyum v Bratislave. PhD získal na Žilinskej univerzite. Okrem iných úspechov získal
zlatú medailu v súťaži ISTROBOT v kategórii Stopár. Vo voľnom čase sa venuje sa turistike,
lukostreľbe a bojovým umeniam.
- 7. 7. 2021, 17:30-19:00, FabLab, CVTI, Ilkovicova 8, Bratislava. (14. cvičenie)Andrej Lúčny: Detekcia hrán pomocou hlbokého učenia
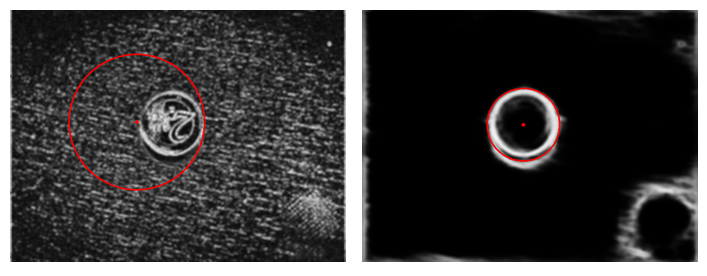 V robotike využívame viacero klasických algoritmov, ktoré sa operajú o nájdenie hrán
(napríklad detekcia kružnice pomocou Houghovej transformácie). Ich použitie je, limitované tým, že kvalitné
hrany nájdeme klasickým prístupom (Sobelov operátor) len v prostredí s dostatočne kontrastným pozadím.
Ukážeme ako možno tento nedostatok prekonať pomocou hlbokého učenia.
Záujemci o aktívnu účasť potrebujú počítač so 64bit hw, usb kameru, 64bit OS Ubuntu alebo MS Windows
Python 3.7 a nami dodané OpenCV. Záujemci o podrobnejšie inštrukcie si o ne môžu požiadať
na andylucny@gmail.com. Seminár sa konal vo Fablabe, avšak bolo možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
prezentácia a
kódy na githube,
videozáznam
V robotike využívame viacero klasických algoritmov, ktoré sa operajú o nájdenie hrán
(napríklad detekcia kružnice pomocou Houghovej transformácie). Ich použitie je, limitované tým, že kvalitné
hrany nájdeme klasickým prístupom (Sobelov operátor) len v prostredí s dostatočne kontrastným pozadím.
Ukážeme ako možno tento nedostatok prekonať pomocou hlbokého učenia.
Záujemci o aktívnu účasť potrebujú počítač so 64bit hw, usb kameru, 64bit OS Ubuntu alebo MS Windows
Python 3.7 a nami dodané OpenCV. Záujemci o podrobnejšie inštrukcie si o ne môžu požiadať
na andylucny@gmail.com. Seminár sa konal vo Fablabe, avšak bolo možné sa ho zúčastniť aj cez
internet.
Na stiahnutie:
prezentácia a
kódy na githube,
videozáznam
Andrej Lúčny pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave.
Je spoluzakladateľom občianskeho združenia Robotika.SK.
Je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
- 2. 6. 2021, 17:30-19:00, on-line (47. prednáška)Pavel Krsek: Robotické vysavače pro výuku mobilní robotiky
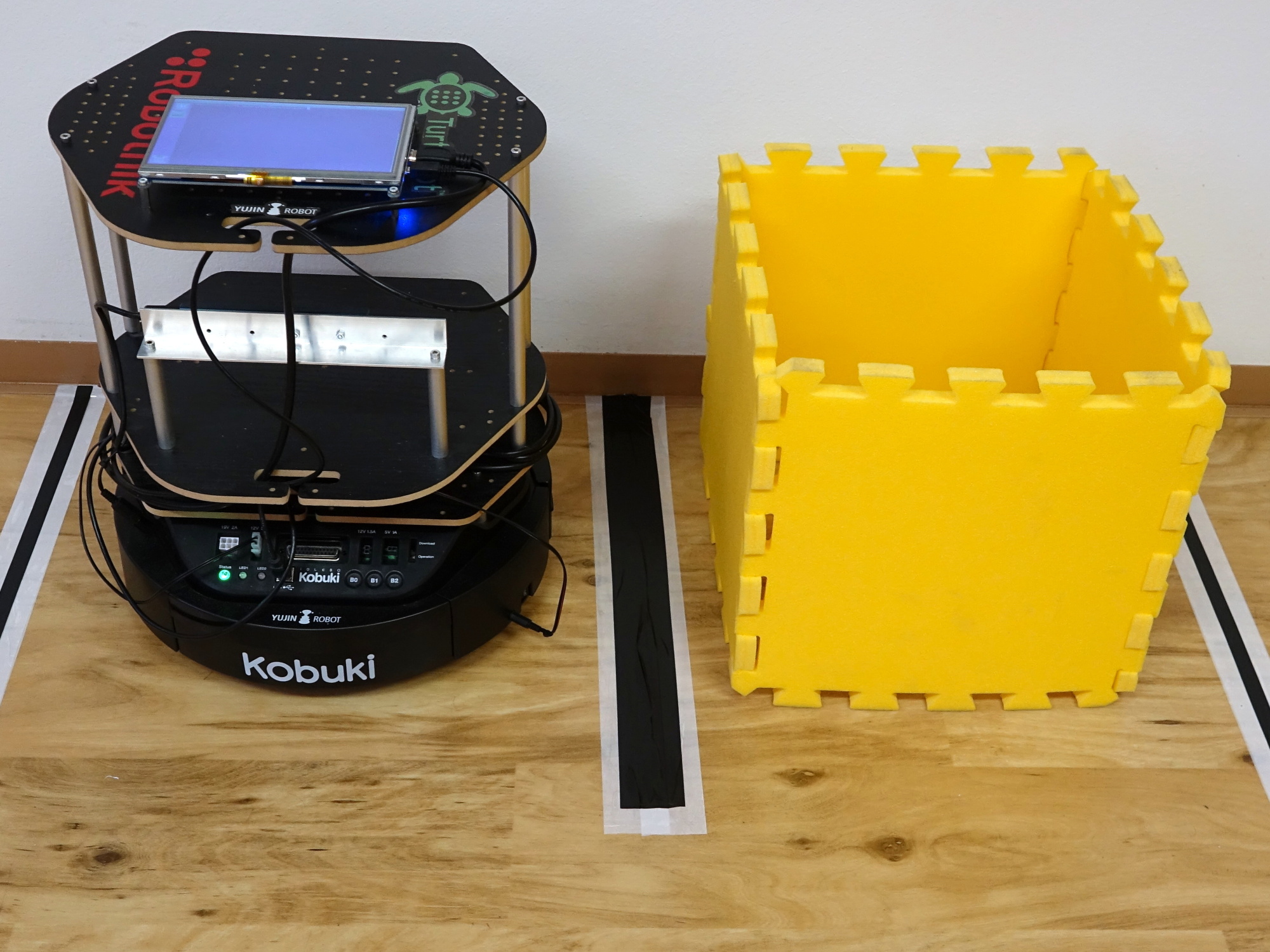 Představíme robotickou platformu Turtlebot ,
kterou používáme pro výuku mobilní robotiky ve druhém ročníku. Platforma je programově
otevřená a podporuje ROS (Robot Operating Systém). Pro výuku je doplněna kamerou a 3D
senzorem. Na příkladu studentských úloh (slalom, jízda po silnici, parkování u zdi)
ukážeme zpracování obrazu z kamery a 3D senzoru. Soustředíme se na klasickou segmentací,
hranovou detekcí, RANSAC algoritmus a Hough transformací. Pro zpracování obrazu používáme
Python a OpenCV. Proto jsou algoritmy snadno přenositelné, a je možné, aby si zájemci
vše vyzkoušeli i doma na jiné platformě. Prezentace pro studenty z předešlých let si
můžete prohlédnout:
zde a
zde.
Představíme robotickou platformu Turtlebot ,
kterou používáme pro výuku mobilní robotiky ve druhém ročníku. Platforma je programově
otevřená a podporuje ROS (Robot Operating Systém). Pro výuku je doplněna kamerou a 3D
senzorem. Na příkladu studentských úloh (slalom, jízda po silnici, parkování u zdi)
ukážeme zpracování obrazu z kamery a 3D senzoru. Soustředíme se na klasickou segmentací,
hranovou detekcí, RANSAC algoritmus a Hough transformací. Pro zpracování obrazu používáme
Python a OpenCV. Proto jsou algoritmy snadno přenositelné, a je možné, aby si zájemci
vše vyzkoušeli i doma na jiné platformě. Prezentace pro studenty z předešlých let si
můžete prohlédnout:
zde a
zde.
Prezentace z přednášky
Videozáznam z přednášky
 Pavel Krsek je odborníkom na strojové vnímanie a robotiku so zameraním na priemyselné
aplikácie. Pôsobí ako vedecký pracovník v Robotic perception group (u prof. Hlaváča) v
Českém institutu informatiky, robotiky a kybernetiky (CIIRC) na Českém vysokém učení
technickém (ČVUT) v Prahe. Je autorom viacerých vedeckých publikácii najmä v oblasti
spracovania 3D dát, ako i technických a pedagogických riešení v oblasti robotiky.
Pavel Krsek je odborníkom na strojové vnímanie a robotiku so zameraním na priemyselné
aplikácie. Pôsobí ako vedecký pracovník v Robotic perception group (u prof. Hlaváča) v
Českém institutu informatiky, robotiky a kybernetiky (CIIRC) na Českém vysokém učení
technickém (ČVUT) v Prahe. Je autorom viacerých vedeckých publikácii najmä v oblasti
spracovania 3D dát, ako i technických a pedagogických riešení v oblasti robotiky.
- 5. 5. 2021, 17:30-19:00, on-line (46. prednáška)František Brabec: NASA Space Robotics Challenge
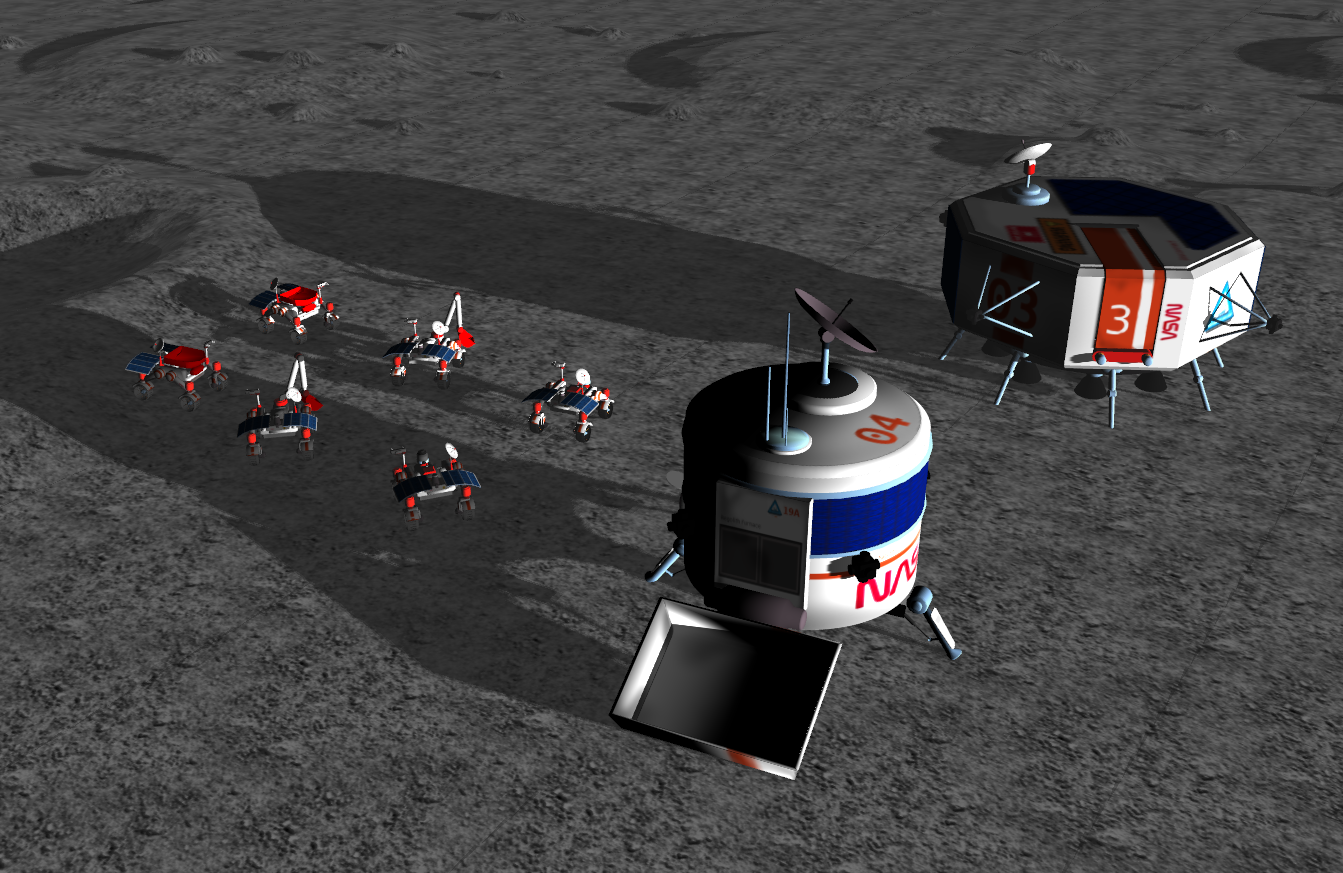 V rámci přípravy na dlouhodobý pobyt astronautů na Měsíci NASA vyhlásila několik soutěží s cílem podpořit vývoj nových technologií potřebných
pro tuto misi. Jedna z těchto soutěží - NASA Space Robotics Challenge Phase 2
se týká průzkumu měsíčního povrchu s cílem najít různé suroviny (led, metan, a pod.), po nálezu jejich vykopání a dovezení
na základnu pro další zpracování - to vše naprosto autonomní a automatické. Pro řešení této úlohy NASA poskytla robotické
vozítka se čtyřmi koly, každé nezávisle řízené a poháněné. Sensory zahrnují 2D lidar, stereo kameru a IMU. V této prezentaci
představíme řešení našeho týmu, t.j. strategii kterou tým robotů implementuje, architekturu systému který řídí každého robota a
výsledky, kterých zatím dosahujeme.
V rámci přípravy na dlouhodobý pobyt astronautů na Měsíci NASA vyhlásila několik soutěží s cílem podpořit vývoj nových technologií potřebných
pro tuto misi. Jedna z těchto soutěží - NASA Space Robotics Challenge Phase 2
se týká průzkumu měsíčního povrchu s cílem najít různé suroviny (led, metan, a pod.), po nálezu jejich vykopání a dovezení
na základnu pro další zpracování - to vše naprosto autonomní a automatické. Pro řešení této úlohy NASA poskytla robotické
vozítka se čtyřmi koly, každé nezávisle řízené a poháněné. Sensory zahrnují 2D lidar, stereo kameru a IMU. V této prezentaci
představíme řešení našeho týmu, t.j. strategii kterou tým robotů implementuje, architekturu systému který řídí každého robota a
výsledky, kterých zatím dosahujeme.
K dispozícii je záznam prednášky na Youtube, prezentácia.
 František Brabec žije v Annapolis, Maryland, USA a působí jako Solutions Architect ve společnosti
Robotika International. Vystudoval University of Maryland obor Computer Science kde získal titul PhD.
František Brabec žije v Annapolis, Maryland, USA a působí jako Solutions Architect ve společnosti
Robotika International. Vystudoval University of Maryland obor Computer Science kde získal titul PhD.
7. 4. 2021, 17:30-19:00, on-line (45. prednáška)Gabriela Šejnová: Propojování vidění, motoriky a přirozeného jazyka v kognitivní robotice
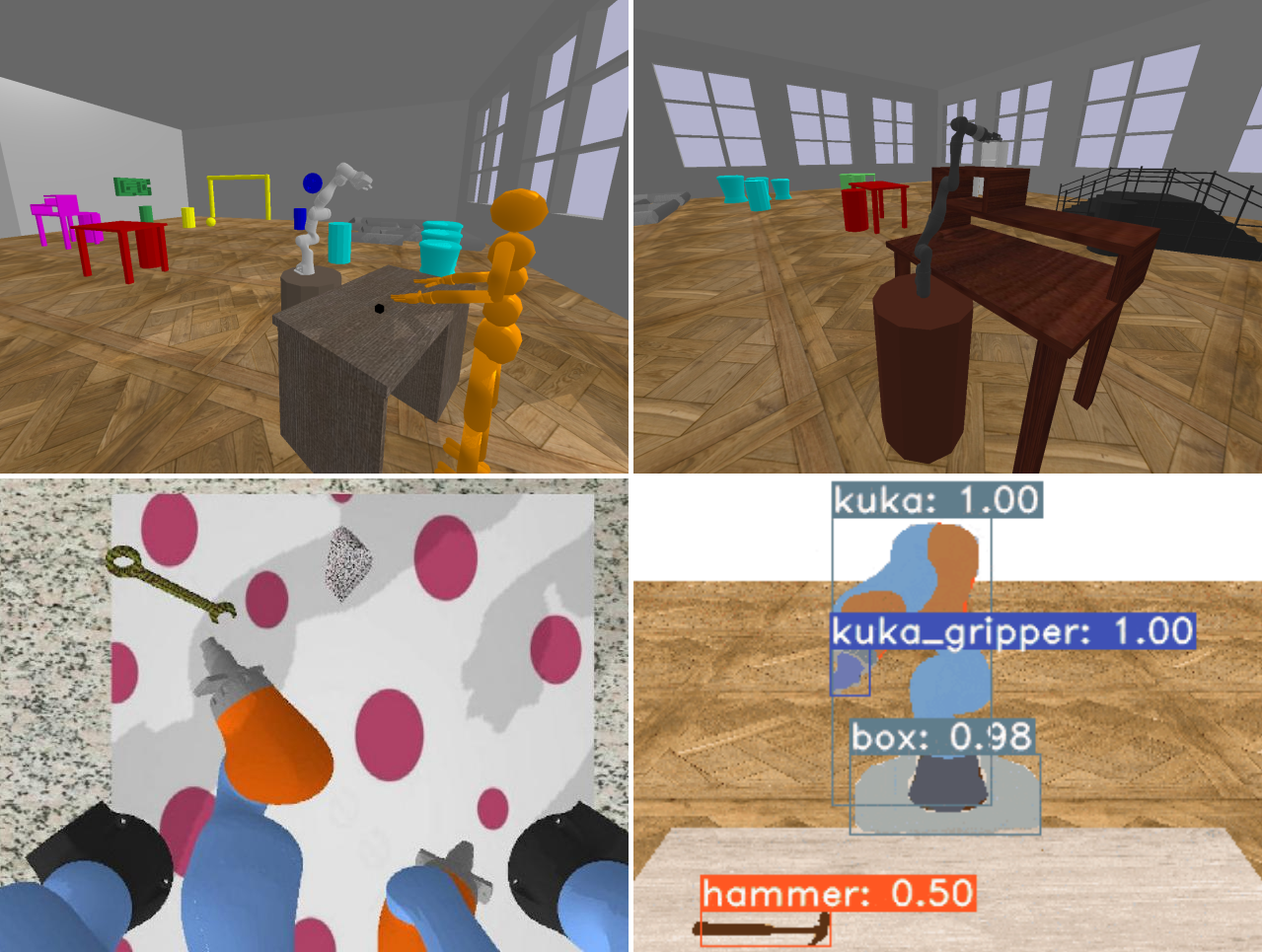 Přednáška se zabývá současnými metodami strojového učení na poli kognitivní
robotiky. Dozvíte se, jaké principy fungování lidského mozku se dají použít při
vývoji robotů. Popsány budou modulární neuronové sítě a jejich aplikace v posilovaném
učení. Následně bude předvedena jejich možná implementace v námi vyvinutém robotickém
simulátoru myGym, zaměřeném na trénování vizuomotorických úloh.
Link na software https://github.com/incognite-lab/myGym
Přednáška se zabývá současnými metodami strojového učení na poli kognitivní
robotiky. Dozvíte se, jaké principy fungování lidského mozku se dají použít při
vývoji robotů. Popsány budou modulární neuronové sítě a jejich aplikace v posilovaném
učení. Následně bude předvedena jejich možná implementace v námi vyvinutém robotickém
simulátoru myGym, zaměřeném na trénování vizuomotorických úloh.
Link na software https://github.com/incognite-lab/myGym
K dispozícii je záznam prednášky na Youtube, prezentácia. Gabriela Šejnová je studentkou doktorského oboru Umělá inteligence a biokybernetika
na FEL ČVUT v Praze. Pracuje v Českém institutu informatiky, robotiky a kybernetiky
(CIIRC) ČVUT ve skupině Kognitivního modelování vedené Michalem Vavrečkou.
V rámci své dizertace se zabývá generativními modely pro ukotvování přirozeného jazyka.
Gabriela Šejnová je studentkou doktorského oboru Umělá inteligence a biokybernetika
na FEL ČVUT v Praze. Pracuje v Českém institutu informatiky, robotiky a kybernetiky
(CIIRC) ČVUT ve skupině Kognitivního modelování vedené Michalem Vavrečkou.
V rámci své dizertace se zabývá generativními modely pro ukotvování přirozeného jazyka.
3. 3. 2021, 17:30-19:00, on-line (lecture 44)Robotour miniconference II.
 Robotour is a traditional outdoor competition of autonomous robots, which should be able to bring useful payload from the point
A to point B, usually in a park. At this miniconference you will see presentations of the best teams from
last year, in which they will show you how their robot works and what software it uses. We welcome Istrobotics teams
(lectured by Rado Kováč) from Bratislava, AmBot (Aleš Holub) from Czech Most, Swiss Cogito (Jirka Iša) and possibly
JECC from Germany (Bernhard Mayer). You will learn a lot
information that you will not find elsewhere, whether about the construction of the robot into the external environment, about the processing software
image and navigation, but also a wealth of practical experience and solving hundreds of small practical problems that
occurred at the same time. Presentation will be in english.
Robotour is a traditional outdoor competition of autonomous robots, which should be able to bring useful payload from the point
A to point B, usually in a park. At this miniconference you will see presentations of the best teams from
last year, in which they will show you how their robot works and what software it uses. We welcome Istrobotics teams
(lectured by Rado Kováč) from Bratislava, AmBot (Aleš Holub) from Czech Most, Swiss Cogito (Jirka Iša) and possibly
JECC from Germany (Bernhard Mayer). You will learn a lot
information that you will not find elsewhere, whether about the construction of the robot into the external environment, about the processing software
image and navigation, but also a wealth of practical experience and solving hundreds of small practical problems that
occurred at the same time. Presentation will be in english.
Meeting link: https://meet.google.com/vug-zcfp-ubf.
 The Istrobotics team from Bratislava is closely connected with the Robotika.SK association.
They participate Robotour competition since its inception in 2006 and they also won in 2016.
The basis of their robot is a modified RC model TRAXXAS E-MAXX (3903). The robot is equipped
with an Intel RealSense D435 depth camera, GPS, RPLIDAR A1, HC-SR04 sonar, IMU with a 3D
compass and magnetic IRC. The robot control and basic sensors are processed by Arduino Mega.
The main control unit is NVIDIA Jetson Nano processing the neural network image management,
lidar processing, localization and navigation. The robot is programmed in C++ using the
TensorFlow and OpenCV libraries.
The Istrobotics team from Bratislava is closely connected with the Robotika.SK association.
They participate Robotour competition since its inception in 2006 and they also won in 2016.
The basis of their robot is a modified RC model TRAXXAS E-MAXX (3903). The robot is equipped
with an Intel RealSense D435 depth camera, GPS, RPLIDAR A1, HC-SR04 sonar, IMU with a 3D
compass and magnetic IRC. The robot control and basic sensors are processed by Arduino Mega.
The main control unit is NVIDIA Jetson Nano processing the neural network image management,
lidar processing, localization and navigation. The robot is programmed in C++ using the
TensorFlow and OpenCV libraries.
 The AmBot team is from the Czech city of Most. They first Robotour participation is since 2014.
Their robot Ferda is modified children electric vehicle controlled by the Arduino Mega. Has also
compass and ultrasonic sensor together with lidar for obstacle detection. Main controller is a
smartphone with original Android app RoboNav for map orienteering with complementary vizual navigation
using the smartphone camera.
The AmBot team is from the Czech city of Most. They first Robotour participation is since 2014.
Their robot Ferda is modified children electric vehicle controlled by the Arduino Mega. Has also
compass and ultrasonic sensor together with lidar for obstacle detection. Main controller is a
smartphone with original Android app RoboNav for map orienteering with complementary vizual navigation
using the smartphone camera.
 The JECC team is from Bavarian (Germany) town Deggendorf. Their JECCbot mini robot is an outdoor
robotics platform intended for participation in contests but also for general robotic experiments.
It has mounting positions for Arduino Uno and Mega boards. The chassis is 40 cm long and 20 cm wide.
The whole robot with ultrasonic sensors weights about 1.5 kg.
The JECC team is from Bavarian (Germany) town Deggendorf. Their JECCbot mini robot is an outdoor
robotics platform intended for participation in contests but also for general robotic experiments.
It has mounting positions for Arduino Uno and Mega boards. The chassis is 40 cm long and 20 cm wide.
The whole robot with ultrasonic sensors weights about 1.5 kg.
 Swiss/Czech team Cogito built their Freyja robot in a very short time for the exploration of
underground spaces in the DARPA Subterranean Challenge. This gives it unique features, such
as front-rear symmetry and the ability to drive through worse terrain. Driven by four PID controlled
hubmotors with encoders and equipped also with high speed stereocams, IMU and SICK Lidars.
Swiss/Czech team Cogito built their Freyja robot in a very short time for the exploration of
underground spaces in the DARPA Subterranean Challenge. This gives it unique features, such
as front-rear symmetry and the ability to drive through worse terrain. Driven by four PID controlled
hubmotors with encoders and equipped also with high speed stereocams, IMU and SICK Lidars.
3. 2. 2021, 17:30-19:00, on-line (43. prednáška)Robotour minikonferencia I.
Robotour je už tradičná outdoorová súťaž autonómnych robotov, ktorí by mali dokázať odviezť v niektorom parku užitočný
náklad z bodu A do bodu B. Na tomto pravidelnom seminári Robotika.SK uvidíte prezentácie troch najlepších tímov z
uplynulého roka, v ktorých vám ukážu, ako ten ich robot funguje a aký software používa. Privítame tímy Istrobotics
(prednáša Rado Kováč) z Bratislavy, NDTeam (Pavel Skoták) z Blanska a ARBot (Aleš Ruda) z Prahy. Dozviete sa mnoho
informácií, ktoré inde nenájdete, či už o konštrukcii robota do vonkajšieho prostredia, o softvéroch na spracovanie
obrazu a navigáciu, ale aj množstvo praktických skúseností a riešenia stoviek malých praktických problémov, ktoré
sa popritom vyskytli.
K dispozícii je záznam prednášky na Youtube a prezentácie tímov Istrobotics (+ gitHub), ARBot a NDteam. Tu je aj prepis diskusie, ktorá prebehla čiastočne aj písomne.
Tím Istrobotics pochádza z Bratislavy a je úzko spätý so združením Robotika.SK. Súťaže Robotour
sa zúčastňuje od jej vzniku v roku 2006 a v roku 2016 aj zvíťazili.
Základ robota je upravený RC model TRAXXAS E-MAXX (3903). Senzoricky je robot vybavený hĺbkovou kamerou Intel
RealSense D435, GPS, RPLIDARom A1, sonarmi HC-SR04, IMU s 3D kompasom a magnetickým IRC. Riadenie robota a základné
senzory spracováva Arduino Mega. Hlavnou riadiacou jednotkou je NVIDIA Jetson Nano. Medzi jej úlohy patrí spravovanie
obrazu pomocou neuronovej siete, spracovanie lidaru, lokalizácia a navigácia. Robot je naprogramovaný v C++.
Využíva knižnice TensorFlow a OpenCV.
 Tím NDTeam je z moravského mestečka Blansko. V súťaži Robotour patrí tiež medzi ostrieľaných účastníkov, zúčastňuje sa jej od roku 2014.
Ich 24 kg ťažký robot Robík má štvorkolesový podvozok riadený šmykom inšpirovný robotom Orpheus.
Riadiaca jednotka CortexPilot (Cortex M3) pre prácu v reálnom čase je doplnená o externý magnetometer, GPS, 5x sonar SRF02 a externý displej. Okrem toho má jednoduchý dvojosý
gimbal pre polohovanie kamery a je vybavený aj vykladačom golfových loptičiek z 50 mm odpadovej rúrky a jedného serva. Samostatná riadiaca
jednotka Odroid XU4 má na starosti spracovanie videa, plánovánie trasy a obchádzanie prekážok
Tím NDTeam je z moravského mestečka Blansko. V súťaži Robotour patrí tiež medzi ostrieľaných účastníkov, zúčastňuje sa jej od roku 2014.
Ich 24 kg ťažký robot Robík má štvorkolesový podvozok riadený šmykom inšpirovný robotom Orpheus.
Riadiaca jednotka CortexPilot (Cortex M3) pre prácu v reálnom čase je doplnená o externý magnetometer, GPS, 5x sonar SRF02 a externý displej. Okrem toho má jednoduchý dvojosý
gimbal pre polohovanie kamery a je vybavený aj vykladačom golfových loptičiek z 50 mm odpadovej rúrky a jedného serva. Samostatná riadiaca
jednotka Odroid XU4 má na starosti spracovanie videa, plánovánie trasy a obchádzanie prekážok
 Tím ARBot je z Prahy a Robotour navštevujú od roku 2009, v roku 2013 dokonca zvíťazili. Ich robot je riadený jednodoskovým PC
UP2 so štvorjadrovým procesorom Intel N4200 a OS Windows 10.
Ako hlavná programovacia platforma sú použité .NET a jazyk C#. Robot z 2 mm preglejky má diferenciálny podvozok s tretím
pasívnym kolieskom. Robot má AHRS VectorNav VN-100, okrem toho GPS uBlox NEO 7M a sadu kamier Intel RealSense D435 a T265.
Tím ARBot je z Prahy a Robotour navštevujú od roku 2009, v roku 2013 dokonca zvíťazili. Ich robot je riadený jednodoskovým PC
UP2 so štvorjadrovým procesorom Intel N4200 a OS Windows 10.
Ako hlavná programovacia platforma sú použité .NET a jazyk C#. Robot z 2 mm preglejky má diferenciálny podvozok s tretím
pasívnym kolieskom. Robot má AHRS VectorNav VN-100, okrem toho GPS uBlox NEO 7M a sadu kamier Intel RealSense D435 a T265.
13. 1. 2021, 17:30-19:00, on-line (42. prednáška)Richard Balogh - Andrej Lúčny: Mobilný telefón ako palubný počítač na robotovi
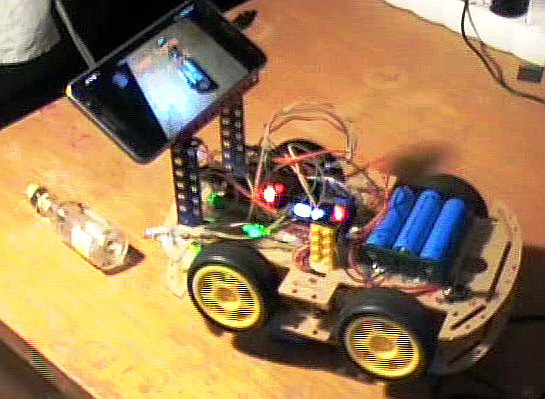 Mobilný telefón je pomerne výkonné výpočtové zariadenie malých rozmerov so zabudovanou kamerou.
Je preto vhodným doplnkom výpočtovo slabšej palubnej dosky mobilného robota, obzvlášť vhodný je na
spracovanie obrazu pomocou modelov hlbokého učenia. Pre mobilné telefóny boli vyvinuté vhodné architektúry
ako napríklad MobileNet, ktoré sú použiteľné aj bez GPU. Tieto vedia klasifikovať či detekovať viaceré typy objektov,
pričom môžeme použiť predtrénované modely alebo natrénovať vlastné z nami pripraveného datasetu. Problémom ostáva
komunikácia mobilného telefónu s hardwarom robota. Tá sa dá s určitými obmedzeniami realizovať cez OTG kábel.
Prevedieme ako toto nastavenie realizovať pomocou mobilného telefónu s OS Android prepojeným s Arduino Nano, ktoré riadi
robota OpenBot. Používať budeme knižnicu OpenCV pre Android, programovací jazyk Java a Arduino.
Prezentácia je dostupná na http://www.robotika.sk/seminar/2021/robotikask-openbot.pdf
Mobilný telefón je pomerne výkonné výpočtové zariadenie malých rozmerov so zabudovanou kamerou.
Je preto vhodným doplnkom výpočtovo slabšej palubnej dosky mobilného robota, obzvlášť vhodný je na
spracovanie obrazu pomocou modelov hlbokého učenia. Pre mobilné telefóny boli vyvinuté vhodné architektúry
ako napríklad MobileNet, ktoré sú použiteľné aj bez GPU. Tieto vedia klasifikovať či detekovať viaceré typy objektov,
pričom môžeme použiť predtrénované modely alebo natrénovať vlastné z nami pripraveného datasetu. Problémom ostáva
komunikácia mobilného telefónu s hardwarom robota. Tá sa dá s určitými obmedzeniami realizovať cez OTG kábel.
Prevedieme ako toto nastavenie realizovať pomocou mobilného telefónu s OS Android prepojeným s Arduino Nano, ktoré riadi
robota OpenBot. Používať budeme knižnicu OpenCV pre Android, programovací jazyk Java a Arduino.
Prezentácia je dostupná na http://www.robotika.sk/seminar/2021/robotikask-openbot.pdf
K dispozícii je záznam prednášky na Youtube, prezentácia I a prezentácia II.
 Richard Balogh pochádza z Bratislavy a pôsobí na Ústave automobilovej mechatroniky na Fakulte elektrotechniky a
informatiky na STU v Bratislave. Študoval na Elektrotechnickej fakulte, kde na Ústave robotiky a
kybernetiky získal PhD. Je zakladateľom občianskeho združenia Robotika.SK a hlavným organizátorom
súťaže mobilných robotov ISTROBOT. Je spoluzakladateľom konferencie Robotics in Education.
Richard Balogh pochádza z Bratislavy a pôsobí na Ústave automobilovej mechatroniky na Fakulte elektrotechniky a
informatiky na STU v Bratislave. Študoval na Elektrotechnickej fakulte, kde na Ústave robotiky a
kybernetiky získal PhD. Je zakladateľom občianskeho združenia Robotika.SK a hlavným organizátorom
súťaže mobilných robotov ISTROBOT. Je spoluzakladateľom konferencie Robotics in Education.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave,
kde vyštudoval odbor umelá inteligencia a získal doktorát z aplikovanej informatiky.
Je spoluzakladateľom občianskeho združenia Robotika.SK.
2. 12. 2020, 17:30-19:00, on-line (41. prednáška)Adam Trizuljak: Autonómne drony Skydio
 Americká firma Skydio vyrába autonómne drony. S pomocou navigačných kamier si tvoria 360° mapu lokálneho prostredia, vďaka
ktorej sa vedia vyhýbať prekážkam vo všetkých smeroch. Tieto drony sú určené predovšetkým na natáčanie ľudí počas športových
aktivít, ale ich vysoká miera autonómie a jednoduchosť používania otvárajú príležitosti pre mnohé nové aplikácie dronov,
ktoré doteraz vyžadovali skúseného ľudského pilota. V tejto prednáške predstavíme drony spoločnosti Skydio, ich inovatívne
aplikácie a priblížime fungovanie ich systému autonómneho letu.
K dispozícii je záznam prednášky na Youtube, slajdy žiaľ nie je
možné zverejniť.
Americká firma Skydio vyrába autonómne drony. S pomocou navigačných kamier si tvoria 360° mapu lokálneho prostredia, vďaka
ktorej sa vedia vyhýbať prekážkam vo všetkých smeroch. Tieto drony sú určené predovšetkým na natáčanie ľudí počas športových
aktivít, ale ich vysoká miera autonómie a jednoduchosť používania otvárajú príležitosti pre mnohé nové aplikácie dronov,
ktoré doteraz vyžadovali skúseného ľudského pilota. V tejto prednáške predstavíme drony spoločnosti Skydio, ich inovatívne
aplikácie a priblížime fungovanie ich systému autonómneho letu.
K dispozícii je záznam prednášky na Youtube, slajdy žiaľ nie je
možné zverejniť.
 Adam Trizuljak je začínajúci doktorand na Ústave robotiky a kybernetiky na FEI STU. Počas svojho doterajšieho
štúdia absolvoval stáže v Centre robotiky a mechatroniky Nemeckej vesmírnej agentúry (DLR) a vo firme Skydio.
V rámci týchto stáží sa venoval vývoju multi-dronových systémov a ich aplikáciám. Hlavným zameraním jeho PhD
štúdia budú metódy pre autonómnu navigáciu dronov.
Adam Trizuljak je začínajúci doktorand na Ústave robotiky a kybernetiky na FEI STU. Počas svojho doterajšieho
štúdia absolvoval stáže v Centre robotiky a mechatroniky Nemeckej vesmírnej agentúry (DLR) a vo firme Skydio.
V rámci týchto stáží sa venoval vývoju multi-dronových systémov a ich aplikáciám. Hlavným zameraním jeho PhD
štúdia budú metódy pre autonómnu navigáciu dronov.
4. 11. 2020, 17:30-19:00, on-line. (40. prednáška)Vítezslav Beran: Kolaboratívna robotika
 Prednáška bude venovaná kolaborácii človek - robot vo výrobnom procese, ktorá
vyžaduje integráciu viacerých technológii od počítačového videnia po rozšírenú realitu.
Ako príklad uvedieme robota ARCOR (Augmented Reality Cooperative Robot). (Prednáška bude v českom jazyku.)
Prednáška bude venovaná kolaborácii človek - robot vo výrobnom procese, ktorá
vyžaduje integráciu viacerých technológii od počítačového videnia po rozšírenú realitu.
Ako príklad uvedieme robota ARCOR (Augmented Reality Cooperative Robot). (Prednáška bude v českom jazyku.)
Zo seminára je dostupný videozáznam a slajdy bez videa.
 Vítezslav Beran pôsobí na Fakulte informačných technológii na Technickej univerzite v Brne.
Akademickú dráhu začal v Centre for Vision, Speech and Signal Processing na University of
Surrey. Z funkcie prodekana sa stará o kooperáciu výskumu s praxou.
Vítezslav Beran pôsobí na Fakulte informačných technológii na Technickej univerzite v Brne.
Akademickú dráhu začal v Centre for Vision, Speech and Signal Processing na University of
Surrey. Z funkcie prodekana sa stará o kooperáciu výskumu s praxou.
7. 10. 2020, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (39. prednáška)Marcus Vincze: V4R - The Intention to Make Robots See
 Prednáška bola venovaná bude venovaná výskumu skupiny V4R, ktorú na TU Wien vedie prednášajúci.
Prednáška bola v anglickom jazyku..
Zo seminára je dostupný:
videozáznam
Prednáška bola venovaná bude venovaná výskumu skupiny V4R, ktorú na TU Wien vedie prednášajúci.
Prednáška bola v anglickom jazyku..
Zo seminára je dostupný:
videozáznam
 Markus Vincze vedie laboratórium V4R (Vision for Robotics) na Technickej univerzite vo Viedni (TUW).
Je absolventom Rensselaerovho Polytechnického Inštitútu (USA). PhD získal na TUW v roku 1993.
Pôsobil taktiež v Laboratóriu pocítacového videnia na Yale University. Habilitáciu z robotiky
získal v roku 2004. S Gregorym Hagerom je editorom knihy Robust Vision. Je autorom mnohých
vedeckých clánkov a organizátorom viacerých vedeckých konferencii a iniciatív v oblasti
kognitívneho pocítacového videnia.
Markus Vincze vedie laboratórium V4R (Vision for Robotics) na Technickej univerzite vo Viedni (TUW).
Je absolventom Rensselaerovho Polytechnického Inštitútu (USA). PhD získal na TUW v roku 1993.
Pôsobil taktiež v Laboratóriu pocítacového videnia na Yale University. Habilitáciu z robotiky
získal v roku 2004. S Gregorym Hagerom je editorom knihy Robust Vision. Je autorom mnohých
vedeckých clánkov a organizátorom viacerých vedeckých konferencii a iniciatív v oblasti
kognitívneho pocítacového videnia.
2. 9. 2020, 17:30-19:00, FabLab, CVTI, Ilkovicova 8, Bratislava. (38. prednáška)Martin Supek: Tvorivá dieľna pre budúcich konštruktérov autonómnych vozidiel Predstavíme aktivitu vyvíjanú pod záštitou Fablabu, ktorej cieľom je viesť deti od jazdenia s autíčkami ku
ich návrhu, montáži a programovaniu. Jedným z prostriedkov tejto aktivity je Mato17 - stavebnica podvozkov
programovateľných vozdiel pre autodráhy.
Zo seminára sú dostupné:
Predstavíme aktivitu vyvíjanú pod záštitou Fablabu, ktorej cieľom je viesť deti od jazdenia s autíčkami ku
ich návrhu, montáži a programovaniu. Jedným z prostriedkov tejto aktivity je Mato17 - stavebnica podvozkov
programovateľných vozdiel pre autodráhy.
Zo seminára sú dostupné:
prezentácia video z prezentácie
videozáznam
 Martin Supek je študent automobilovej mechatroniky na FEI STU, ktorý sa dlhodobo venuje
technickým aktivitám pre mládež a to hlavne v Modelárskom klube v Púchove a od začiatku štúdia v
Bratislave aj v tvorivej dielni Fablab.
5. 8. 2020, 17:30-19:00, FabLab, CVTI, Ilkovicova 8, Bratislava. (13. cvičenie)Andrej Lúčny: Ovládanie simulovaného humanoida iCubSim z Python-u
Martin Supek je študent automobilovej mechatroniky na FEI STU, ktorý sa dlhodobo venuje
technickým aktivitám pre mládež a to hlavne v Modelárskom klube v Púchove a od začiatku štúdia v
Bratislave aj v tvorivej dielni Fablab.
5. 8. 2020, 17:30-19:00, FabLab, CVTI, Ilkovicova 8, Bratislava. (13. cvičenie)Andrej Lúčny: Ovládanie simulovaného humanoida iCubSim z Python-u Predstavíme knižnicu v jazyku Python, ktorá umožňuje poľahky ovládať jednotlivé údy simulovaného humanoidneho
robota a vyskúšame ju. S touto platformou sme sa už zaoberali v 2019/08 (cvičenie 11). Vtedy sme sa zamerali
ovládanie hlasom, teraz sa sústredíme na implementačné detaily platformy a možnosti reakcií robota na základe
spracovania obrazu.
Záujemci o aktívnu účasť potrebujú počítač so 64bit hw, usb kameru, os MS Windows
a Python 3.5, 3.6, 3.7 alebo 3.8 s opencv-contrib-python. Záujemci o podrobnejšie inštrukcie si o ne môžu požiadať
na andylucny@gmail.com. Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet. Na stiahnutie:
Balík so simulátorom,
knižnica pre python,
prezentácia a
videozáznam.
Predstavíme knižnicu v jazyku Python, ktorá umožňuje poľahky ovládať jednotlivé údy simulovaného humanoidneho
robota a vyskúšame ju. S touto platformou sme sa už zaoberali v 2019/08 (cvičenie 11). Vtedy sme sa zamerali
ovládanie hlasom, teraz sa sústredíme na implementačné detaily platformy a možnosti reakcií robota na základe
spracovania obrazu.
Záujemci o aktívnu účasť potrebujú počítač so 64bit hw, usb kameru, os MS Windows
a Python 3.5, 3.6, 3.7 alebo 3.8 s opencv-contrib-python. Záujemci o podrobnejšie inštrukcie si o ne môžu požiadať
na andylucny@gmail.com. Seminár sa bude konať vo Fablabe, avšak bude možné sa ho zúčastniť aj cez
internet. Na stiahnutie:
Balík so simulátorom,
knižnica pre python,
prezentácia a
videozáznam.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave,
kde vyštudoval odbor umelá inteligencia (u nestora UI prof. Jozefa Kelemena) a získal doktorát z aplikovanej informatiky.
Je spoluzakladateľom občianskeho združenia Robotika.SK. Pôsobil ako hlavný porotca Central European Regional
ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
1. 7. 2020, 17:30-19:00, on-line. (37. prednáška)Andrej Lúčny: JetBot JetBot je open-source robot na báze Jetson Nano od NVIDIA, určený pre aplikácie hlbokého učenia.
Jeho konštukciu si môže každý vytlačiť sám na 3D tlačiarni, zvyšok je o nastavení elektroniky a softvéru.
JetBot je open-source robot na báze Jetson Nano od NVIDIA, určený pre aplikácie hlbokého učenia.
Jeho konštukciu si môže každý vytlačiť sám na 3D tlačiarni, zvyšok je o nastavení elektroniky a softvéru.
Zo seminára sú dostupné: prezentácia, videozáznam.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave,
kde vyštudoval odbor umelá inteligencia (u nestora UI prof. Jozefa Kelemena) a získal doktorát z aplikovanej informatiky.
Je spoluzakladateľom občianskeho združenia Robotika.SK. Istý čas pôsobil ako hlavný porotca Central European Regional
ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
3. 6. 2020, 17:30-19:00, on-line (36. prednáška)Martin Dekan: Využitie LIDARu v robotike
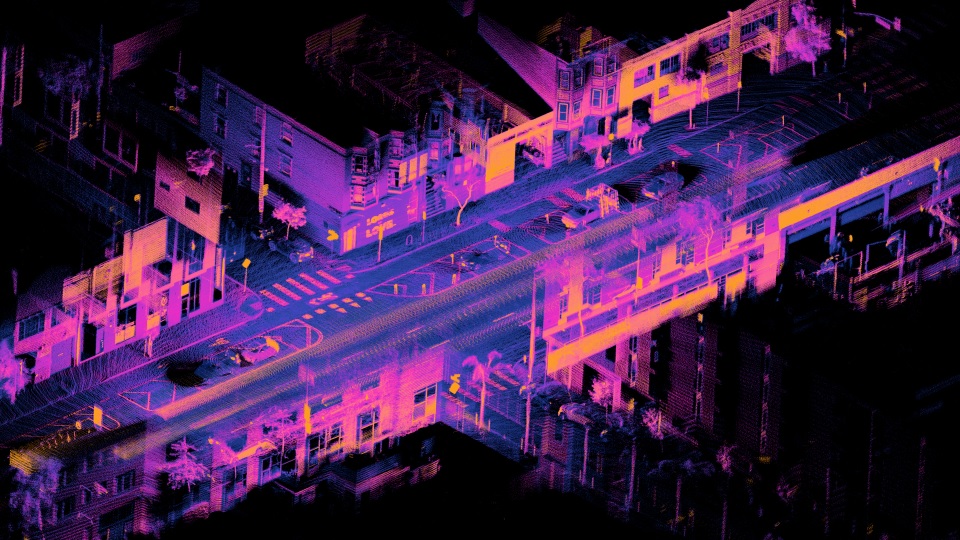 V prednáške sa dozviete o tom ako fungujú LIDAR senzory pre skenovanie prostredia, čo je vo vnútri zariadenia
a ako sa z meraných dát dostáva mračno bodov. Ak sa líšia rozličné typy a čo môžete od nich očakávať.
Ako sa získané dáta dajú využiť na riešenie problémov robotiky alebo navigácie autonómnych automobilov.
V prednáške sa dozviete o tom ako fungujú LIDAR senzory pre skenovanie prostredia, čo je vo vnútri zariadenia
a ako sa z meraných dát dostáva mračno bodov. Ak sa líšia rozličné typy a čo môžete od nich očakávať.
Ako sa získané dáta dajú využiť na riešenie problémov robotiky alebo navigácie autonómnych automobilov.
Zo seminára sú dostupné: prezentácia, videozáznam.
 Martin Dekan pôsobí ako výskumný pracovník na FEI STU, kde v roku 2014 získal titul PhD.
Je aj aktívnym členom Národného Centra Robotiky a dlhoročným porotcom súťaže Istrobot.
Vo svojej odbornej činnosti sa venuje pravdepodobnostnej lokalizícii, plánovaniu trajektórií
a spracovaniu údajov zo senzorov. Na Fakulte elektrotechniky vyučuje predmet
Riadenie mobilných robotov.
Martin Dekan pôsobí ako výskumný pracovník na FEI STU, kde v roku 2014 získal titul PhD.
Je aj aktívnym členom Národného Centra Robotiky a dlhoročným porotcom súťaže Istrobot.
Vo svojej odbornej činnosti sa venuje pravdepodobnostnej lokalizícii, plánovaniu trajektórií
a spracovaniu údajov zo senzorov. Na Fakulte elektrotechniky vyučuje predmet
Riadenie mobilných robotov.
6. 5. 2020, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (35. prednáška)Michal Adamík: Programovanie priemyselných robotov v prostredí Grasshopper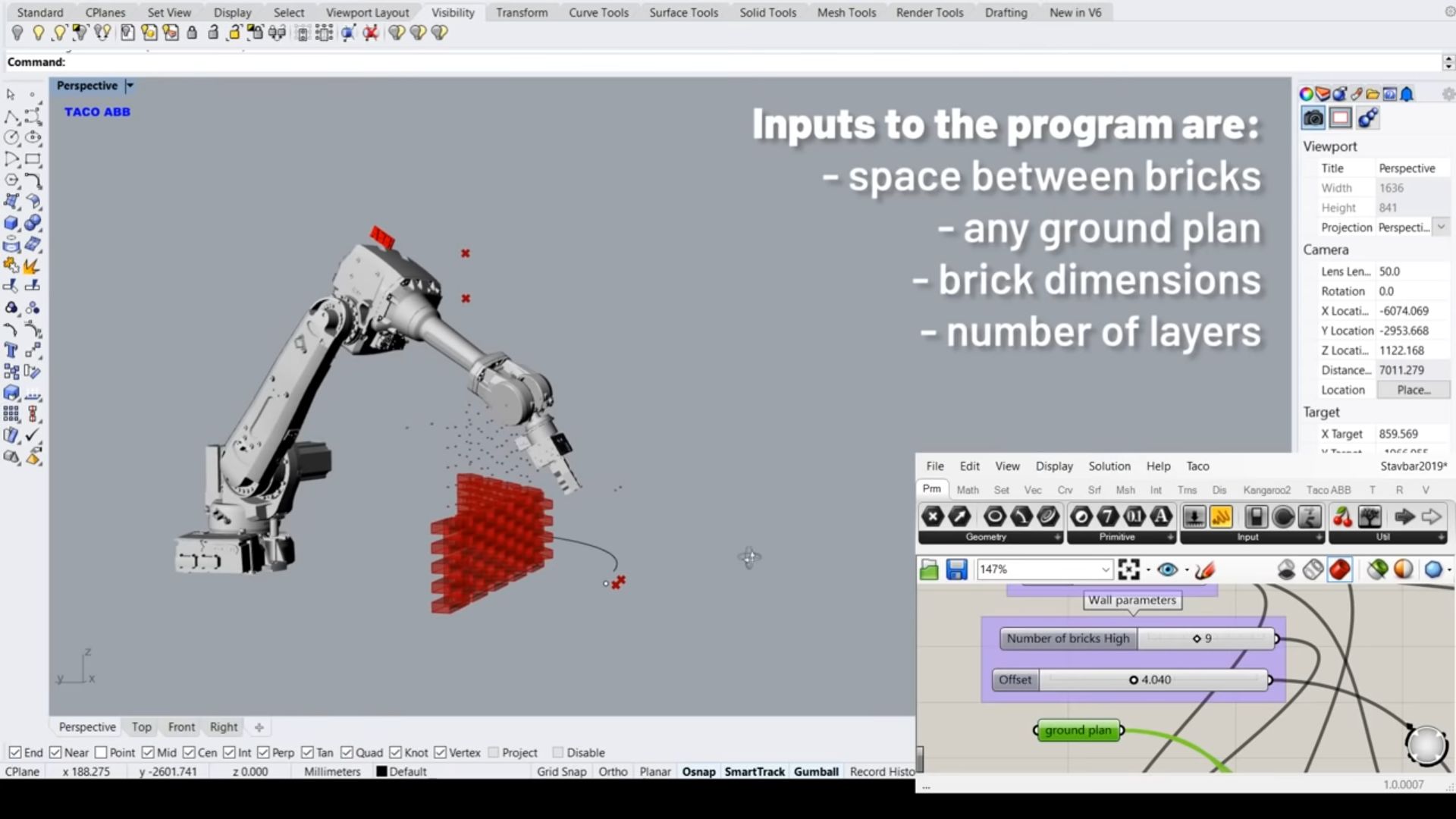 Programovanie v každej technologickej sfére ma svoje špecifiká a potreby. S požiadavkou na čoraz inteligentnejšie
robotické aplikácie sa vyvíjajú aj jazyky, ktorými ich programujeme. Grasshoper je graficky programovací jazyk 3D
softwaru Rhinoceros, ktorý so správnymi knižnicami umožňuje programovať aj pokročilé robotické aplikácie jednoduchšie
so zakladanými vedomosťami.
Programovanie v každej technologickej sfére ma svoje špecifiká a potreby. S požiadavkou na čoraz inteligentnejšie
robotické aplikácie sa vyvíjajú aj jazyky, ktorými ich programujeme. Grasshoper je graficky programovací jazyk 3D
softwaru Rhinoceros, ktorý so správnymi knižnicami umožňuje programovať aj pokročilé robotické aplikácie jednoduchšie
so zakladanými vedomosťami.
Zo seminára sú dostupné: prezentácia, videozáznam.
 Michal Adamík je absolventom FEI STU v Bratislave, v súčasnosti je študentom tretieho ročníka doktorandského štúdia
odboru robotika na FEI STU. Vo svojom štúdiu sa venuje parametrickému programovaniu a generovania programu pre
priemyselné roboty. Popri štúdiu pracuje pre koncern Siemens, kde sa sústredí na vývoj SCADA diaľničných systémov so
špecializáciou na UI a UX a generovanie databázových definícii. Pracoval na projektoch diaľnic D3 – Svrčinovec Skalité,
D1 – Hričovské Podhradie Lietavská Lúčka a Honkong Liantang.
Michal Adamík je absolventom FEI STU v Bratislave, v súčasnosti je študentom tretieho ročníka doktorandského štúdia
odboru robotika na FEI STU. Vo svojom štúdiu sa venuje parametrickému programovaniu a generovania programu pre
priemyselné roboty. Popri štúdiu pracuje pre koncern Siemens, kde sa sústredí na vývoj SCADA diaľničných systémov so
špecializáciou na UI a UX a generovanie databázových definícii. Pracoval na projektoch diaľnic D3 – Svrčinovec Skalité,
D1 – Hričovské Podhradie Lietavská Lúčka a Honkong Liantang.
4. 3. 2020, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (34. prednáška)Viktor Kocur: Detekcia objektov pomocou algoritmu RANSAC
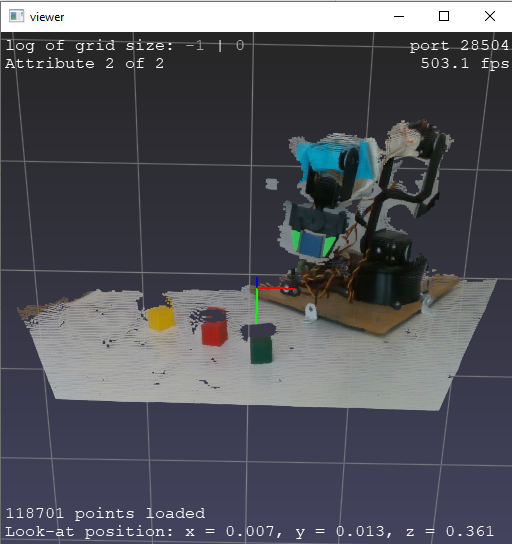 Prednáška bude prezentovať postup riešenia problému detekcie jednoduchých objektov pre účely interakcie robota s
človekom. V snímke z hĺbkovej kamery realizujeme segmentáciu objektov pomocou farebného priestoru CIE Lab a
algoritmu Mean Shift. Následne využijeme metódu RANSAC v kombinácii so znalosťou geometrie objektov a iných
trikov na detekciu ich pozície. V rámci prednášky si ukážeme ako všetky relevantné postupy vektorizovať
vďaka Pythonovskej knižnici NumPy a poznatkov z lineárnej algebry.
Prednáška bude prezentovať postup riešenia problému detekcie jednoduchých objektov pre účely interakcie robota s
človekom. V snímke z hĺbkovej kamery realizujeme segmentáciu objektov pomocou farebného priestoru CIE Lab a
algoritmu Mean Shift. Následne využijeme metódu RANSAC v kombinácii so znalosťou geometrie objektov a iných
trikov na detekciu ich pozície. V rámci prednášky si ukážeme ako všetky relevantné postupy vektorizovať
vďaka Pythonovskej knižnici NumPy a poznatkov z lineárnej algebry.
Zo seminára sú dostupné: prezentácia videozáznam
 Viktor Kocur je absolvent informatickej fyziky na ČVUT, toho času pôsobí ako doktorand na KAI FMFI UK
v Bratislave. Venuje sa počítačovému videniu, hlavne detekcii objektov v 3D.
Viktor Kocur je absolvent informatickej fyziky na ČVUT, toho času pôsobí ako doktorand na KAI FMFI UK
v Bratislave. Venuje sa počítačovému videniu, hlavne detekcii objektov v 3D.
5. 2. 2020, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (33. prednáška)Michal Chovanec: Hlboké učenie pre robota sledujúceho čiaru
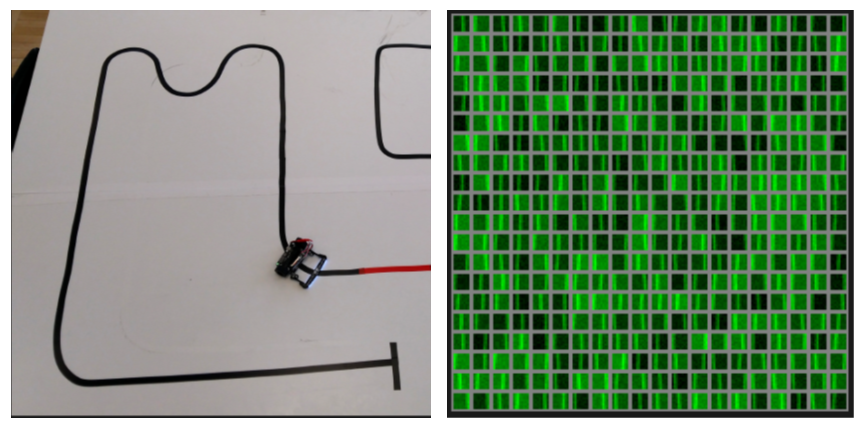 Prednáška pojednáva o použití konvolučnej neurónovej siete pre riadenie robota sledujúceho čiaru. Táto sieť
z niekoľkých po sebe idúcich meraní klasifikuje krivosť čiary, vďaka čomu robot dokáže akcelerovať na rovinkách.
Zatáčanie a riadenie motorov zabezpečujú konvenčné PID regulátory.
Prednáška pojednáva o použití konvolučnej neurónovej siete pre riadenie robota sledujúceho čiaru. Táto sieť
z niekoľkých po sebe idúcich meraní klasifikuje krivosť čiary, vďaka čomu robot dokáže akcelerovať na rovinkách.
Zatáčanie a riadenie motorov zabezpečujú konvenčné PID regulátory.
Samotná sieť vidí maticu dát zo senzorov, 8x8. Keďže sú kladené požiadavky na reálny čas (vzorkovanie 200Hz) sieť musí byť dobre optimalizovaná. Toto je neľahká úloha pre malý mcu, cortex m4f, 72MHz.
Aktuálna sieť ma architektúru s dvoma konvolučnými vrstvami - šetrilo sa na každom kernele : IN1x8x8 - C3x3x4 - P2x2 - C3x3x8 - P2x2 - FC5 a klasifikuje do 5 typov zákrut, s viac ako 97% úspešnosťou
Ukážem preto niektoré typy ako získať z MCU maximum :
1. 8bitová kvantizácia váh aj aktivácií
2. optimaliźacia nárokov na pamäť
3. optimalizácia konvolúcie pre rýchlosť (C++ templates, unrolling, SIMD instructions)
(Táto úloha sa samozrejme dá riešiť aj inak a jednoduchšie, ale pokrok je hlavne o skúšaní nových prístupov a hľadaní ich limitov)
Zo seminára sú dostupné: prezentácia videozáznam kódy na GitHub-e
Michal Chovanec je výskumník v oblasti umelej inteligencie a jej výpočtových prostriedkov. Pôsobí
vo firme Tachyum v Bratislave. PhD získal na Žilinskej univerzite. Okrem iných úspechov získal
zlatú medailu v súťaži ISTROBOT v kategórii Stopár. Vo voľnom čase sa venuje sa turistike,
lukostreľbe a bojovým umeniam.
8. 1. 2020, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (12. cvičenie)Andrej Lúčny: Od konvolučného autoencoderu ku sémantickej segmentácii Vysvetlíme základnú myšlienku hlbokého učenia a od nej prejdeme k segmentácii obrazu, t.j. procesu,
ktorý robotovi povie pre každý pixel na obraze, do ktorej kategórie objektov patrí. Používať budeme
platformu Python a Keras.
Zo seminára sú dostupné:
Vysvetlíme základnú myšlienku hlbokého učenia a od nej prejdeme k segmentácii obrazu, t.j. procesu,
ktorý robotovi povie pre každý pixel na obraze, do ktorej kategórie objektov patrí. Používať budeme
platformu Python a Keras.
Zo seminára sú dostupné:
prezentácia videozáznam
balík pre Python
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave,
kde vyštudoval odbor umelá inteligencia (u prof. Jozefa Kelemena) a získal doktorát z aplikovanej informatiky.
V značnej miere pôsobí v komerčnej sfére (ME-Inspection). Je spoluzakladateľom občianskych združení Robotika.SK a
Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným
porotcom súťaže mobilných robotov ISTROBOT.
4. 12. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (32. prednáška)Pavel Petrovič: Humanoidný robot lIllI
 Robot lIllI (čítaj: Lili), je humanoidný robot poskladaný z lepenkových dielcov vyrezaných na CNC stroji.
Je teda pomerne lacný, pričom na určité experimenty vyžadujúce, aby mal robot telo podobné človeku, stačí.
Ide pritom o open source, takže je široko dostupný. Na prezentácii bude prítomný aj sám robot, ktorého
zostrojil a oživil prednášajúci.
Robot lIllI (čítaj: Lili), je humanoidný robot poskladaný z lepenkových dielcov vyrezaných na CNC stroji.
Je teda pomerne lacný, pričom na určité experimenty vyžadujúce, aby mal robot telo podobné človeku, stačí.
Ide pritom o open source, takže je široko dostupný. Na prezentácii bude prítomný aj sám robot, ktorého
zostrojil a oživil prednášajúci.
Pavel Petrovič je odborný asistent na Katedre aplikovanej informatiky FMFI UK v Bratislave,
kde viedol viacero záverečných prác a výučbových predmetov z oblasti robotiky, často sa venuje
popularizačným aktivitám a súťažiam.
6. 11. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (31. prednáška)David Gustafík: Field Programmable Gate Array (FPGA)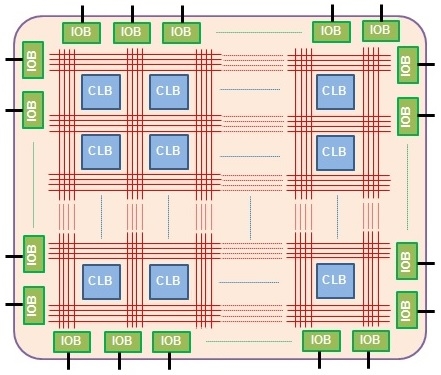 FPGA - pole logických členov programovatelné užívatelom - je druhom programovatelnej -
digitálnej logiky. Predstavuje preprogramovatelnú verziu hradlových polí poskytujúcu kvalitatívne iný
spôsob ako programovať počítač, úplne odlišný od von Neumanovej architektúry. Či je to spôsob aj lepší,
sa môžete prísť presvedčiť sami.
(záznam prednášky)
(prezentácia)
FPGA - pole logických členov programovatelné užívatelom - je druhom programovatelnej -
digitálnej logiky. Predstavuje preprogramovatelnú verziu hradlových polí poskytujúcu kvalitatívne iný
spôsob ako programovať počítač, úplne odlišný od von Neumanovej architektúry. Či je to spôsob aj lepší,
sa môžete prísť presvedčiť sami.
(záznam prednášky)
(prezentácia)

David Gustafík vyštudoval Fakultu Elektrotechniky a informatiky Slovenskej technickej univerzity v Bratislave. Je účastníkom viacerých robotických súťaží a venuje sa aj vzdelávaniu mládeže v oblasti robotiky. Pracuje vo firme MicroStep-MIS, kde vyvíja meterologické radary a ďalší hardvér.
2. 10. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (30. prednáška)Jozef Metke: Ako vychovať humanoidného robota (príklad: robot Robelf) Stretli sme sa naživo s Robelfom! Robelf je domáci humanoidný robot vyvinutý na Taiwane
Jeho cielom je pomáhať v domácnosti: strážiť deti, domácnosť, starých ludí, má Vám radiť
i zabávať Vás. Dá sa využiť aj ako klientský pracovník v biznis prostredí, napríklad
v bankách, múzeách, v reštauráciách, na rôznych konferenciách, či iných eventoch.
Vdaka mSolutions a RobotX Solutions sú dvaja Robelfovia aj na Slovensku a snažíme sa
ich vychovať pre život v Európskom prostredí.
(upútavka)
Stretli sme sa naživo s Robelfom! Robelf je domáci humanoidný robot vyvinutý na Taiwane
Jeho cielom je pomáhať v domácnosti: strážiť deti, domácnosť, starých ludí, má Vám radiť
i zabávať Vás. Dá sa využiť aj ako klientský pracovník v biznis prostredí, napríklad
v bankách, múzeách, v reštauráciách, na rôznych konferenciách, či iných eventoch.
Vdaka mSolutions a RobotX Solutions sú dvaja Robelfovia aj na Slovensku a snažíme sa
ich vychovať pre život v Európskom prostredí.
(upútavka)

Jozef Metke študoval na Univerzite Komenského a Ekonomickej univerzite v Bratislave, absolvoval študijné pobyty na E. M. Lyon a UGhent. Pôsobil v zahraničí a v roku 2006 sa vrátil na Slovensko, kde založil firmu mSolutions zaoberajúcu sa obchodovaním cez mobilné zariadenia a tomu zodpovedajúcou reklamou. Svoje pôsobenie rozšíril aj na outsourcing a mentoring pre start-upy. Získal viacero domácich a medzinárodných ocenení, je držitelom JCI Young Innovative Entrepreneur. Externe prednáša na Fakulte manažmentu Univerzity Komenského. V poslednom období sa venuje využitiu mobilných robotov v reklame i mimo nej a spolupracuje s výrobcom robota Robelf na jeho adaptácii pre európsky trh.
4. 9. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (29. prednáška)Camilo Parra Palacio: Build your own robot Otto is a robot that anyone can make. Otto started 3 years ago as a fully open source
passion driven project, with the goal of making robotics education accessible to
everyone and inspiring robot builders around the international community to be
creative while having fun.
Otto is a robot that anyone can make. Otto started 3 years ago as a fully open source
passion driven project, with the goal of making robotics education accessible to
everyone and inspiring robot builders around the international community to be
creative while having fun.

Camilo Parra Palacio from Medellin, Colombia, is a Product Design Engineer and the Founder of Otto DIY, in 2014 he got hired by an multinational in Shanghai to work as Industrial Designer. For 5 years in China, he was designing different inflatable products while at the same time creating robots in a maker and hacker space, it was there were he created multiple Kickstarter successful robots, including the worldwide known "Otto" a truly opensource robot. He has recently moved to the Czech Republic, to dedicate all his time and effort into the mission of making robotics accessible to everyone.
7. 8. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (11. cvičenie)Andrej Lúčny: iCubSim ovládaný hlasom.Pomocou volania kognitívnej webovej služby z Androidu budeme ovládať simulátor robota iCub. Je potrebné mať 64 bit notebook so 64 bit OS Windows a trochu vedieť programovať v jazyku Python. Zo seminára sú dostupné:
prezentácia videozáznam
balík pre Windows
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
3. 7. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (10. cvičenie)Andrej Lúčny: Detektor objektov YOLO v3.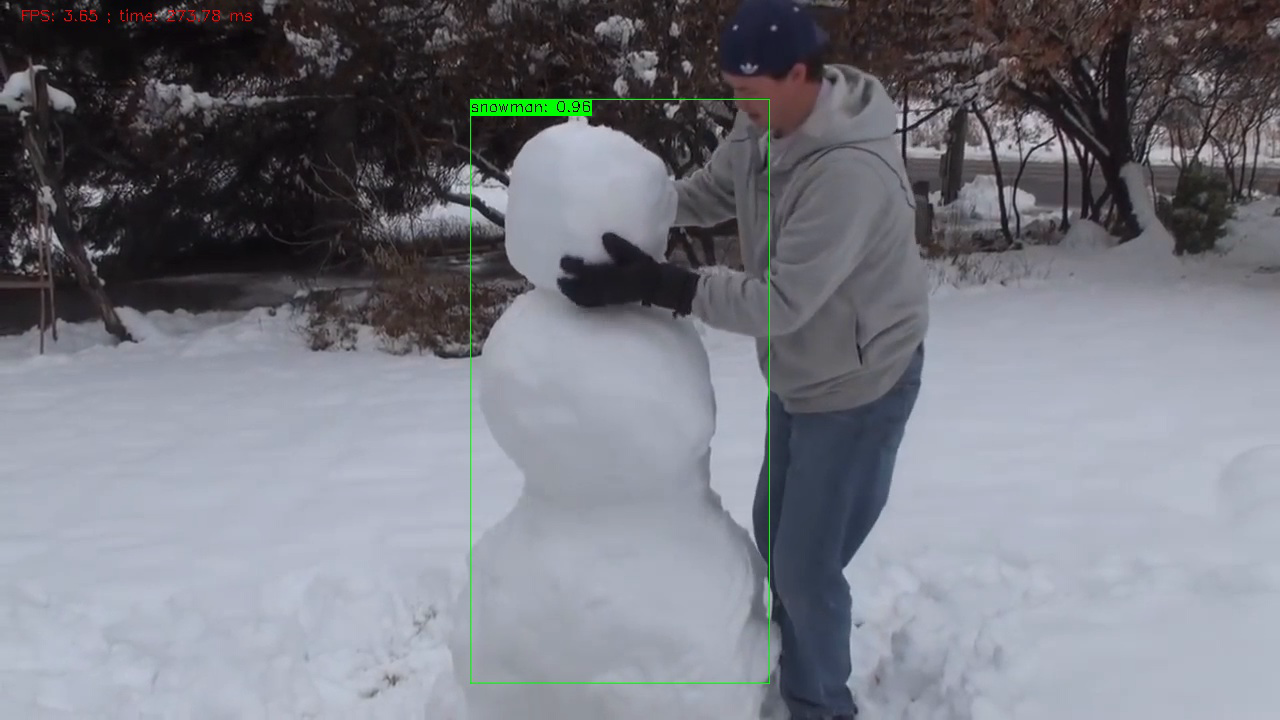 Pomocou hlbokej siete DarkNet vytvárame detektor objektu zadaný vzorkami jeho výskytu na obraze.
Zo seminára sú dostupné:
Pomocou hlbokej siete DarkNet vytvárame detektor objektu zadaný vzorkami jeho výskytu na obraze.
Zo seminára sú dostupné:
prezentácia videozáznam
balík pre Windows
binárky opencv pre Windows
balík pre Linux Ubuntu
video vytvorené Marekom Kollárikom, účastníkom seminára
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
5. 6. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (28. prednáška)Wilfried Lepuschitz: Introducing PRIA - Practical Robotics Institute of Austria Presentation in English about the educational activities in the PRIA
- Practical Robotics Institute of Austria. Educational robot Hedgehog
and its practical use with examples will be presented too.
(záznam prednášky)
(prezentácia)
Presentation in English about the educational activities in the PRIA
- Practical Robotics Institute of Austria. Educational robot Hedgehog
and its practical use with examples will be presented too.
(záznam prednášky)
(prezentácia)

Wilfried Lepuschitz works as Managing Director at Practical Robotics Institute Austria in Vienna. Graduated at the Technical University in Vienna, obtained his PhD. in the area of robotics. Also a visiting researcher at the Czech Technical University in Prague. Awarded Best Paper Award at ICIT 2013 conference.
3. 4. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (27. prednáška)Ján Bačík: Autonomny mobilny robot Phollower: od prototypu k priemyselnému výrobku V prezentácii sa dozviete (a uvidíte na vlastné oči) ako funguje prvý
Slovenský priemyselne vyrábaný a certifikovaný autonómny mobilný robot
Phollower 100. Čo dokáže okrem rozvážania špinavého prádla v Košickej
nemocnici, kde inde by sa ešte uplatnil, a na čo všetko sa dá použiť. Jeho
konštruktér vám priblíži, aká ďaleká je cesta od prototypu k výrobku,
ktorý spĺňa všetky požiadavky zákazníka i legislatívy. A dozviete sa aj
ako sa od súťaže Istrobot dostanete až k navrhovaniu takýchto robotov.
Video z prezentácie je k dispozícii tu
V prezentácii sa dozviete (a uvidíte na vlastné oči) ako funguje prvý
Slovenský priemyselne vyrábaný a certifikovaný autonómny mobilný robot
Phollower 100. Čo dokáže okrem rozvážania špinavého prádla v Košickej
nemocnici, kde inde by sa ešte uplatnil, a na čo všetko sa dá použiť. Jeho
konštruktér vám priblíži, aká ďaleká je cesta od prototypu k výrobku,
ktorý spĺňa všetky požiadavky zákazníka i legislatívy. A dozviete sa aj
ako sa od súťaže Istrobot dostanete až k navrhovaniu takýchto robotov.
Video z prezentácie je k dispozícii tu

Ján Bačík pôsobí ako vedúci vývoja AMR (autonomous mobile robot) v spoločnosti Photoneo, ktorá na trh uviedla svoj vlastný certifikovaný mobilný robot určený pre priemyselné aplikácie. Zároveň pôsobí ako odborný asistent na pôde Technickej univerzity v Košiciach, kde vyučuje predmety zameranú na automatizáciu priemyselných systémov.
6. 3. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava.
26. prednáškaIvan Masár: Návrh autonómnych mobilných robotov - Rapid Prototyping s využitím Matlab/Simulink-uV prednáške sa dozviete o projektoch riešených v minulosti na Fern University v Hagene. Spomenieme autonómnu vzducholoď na pozorovanie lesných požiarov ako aj malý mobilný robot F.A.A.K. riadený algoritmami umelej inteligenice. Robot mal digitálne dvojča a využival sa na on-line súťaž pre študentov. Na záver opíšeme aj všesmerový robot so špeciálnymi kolesami. Zmienime sa aj o spósobe návrhu týchto zariadení metódou rapid prototypingu.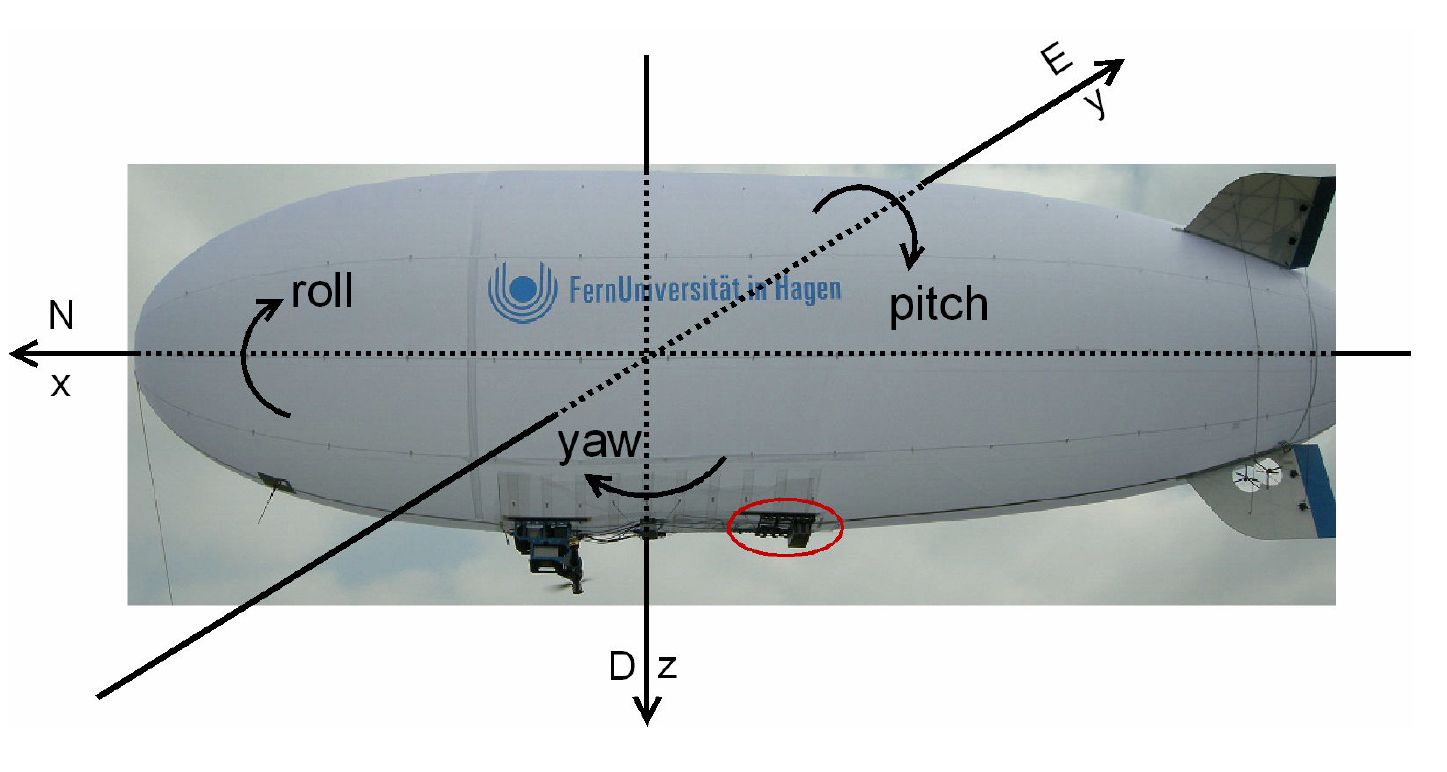
Tak sa označuje proces rýchleho návrhu funkčného modelu alebo zariadenia, podporovaný CAD modelovaním systému vo vrituálnej realite, 3D-tlačou, simuláciou fyzikálneho modelu a automatickým generovaním kódu pre riadiacu elektroniku. Vysvetlíme aj ako sa systém dá verifikovať a testovať s využitím SW- a HW-in-the-loop. (záznam prednášky)
 Ivan Masár je absolvoventom FEI STU v Bratislave. Po skončení školy sa v rámci doktorandského
štúdia a následnej výskumnej práci venoval mobilným robotom, či už pozemným alebo lietajúcim.
Od roku 2014 pracuje pre firmu TTTech, v ktorej sa venuje vývoju produktov pre robustné dátové
siete pre použitie v leteckom a vesmírnom priemysle. Vo voľnom čase sa venuje umeleckej fotografii
a známy je aj jedným z konštruktérov legendárneho robota F.A.A.K.
Ivan Masár je absolvoventom FEI STU v Bratislave. Po skončení školy sa v rámci doktorandského
štúdia a následnej výskumnej práci venoval mobilným robotom, či už pozemným alebo lietajúcim.
Od roku 2014 pracuje pre firmu TTTech, v ktorej sa venuje vývoju produktov pre robustné dátové
siete pre použitie v leteckom a vesmírnom priemysle. Vo voľnom čase sa venuje umeleckej fotografii
a známy je aj jedným z konštruktérov legendárneho robota F.A.A.K.
6. 2. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava.
25. prednáškaTomáš Krajník: Teach-and-repeat - visuální navigace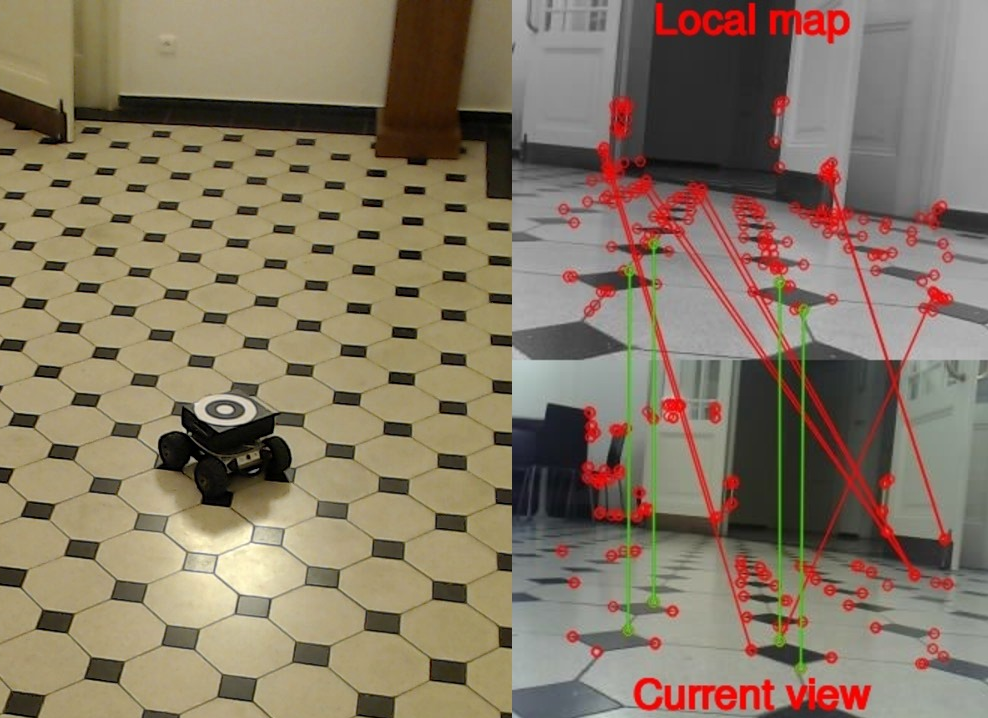 Schopnost samostatně absolvovat vytyčenou trasu je základní dovedností
mobilních robotů. Během semináře představíme systém, který umožňuje
mobilnímu robotu autonomně projet trasu, kterou se naučil během
teleoperované jízdy. Tento systém je výpočetně nenáročný, funguje i s
levnými kamerami a je robustní vůči změnám osvětlení. Systém byl úspěšně
odzkoušen na řadě pozemních i létajících robotů (např.
video) a jeho předchozí verze
zvítězila v soutěži RoboTour v roce 2008 a 2009.
Schopnost samostatně absolvovat vytyčenou trasu je základní dovedností
mobilních robotů. Během semináře představíme systém, který umožňuje
mobilnímu robotu autonomně projet trasu, kterou se naučil během
teleoperované jízdy. Tento systém je výpočetně nenáročný, funguje i s
levnými kamerami a je robustní vůči změnám osvětlení. Systém byl úspěšně
odzkoušen na řadě pozemních i létajících robotů (např.
video) a jeho předchozí verze
zvítězila v soutěži RoboTour v roce 2008 a 2009.
Zdrojové kódy systému jsou k dispozici na githube. V závěru semináře si zájemci, kteří si přinesou laptop s Ubuntu 16 nebo 18 a ROS Kinetic nebo Melodic, mohou systém sami odzkoušet i bez mobilního robotu jen s integrovanou kamerou.
Z prednášky sú dostupné [slajdy] a [videozáznam] na youtube kanáli Robotika.SK. Hlavnou oblasťou záujmu Tomáša Krajníka (ČVUT Praha) je mobilná robotika
a to najmä ich navigácia v premenlivom prostredí. Je autorom robustného
vizuálneho nabigačného algoritmu pre autonómne pozemné a lietajúce stroje
v exteriéri nezávislý od zmien počas ročných období. Je aj autorom modelu
neurčitosti stavu prostredia pomocou frekvenčných spektier, ktorý zlepšuje
dhodobú autonómnosť robota pohybyjúceho sa v premenlivom prostredí.
Jeho algoritmy boli implementované v knižniciach pre vizuálne sledovanie
a používajú ich aj v NASA, EPFL, KIT, AIT atď. Tomáš význame prispel aj
k úspechu tímu účastniaceho sa na súťaži Mohammed bin Zayeed Robotics
Challenge. Spolupracuje s niekoľkými výskumnými inštitúciami po celom svete,
svoje výsledky prezentoval okrem iného aj na MIT, UPENN a na Oxforde.
Hlavnou oblasťou záujmu Tomáša Krajníka (ČVUT Praha) je mobilná robotika
a to najmä ich navigácia v premenlivom prostredí. Je autorom robustného
vizuálneho nabigačného algoritmu pre autonómne pozemné a lietajúce stroje
v exteriéri nezávislý od zmien počas ročných období. Je aj autorom modelu
neurčitosti stavu prostredia pomocou frekvenčných spektier, ktorý zlepšuje
dhodobú autonómnosť robota pohybyjúceho sa v premenlivom prostredí.
Jeho algoritmy boli implementované v knižniciach pre vizuálne sledovanie
a používajú ich aj v NASA, EPFL, KIT, AIT atď. Tomáš význame prispel aj
k úspechu tímu účastniaceho sa na súťaži Mohammed bin Zayeed Robotics
Challenge. Spolupracuje s niekoľkými výskumnými inštitúciami po celom svete,
svoje výsledky prezentoval okrem iného aj na MIT, UPENN a na Oxforde.
9. 1. 2019, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (9. cvičenie)Andrej Lúčny: Rozpoznávanie tvárí pomocou hlbokého učenia. V porovnaní s cvičeniami z minulého leta, zlepšíme detekciu tváre pomocou ResNet modelu a podobný model využijeme na vytvorenie deskriptoru tváre. Na to nadviažeme jednoduchú metódu prezentácie. Predvedieme aj ovládanie robota hlasom.
V porovnaní s cvičeniami z minulého leta, zlepšíme detekciu tváre pomocou ResNet modelu a podobný model využijeme na vytvorenie deskriptoru tváre. Na to nadviažeme jednoduchú metódu prezentácie. Predvedieme aj ovládanie robota hlasom.
Z prednášky sú dostupné [slajdy] a [videozáznam] na youtube kanáli Robotika.SK.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
5. 12. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (23. prednáška)Juraj Slačka: Micromouse Ako vie robotická myš nájsť cestu bludiskom?
História súťaže IEEE Micromouse - čo je to za súťaž, kedy vznikla, aké
má pravidlá. Algoritmy pre hľadanie cesty bludiskom, zaujímavé konštrukcie
robotov pre bludisko. Súčasné svetové trendy v tejto kategórií.
Ako vie robotická myš nájsť cestu bludiskom?
História súťaže IEEE Micromouse - čo je to za súťaž, kedy vznikla, aké
má pravidlá. Algoritmy pre hľadanie cesty bludiskom, zaujímavé konštrukcie
robotov pre bludisko. Súčasné svetové trendy v tejto kategórií.
Z prednášky sú dostupné [slajdy I.] [slajdy II.] [simulátor] a [videozáznam] na youtube kanáli Robotika.SK.
 Juraj Slačka vyštudoval na FEI STU odbor kybernetika. Okrem robotiky sa zaujíma o vesmírne
aktivity. Okrem iného je jedným zo spolutvorcov prvého Slovenského satelitu SkCube, konkrétne
jeho riadiaceho systému. Zaoberá
sa aj riadením nelineárnych systémov a výpočtami na grafických procesoroch. Je aktívny člen
volejbalového tímu. Za prácu na družici SkCube získal v r. 2015 od ministra školstva Pamätný
list sv. Gorazda. V súčasnej dobe pôsobí ako odborný asistent na Ústave robotiky a kybernetiky
FEI STU.
Juraj Slačka vyštudoval na FEI STU odbor kybernetika. Okrem robotiky sa zaujíma o vesmírne
aktivity. Okrem iného je jedným zo spolutvorcov prvého Slovenského satelitu SkCube, konkrétne
jeho riadiaceho systému. Zaoberá
sa aj riadením nelineárnych systémov a výpočtami na grafických procesoroch. Je aktívny člen
volejbalového tímu. Za prácu na družici SkCube získal v r. 2015 od ministra školstva Pamätný
list sv. Gorazda. V súčasnej dobe pôsobí ako odborný asistent na Ústave robotiky a kybernetiky
FEI STU.
7. 11. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (23. prednáška)Štefan Beňuš: Rečové prispôsobovanie sa medzi človekom a robotom Je možné, že ak sa reč robota/avatara prispôsobuje reči svojho užívateľa, tak to ovplyvňuje dôveryhodnosť robota/avatara v očiach užívateľa a následne aj jeho/jej rozhodovanie? Pri hľadaní odpovedí na túto otázku sme vyskúšali niekoľko implementácií rečovej interakcie medzi robotom/avatarom a človekom, ktoré v prednáške prediskutujeme. Na záver sme predstavili robotickú hlavu Furhat a podelím sa o počiatočné skúsenosti pri vyvíjaní interaktívnej komunikácie s ňou.
Videozáznam je na youtube kanáli Robotika.SK.
Je možné, že ak sa reč robota/avatara prispôsobuje reči svojho užívateľa, tak to ovplyvňuje dôveryhodnosť robota/avatara v očiach užívateľa a následne aj jeho/jej rozhodovanie? Pri hľadaní odpovedí na túto otázku sme vyskúšali niekoľko implementácií rečovej interakcie medzi robotom/avatarom a človekom, ktoré v prednáške prediskutujeme. Na záver sme predstavili robotickú hlavu Furhat a podelím sa o počiatočné skúsenosti pri vyvíjaní interaktívnej komunikácie s ňou.
Videozáznam je na youtube kanáli Robotika.SK.
 Štefan Beňuš získal doktorát z lingvistiky na New York University a absolvoval post-doc v oddelení spracovania reči na Columbia University. V súčasnosti pôsobí na Univerzite Konštantína Filozofa v Nitre a na UI SAV. Venuje sa hlavne vzťahu medzi foneticko-prozodickými vlastnosťami reči a ich funkciami v kognitívnom komunikačnom systéme.
Štefan Beňuš získal doktorát z lingvistiky na New York University a absolvoval post-doc v oddelení spracovania reči na Columbia University. V súčasnosti pôsobí na Univerzite Konštantína Filozofa v Nitre a na UI SAV. Venuje sa hlavne vzťahu medzi foneticko-prozodickými vlastnosťami reči a ich funkciami v kognitívnom komunikačnom systéme.
3. 10. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (22. prednáška)Brian Innes: IBM Watson and IoT This workshop will show you how to create an IoT application using an ESP8266 device with a temperature and
humidity sensor and a programmable, coloured LED. You will use the Arduino IDE to create the device application
which will securely send the sensor data to the IBM Cloud. The workshop will show how to create and use SSL
certificates to secure the communication between the device and IBM Cloud. You do not need to have any
previous IoT or device programming knowledge to participate in the workshop, but you should have some
programming experience.
This workshop will show you how to create an IoT application using an ESP8266 device with a temperature and
humidity sensor and a programmable, coloured LED. You will use the Arduino IDE to create the device application
which will securely send the sensor data to the IBM Cloud. The workshop will show how to create and use SSL
certificates to secure the communication between the device and IBM Cloud. You do not need to have any
previous IoT or device programming knowledge to participate in the workshop, but you should have some
programming experience.
Requirements:
It is important to have the attendees complete the software installs before the workshop, as a lot of time can be wasted getting the software downloaded and installed. Each participant will need to setup the software (steps 1 to 5). The workshop can be run on Windows, Mac or Linux operating systems. See the required prerequisites here: https://github.com/binnes/esp8266Workshop/blob/master/en/part1/PREREQ.md Hardware mentioned in the text will be provided by us.
 Brian Innes is currently a developer advocate for Watson Internet of
Things in IBM. Brian received his BSc degree from the University of
Newcastle upon Tyne. He has since worked in the IT industry for over
20 years, with a focus on edge of network devices such as mobile,
RFID and Internet of Things. Working at IBM as a Technical Specialist
advising developers how to adopt Cloud - Platform as a Service.
How to create good cloud applications whilst being agile and
responsive to customer needs and the changing needs of business.
Combining best practices of agile methodology, DevOps processes and
tooling and application architecture to deliver applications
5. 9. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (21. prednáška)František Duchoň: Súčasná priemyselná robotika a jej budúcnosť
Brian Innes is currently a developer advocate for Watson Internet of
Things in IBM. Brian received his BSc degree from the University of
Newcastle upon Tyne. He has since worked in the IT industry for over
20 years, with a focus on edge of network devices such as mobile,
RFID and Internet of Things. Working at IBM as a Technical Specialist
advising developers how to adopt Cloud - Platform as a Service.
How to create good cloud applications whilst being agile and
responsive to customer needs and the changing needs of business.
Combining best practices of agile methodology, DevOps processes and
tooling and application architecture to deliver applications
5. 9. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (21. prednáška)František Duchoň: Súčasná priemyselná robotika a jej budúcnosť Prednáška je zameraná na predstavenie aplikácií, ktoré súčasná robotika zvláda.
Ďalej budú predstavené výzvy priemyselnej robotiky, jej postavenie v rámci
konceptu Industry 4.0. Záver prednášky sa zaoberá kolaboratívnymi aplikáciami
priemyselných robotov a vízie ďalších inovácií v priemyselnej robotike.
Videozáznam je na youtube kanáli Robotika.SK.
Prednáška je zameraná na predstavenie aplikácií, ktoré súčasná robotika zvláda.
Ďalej budú predstavené výzvy priemyselnej robotiky, jej postavenie v rámci
konceptu Industry 4.0. Záver prednášky sa zaoberá kolaboratívnymi aplikáciami
priemyselných robotov a vízie ďalších inovácií v priemyselnej robotike.
Videozáznam je na youtube kanáli Robotika.SK.
František Duchoň v súčasností pôsobí ako docent na FEI STU. Je garantom predmetov Riadenie
mobilných robotov, Výrobné systémy a Technické prostriedky riadenia. V súčasnosti je autorom alebo
spoluautorom vyše 150 publikácií o robotike a príbuzných témach. Je autorom aj 3 vysokoškolských
učebníc a jednej monografie. Je spoluzakladateľom a v súčasnosti predsedom Národného centra robotiky.
1. 8. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (8. cvičenie)Andrej Lúčny: Ako naučiť robota rozpoznávať kto je kto pomocou knižnice dlib. Dlib je knižnica, ktorá implementuje viacero metód počítačového videnia a strojového učenia. Použijeme
z nej detektor tvárí a metódu strojového učenia LDA nad BLP z obrázkov tvárí. Robot sa naučí rozlišovať
kto je kto podľa toho, ako sa kto predstaví. Cvičenie je určené tým, ktorí s témou nemajú žiadne skúsenosti
a chcú nejaké získať. Mali by ale aspoň trochu ovládať jazyk C++. Je potrebné si doniesť vlastný notebook
s MS Windows alebo Linux Ubuntu ako aj usb web kameru alebo mobilný telefón s aplikáciou DroidCam (čo bude
na túto aplikáciu dokonca vhodnejšie). Cvičenie nadväzuje na 7. cvičenie, zdrojové kódy
pre windows a
pre linux
sú len doplnkom k tomuto cvičeniu.
Z cvičenia sú dostupné slajdy.
Dlib je knižnica, ktorá implementuje viacero metód počítačového videnia a strojového učenia. Použijeme
z nej detektor tvárí a metódu strojového učenia LDA nad BLP z obrázkov tvárí. Robot sa naučí rozlišovať
kto je kto podľa toho, ako sa kto predstaví. Cvičenie je určené tým, ktorí s témou nemajú žiadne skúsenosti
a chcú nejaké získať. Mali by ale aspoň trochu ovládať jazyk C++. Je potrebné si doniesť vlastný notebook
s MS Windows alebo Linux Ubuntu ako aj usb web kameru alebo mobilný telefón s aplikáciou DroidCam (čo bude
na túto aplikáciu dokonca vhodnejšie). Cvičenie nadväzuje na 7. cvičenie, zdrojové kódy
pre windows a
pre linux
sú len doplnkom k tomuto cvičeniu.
Z cvičenia sú dostupné slajdy.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
4. 7. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (7. cvičenie)Andrej Lúčny: Ako naučiť robota vidieť ľudskú tvár pomocou knižnice dlib. Dlib je knižnica, ktorá implementuje viacero metód počítačového videnia a strojového učenia.
Použijeme z nej detektor tvárí a detektor čŕt tváre na základe čoho bude simulovaný robot
napodobňovať pohyby hlavy človeka. Cvičenie je určené tým, ktorí s témou nemajú žiadne
skúsenosti a chcú nejaké získať. Mali by ale aspoň trochu ovládať jazyk C++. Je potrebné
si doniesť vlastný notebook s MS Windows alebo Linux Ubuntu ako aj usb web kameru alebo
mobilný telefón s aplikáciou DroidCam. Inštrukcie ako si predinštalovať počítač pre
MS Windows a pre
Linux Ubuntu.
Videozáznam je na youtube kanáli Robotika.SK.
Z cvičenia sú dostupné slajdy,
inštalačný balík pre windows
a zdrojové kódy s datasetmi pre windows
a zdrojové kódy s datasetmi pre linux.
Dlib je knižnica, ktorá implementuje viacero metód počítačového videnia a strojového učenia.
Použijeme z nej detektor tvárí a detektor čŕt tváre na základe čoho bude simulovaný robot
napodobňovať pohyby hlavy človeka. Cvičenie je určené tým, ktorí s témou nemajú žiadne
skúsenosti a chcú nejaké získať. Mali by ale aspoň trochu ovládať jazyk C++. Je potrebné
si doniesť vlastný notebook s MS Windows alebo Linux Ubuntu ako aj usb web kameru alebo
mobilný telefón s aplikáciou DroidCam. Inštrukcie ako si predinštalovať počítač pre
MS Windows a pre
Linux Ubuntu.
Videozáznam je na youtube kanáli Robotika.SK.
Z cvičenia sú dostupné slajdy,
inštalačný balík pre windows
a zdrojové kódy s datasetmi pre windows
a zdrojové kódy s datasetmi pre linux.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
6. 6. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (20. prednáška)Marián Kľúčik: Robot na simulovanú marťanskú misiu Možno ste zaregistrovali, že na simulovanú marťanskú misiu pôjde s prvou slovenskou marsonautkou
Michaelou Musilovou aj robot - rover, ktorého vyvinuli vo firme RoboTech Vision. Misia sa tentoraz
uskutoční na Havaji na sopke Mauna Loa a je vedená NASA. Má preveriť psychickú odolnosť posádky.
Robot rover vyvinutý na Slovensku bude pomáhať s geologickým výskumom.
Možno ste zaregistrovali, že na simulovanú marťanskú misiu pôjde s prvou slovenskou marsonautkou
Michaelou Musilovou aj robot - rover, ktorého vyvinuli vo firme RoboTech Vision. Misia sa tentoraz
uskutoční na Havaji na sopke Mauna Loa a je vedená NASA. Má preveriť psychickú odolnosť posádky.
Robot rover vyvinutý na Slovensku bude pomáhať s geologickým výskumom.
Ako taký robot funguje, čo má vo výbave, čím je špeciálny a aké úlohy bude plniť nám prídu porozprávať jeho konštruktéri. A ak bude misia pokračovať podľa plánu, tak zrejme už budeme mať aj prvé data. Videozáznam oboch prednášok je na youtube kanáli Robotika.SK.
 Marián Kľúčik vyštudoval odbor automatizácia so špecializáciou robotika na FEI STU Bratislava.
V súčasnosti pôsobí ako doktorand na Ústave robotiky a kybernetiky FEI STU v Bratislave a vo firme RoboTech
Vision. V rámci dizertačnej práce sa venuje vytváraniu nových modulov pre Robotický operačný systém,
napríklad modulov na vzdialené i autonómne ovládanie pohybu mobilného
robota MRVK-01.
Marián Kľúčik vyštudoval odbor automatizácia so špecializáciou robotika na FEI STU Bratislava.
V súčasnosti pôsobí ako doktorand na Ústave robotiky a kybernetiky FEI STU v Bratislave a vo firme RoboTech
Vision. V rámci dizertačnej práce sa venuje vytváraniu nových modulov pre Robotický operačný systém,
napríklad modulov na vzdialené i autonómne ovládanie pohybu mobilného
robota MRVK-01.
2. 5. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (19. prednáška)Michal Hodoň: OpenHW platformy pre výuku Prednáška popisuje skúsenosti s tvorbou výukového hardvéru na Žilinskej univerzite ako aj genézu stavebníc
Yrobot - Myrobot - IoTRobot
a ich použitia a adaptácie na nové oblasti výučby.
Prednáška popisuje skúsenosti s tvorbou výukového hardvéru na Žilinskej univerzite ako aj genézu stavebníc
Yrobot - Myrobot - IoTRobot
a ich použitia a adaptácie na nové oblasti výučby.
Z prednášky sú dostupné slajdy.
Michal Chovanec: Význam predtrénovania neurónovej siete bez učiteľa pre učenie odmenou a trestom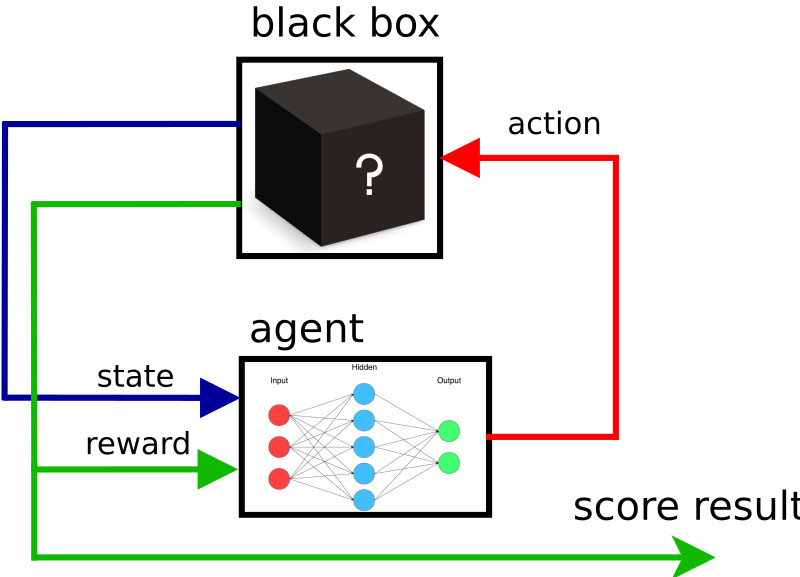 Prednáška prezentuje príklad s virtuálnymi botmi učiacimi sa odmenou a trestom pomocou algoritmu Sarsa
(State–action–reward–state–action), čo je pokročilejšia verzia tzv. Q-learningu, pri ktorom hrá úlohu
aproximátora funkcie ohodnotení Q(s,a) neurónová sieť. Uvádza ako je možné túto sieť
na úvod predtrénovať bez určiteľa stanovujúceho odmenu či trest a demonštruje význam takéhoto predtrénovania.
Prednáška prezentuje príklad s virtuálnymi botmi učiacimi sa odmenou a trestom pomocou algoritmu Sarsa
(State–action–reward–state–action), čo je pokročilejšia verzia tzv. Q-learningu, pri ktorom hrá úlohu
aproximátora funkcie ohodnotení Q(s,a) neurónová sieť. Uvádza ako je možné túto sieť
na úvod predtrénovať bez určiteľa stanovujúceho odmenu či trest a demonštruje význam takéhoto predtrénovania.
Z prednášky sú dostupné slajdy a videoukážka trénovania.
Videozáznam oboch prednášok je na youtube kanáli Robotika.SK.
 Michal Hodoň pracuje ako odborný asistent na Katedre technickej kybernetiky, Fakulte riadenia a
informatiky, Žilinskej univerzity v Žiline. Medzi jeho hlavné oblasti záujmu patrí vývoj vstavaných
systémov pre účely výučby i pre prax (bezdrôtové siete senzorov).
Michal Hodoň pracuje ako odborný asistent na Katedre technickej kybernetiky, Fakulte riadenia a
informatiky, Žilinskej univerzity v Žiline. Medzi jeho hlavné oblasti záujmu patrí vývoj vstavaných
systémov pre účely výučby i pre prax (bezdrôtové siete senzorov).
 Michal Chovanec pracuje ako výskumní na Fakulte riadenia a
informatiky, Žilinskej univerzity v Žiline. Medzi jeho hlavné oblasti záujmu patrí umelá inteligencia
a strojové učenie. Pôsobil taktiež v Ceit group Žilina, kde sa venoval robotike.
Michal Chovanec pracuje ako výskumní na Fakulte riadenia a
informatiky, Žilinskej univerzity v Žiline. Medzi jeho hlavné oblasti záujmu patrí umelá inteligencia
a strojové učenie. Pôsobil taktiež v Ceit group Žilina, kde sa venoval robotike.
4. 4. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava.
18. prednáškaTomáš Krajník: WhyCon: A precise, efficient and low-cost localization system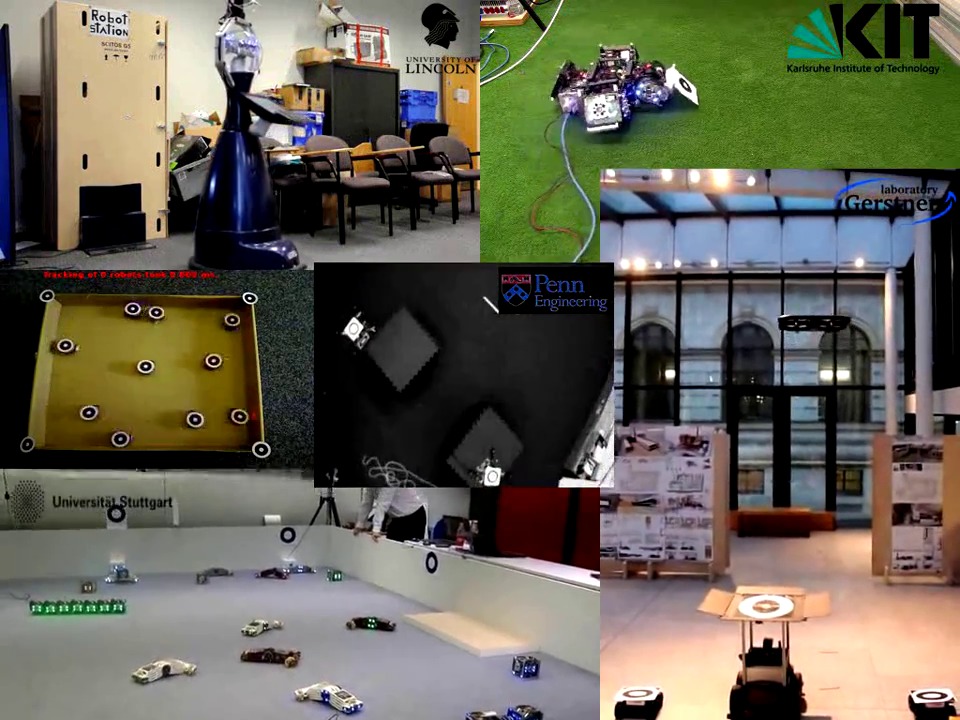 Presná a spoľahlivá lokalizácia je jedným z kľučových problémov mobilnej
robotiky. Obvykle sa tento problém rieši metódami simultánnej lokalizácie
a mapovania (SLAM). Napriek tomu sa však často používaú aj externé lokalizačné
systémy, či už pre riadenie v uzavretej slučke, alebo pre meranie polohy.
V prednáške predvádzame rýchly a presný vizuálny softvér pre lokalizáciu
viacerých robotov. Jadrom je nový a efektívny algorimtus pre rozpoznávanie
čierno-bielych vzorov. Metóda je robustná a odolná voči zmenám osvetlenia,
má presnosť na úrovni pixlov a jej výpočtová zložitosť nezáleži od veľkosti
spracovaného obrazu. Je dostatočne rýchla a zvláda spracovať stovky snímkov
za sekundu pomocou bežného počítača a lacnej kamery, pričom dosahuje milimetrovú
presnosť.
Presná a spoľahlivá lokalizácia je jedným z kľučových problémov mobilnej
robotiky. Obvykle sa tento problém rieši metódami simultánnej lokalizácie
a mapovania (SLAM). Napriek tomu sa však často používaú aj externé lokalizačné
systémy, či už pre riadenie v uzavretej slučke, alebo pre meranie polohy.
V prednáške predvádzame rýchly a presný vizuálny softvér pre lokalizáciu
viacerých robotov. Jadrom je nový a efektívny algorimtus pre rozpoznávanie
čierno-bielych vzorov. Metóda je robustná a odolná voči zmenám osvetlenia,
má presnosť na úrovni pixlov a jej výpočtová zložitosť nezáleži od veľkosti
spracovaného obrazu. Je dostatočne rýchla a zvláda spracovať stovky snímkov
za sekundu pomocou bežného počítača a lacnej kamery, pričom dosahuje milimetrovú
presnosť.
Tentoraz to bola hands-on prednáška: kto si doniesol svoj vlastný počítač, tak z nej odišiel s fungujúcim systémom na lokalizáciu.
whycon na github.com
videozáznam prednášky
prezentácia z prednášky video 1 video 2 video 3 video 4
Hlavnou oblasťou záujmu Tomáša Krajníka (ČVUT Praha) je mobilná robotika
a to najmä ich navigácia v premenlivom prostredí. Je autorom robustného
vizuálneho nabigačného algoritmu pre autonómne pozemné a lietajúce stroje
v exteriéri nezávislý od zmien počas ročných období. Je aj autorom modelu
neurčitosti stavu prostredia pomocou frekvenčných spektier, ktorý zlepšuje
dhodobú autonómnosť robota pohybyjúceho sa v premenlivom prostredí.
Jeho algoritmy boli implementované v knižniciach pre vizuálne sledovanie
a používajú ich aj v NASA, EPFL, KIT, AIT atď. Tomáš význame prispel aj
k úspechu tímu účastniaceho sa na súťaži Mohammed bin Zayeed Robotics
Challenge. Spolupracuje s niekoľkými výskumnými inštitúciami po celom svete,
svoje výsledky prezentoval okrem iného aj na MIT, UPENN a na Oxforde.
7. 3. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava.
17. prednáškaJan Najvárek: Roboauto - kdy se svezeme v samořidicím autě? Dozvíte se, kam Roboauto tým za posledních 10 let došel a co plánuje v
nejbližší budoucnosti. Projdeme si historii od malých vozítek, které
soutěžila i vítězila v soutěži Robotour, až po full-size vozidlo Hyundai
i30 předělané na autonomní řízení. Ukážeme si simulaci řízení v GTA, kde
ladíme naše algoritmy. Probereme poslední vývoj self-drivingu ve světě.
Prodiskutujeme, co všechno se kolem nás změní, až budeme jezdit v
samořidicích vozech. videozáznam
Dozvíte se, kam Roboauto tým za posledních 10 let došel a co plánuje v
nejbližší budoucnosti. Projdeme si historii od malých vozítek, které
soutěžila i vítězila v soutěži Robotour, až po full-size vozidlo Hyundai
i30 předělané na autonomní řízení. Ukážeme si simulaci řízení v GTA, kde
ladíme naše algoritmy. Probereme poslední vývoj self-drivingu ve světě.
Prodiskutujeme, co všechno se kolem nás změní, až budeme jezdit v
samořidicích vozech. videozáznam
 Jan Najvárek vystudoval VUT Brno, kde získal doktorát z neuronových sítí. Spoluzakladatel společnosti ARTIN, která vyvíjí software pro větší společnosti v oblasti telco, bankingu, insurance i automotive. Věnuje se problematice samo-řidicích vozidel od doby, kdy v soutěži DARPA Grand Challenge 2005 vozidlo Stanley dojelo pro vítězství a u nás se nic nedělo, a tak se rozhodl to s kolegou Tomášem Ondráčkem změnit…
Jan Najvárek vystudoval VUT Brno, kde získal doktorát z neuronových sítí. Spoluzakladatel společnosti ARTIN, která vyvíjí software pro větší společnosti v oblasti telco, bankingu, insurance i automotive. Věnuje se problematice samo-řidicích vozidel od doby, kdy v soutěži DARPA Grand Challenge 2005 vozidlo Stanley dojelo pro vítězství a u nás se nic nedělo, a tak se rozhodl to s kolegou Tomášem Ondráčkem změnit…
7. 2. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (1. výstava)Richard Balogh: Retrorobotika Toto stretnutie bolo trocha netradičné. Tentoraz sa na mieste prednášajúceho
ocitol ktokoľvek, kto prinesol ukázať ako začínal s robotikou,
čo boli jeho prvé kontakty s touto oblasťou a o každej ukážke povedal ostatným
aj zopár slov. Zaspomínali sme, ako sme robili svoje prvé pokusy v časoch, ktoré
dnes považujeme za zašlé a prekonané, ale aj za pionierske a vzrušujúce.
Nechýbali: časopis abc so seriálom Vzpoura mozků, počítač PMD-85, Logiktronik, diaľnopis
či stavebnica Adam CMOS.
videozáznam
Toto stretnutie bolo trocha netradičné. Tentoraz sa na mieste prednášajúceho
ocitol ktokoľvek, kto prinesol ukázať ako začínal s robotikou,
čo boli jeho prvé kontakty s touto oblasťou a o každej ukážke povedal ostatným
aj zopár slov. Zaspomínali sme, ako sme robili svoje prvé pokusy v časoch, ktoré
dnes považujeme za zašlé a prekonané, ale aj za pionierske a vzrušujúce.
Nechýbali: časopis abc so seriálom Vzpoura mozků, počítač PMD-85, Logiktronik, diaľnopis
či stavebnica Adam CMOS.
videozáznam
Richard Balogh pochádza z Bratislavy a pôsobí na Ústave automobilovej mechatroniky na Fakulte elektrotechniky a informatiky na STU v Bratislave. Študoval na Elektrotechnickej fakulte, kde na Ústave robotiky a kybernetiky získal PhD. Je zakladateľom občianskeho združenia Robotika.SK a hlavným organizátorom súťaže mobilných robotov ISTROBOT. Je spoluzakladateľom konferencie Robotics in Education.
10. 1. 2018, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (6. cvičenie)Andrej Lúčny: Hlboké učenie s Keras a OpenCV3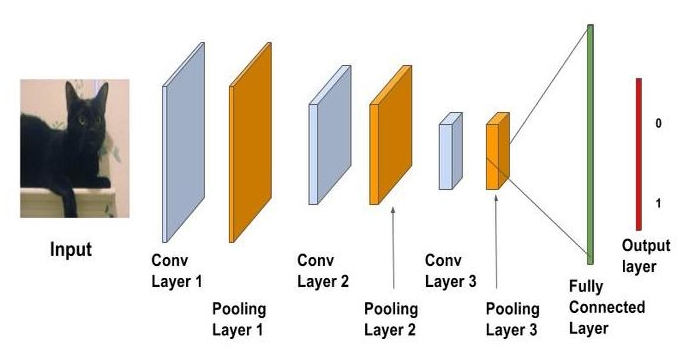 OpenCV je populárna knižnica pre počítačové videnie, implementovaná v C++ a Phyton. Keras je jednou z implementácii
tzv. hlbokého učenia (Deep Learning), ktoré v ostatných rokoch prinieslo značný progres v rozpoznávaní a klasifikácii
obrazu. Cvičenie je určené tým, ktorí s témou nemajú žiadne skúseností a chcú nejaké získať. Mali by ale aspoň torchu
ovládať jazyky C++ a Phyton. Mali by taktiež disponovať vhodným hardwarom: notebookom alebo towerom s grafickou kartou NVIDIA
podporujúcou výpočty na GPU (CUDA). Návod pre inštaláciu na MS Windows, ktorý nie je štandardnou platformou pre Keras,
je tu. Návody pre Linux Ubuntu je tu tu.
Príklady z cvičenia sú k dispozícii tu,
vzorové výstupy tu. Dostupná je taktiež
prezentácia a videozáznam.
OpenCV je populárna knižnica pre počítačové videnie, implementovaná v C++ a Phyton. Keras je jednou z implementácii
tzv. hlbokého učenia (Deep Learning), ktoré v ostatných rokoch prinieslo značný progres v rozpoznávaní a klasifikácii
obrazu. Cvičenie je určené tým, ktorí s témou nemajú žiadne skúseností a chcú nejaké získať. Mali by ale aspoň torchu
ovládať jazyky C++ a Phyton. Mali by taktiež disponovať vhodným hardwarom: notebookom alebo towerom s grafickou kartou NVIDIA
podporujúcou výpočty na GPU (CUDA). Návod pre inštaláciu na MS Windows, ktorý nie je štandardnou platformou pre Keras,
je tu. Návody pre Linux Ubuntu je tu tu.
Príklady z cvičenia sú k dispozícii tu,
vzorové výstupy tu. Dostupná je taktiež
prezentácia a videozáznam.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
6. 12. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (16. prednáška)Ivana Budinská: Heterogénny robotický swarm
 Swarm robotika patrí k relatívne mladým odvetviam robotiky. Jej podstatou je
uplatňovanie decentralizovaného spôsobu riadenia skupiny robotov, pri ktorom
sa využívajú paralely s prírodnymi swarmovými systémami, napr. skupinami
sociálneho hmyzu, kŕdle vtákov, roje včiel a pod. Dôležitou vlastnosťou
týchto systémov je tzv. emergentné správanie. Ide o komplexné správanie
skupiny ako celku, ktoré sa u jednotlivcov tvoriacich danú skupinu
nevyskytuje. Heterogénny robotický swarm je tvorený množstvom jednoduchých
robotických systémov, ktoré majú rôzne vlastnosti. Cieľom výskumu v oblasti
heterogénnych robotických swarmov je posilniť základné vlastnosti
robotického swarmu (robustnosť, flexibilita, adaptivita, škálovateľnosť
a distribuovanosť) pre operácie v rôznorodých prostrediach.
Swarm robotika patrí k relatívne mladým odvetviam robotiky. Jej podstatou je
uplatňovanie decentralizovaného spôsobu riadenia skupiny robotov, pri ktorom
sa využívajú paralely s prírodnymi swarmovými systémami, napr. skupinami
sociálneho hmyzu, kŕdle vtákov, roje včiel a pod. Dôležitou vlastnosťou
týchto systémov je tzv. emergentné správanie. Ide o komplexné správanie
skupiny ako celku, ktoré sa u jednotlivcov tvoriacich danú skupinu
nevyskytuje. Heterogénny robotický swarm je tvorený množstvom jednoduchých
robotických systémov, ktoré majú rôzne vlastnosti. Cieľom výskumu v oblasti
heterogénnych robotických swarmov je posilniť základné vlastnosti
robotického swarmu (robustnosť, flexibilita, adaptivita, škálovateľnosť
a distribuovanosť) pre operácie v rôznorodých prostrediach.
videozáznam prednášky
 Ing. Ivana Budinská, PhD. je absolventkou STU v odbore Biokybernetika. PhD
v odbore Automatizácia získala na Ústave teórie riadenia a robotiky SAV.
Je vedúcou oddelenia Modelovania a simulácie diskrétnych procesov na Ústave
informatiky SAV. Ako externý pedagóg pôsobí na STU v Bratislave. Medzi jej
vedecké záujmy patrí modelovanie a simulácia diskrétnych systémov,
multi-agentové systémy, umelá inteligencia, komplexné systémy a teória
systémov. V súčasnosti sa zameriava na aplikácie prírodou inšpirovaných
algoritmov v rôznych doménach, napr. optimalizácia výrobných procesov,
logistických procesov, riadenie skupiny mobilných robotov, swarm robotika.
Je autorkou a spoluautorkou viac ako 100 publikácií s viac ako 120 citáciami.
8. 11. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (15. prednáška)David Obdržálek: Konečné automaty a jejich použití v praktické robotice
Ing. Ivana Budinská, PhD. je absolventkou STU v odbore Biokybernetika. PhD
v odbore Automatizácia získala na Ústave teórie riadenia a robotiky SAV.
Je vedúcou oddelenia Modelovania a simulácie diskrétnych procesov na Ústave
informatiky SAV. Ako externý pedagóg pôsobí na STU v Bratislave. Medzi jej
vedecké záujmy patrí modelovanie a simulácia diskrétnych systémov,
multi-agentové systémy, umelá inteligencia, komplexné systémy a teória
systémov. V súčasnosti sa zameriava na aplikácie prírodou inšpirovaných
algoritmov v rôznych doménach, napr. optimalizácia výrobných procesov,
logistických procesov, riadenie skupiny mobilných robotov, swarm robotika.
Je autorkou a spoluautorkou viac ako 100 publikácií s viac ako 120 citáciami.
8. 11. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (15. prednáška)David Obdržálek: Konečné automaty a jejich použití v praktické robotice
 Pro implementaci řízení jednoduchých robotů se často používá postupně budovaný
systém, který je zpočátku jednoduchý a jasný, ale protože plně nepokrývá požadovanou
funkčnost, je postupně vylepšován a bobtná, až se stane komplikovaným, zamotaným a
neudržovatelným. Na semináři sme ukázali, jak lze vytvořit schopný a zároveň
přehledný i udržovatelný systém pomocí konečného automatu. Kromě teorie sme také
předvedli a vysvětlili systém robota, který letos v soutěži "V sklade kečupu" obsadil
2. místo, přičemž jeho jádrem je právě konečný automat.
Pro implementaci řízení jednoduchých robotů se často používá postupně budovaný
systém, který je zpočátku jednoduchý a jasný, ale protože plně nepokrývá požadovanou
funkčnost, je postupně vylepšován a bobtná, až se stane komplikovaným, zamotaným a
neudržovatelným. Na semináři sme ukázali, jak lze vytvořit schopný a zároveň
přehledný i udržovatelný systém pomocí konečného automatu. Kromě teorie sme také
předvedli a vysvětlili systém robota, který letos v soutěži "V sklade kečupu" obsadil
2. místo, přičemž jeho jádrem je právě konečný automat.
Z prednášky sú dostupné slajdy a videozáznam prednášky
 David Obdržálek vystudoval informatiku na Matematicko-fyzikální fakultě UK v Praze.
Řadu let přednáší na MFF UK informatické předměty; postupně se jeho hlavní oblastí
zájmu stala robotika, které se dnes věnuje plně. Kromě výuky na MFF UK organizuje
různé robotické akce, z nichž největší je "Robotický den" - soutěže pro veškeré
zájemce o stavbu a/nebo programování robotů.
David Obdržálek vystudoval informatiku na Matematicko-fyzikální fakultě UK v Praze.
Řadu let přednáší na MFF UK informatické předměty; postupně se jeho hlavní oblastí
zájmu stala robotika, které se dnes věnuje plně. Kromě výuky na MFF UK organizuje
různé robotické akce, z nichž největší je "Robotický den" - soutěže pro veškeré
zájemce o stavbu a/nebo programování robotů.
4. 10. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (14. prednáška)Lukáš Pariža: Viacúčelový robot pre Istrobot a podobné súťaže
 Seminár bude venovaný podrobnému predstaveniu súťažného robota Nite 4, ktorý je určený pre sledovanie čiary, bludisko a
podobné kategórie. Bude ukázané, na čo bol braný ohľad pri návrhu robota, ako sa postupovalo pri jeho vyhotovovaní,
ako bolo navrhnuté riadenie, ako fungujú jednotlivé senzorické systémy, algoritmy a viac.
Seminár bude venovaný podrobnému predstaveniu súťažného robota Nite 4, ktorý je určený pre sledovanie čiary, bludisko a
podobné kategórie. Bude ukázané, na čo bol braný ohľad pri návrhu robota, ako sa postupovalo pri jeho vyhotovovaní,
ako bolo navrhnuté riadenie, ako fungujú jednotlivé senzorické systémy, algoritmy a viac.
videozáznam prednášky
 Lukáš Pariža v súčasnosti pracuje v pražskej pobočke firmy Valeo, ktorá sa zaoberá vývojom systémov
pre inteligentné a autonómne automobily. Tam sa venuje vývoju SW a 3D grafike pre oblasť simulácií.
Vyštudoval odbor Robotika na FEI STU v Bratislave a robotickým súťažiam sa venuje už od základnej školy.
Lukáš Pariža v súčasnosti pracuje v pražskej pobočke firmy Valeo, ktorá sa zaoberá vývojom systémov
pre inteligentné a autonómne automobily. Tam sa venuje vývoju SW a 3D grafike pre oblasť simulácií.
Vyštudoval odbor Robotika na FEI STU v Bratislave a robotickým súťažiam sa venuje už od základnej školy.
6. 9. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (13. prednáška)Pavel Petrovič: Pravdepodobnostná lokalizácia robota
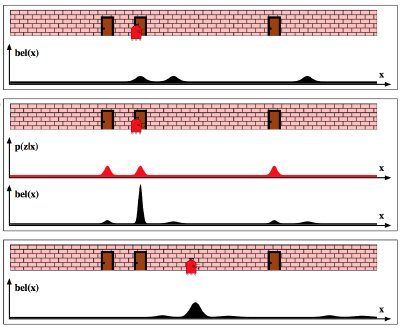 Seminár bol zameraný na prehľad metód využívajúcich pravdepodobnostné reprezentácie, ktoré môžu byť
užitočné v robotike aj s nejakými praktickými ukážkami na robotoch, ktoré sme si zostrojili na Katedre aplikovanej informatiky.
Pravdepodobnostné reprezentácie sa dajú využiť napríklad na lokalizáciu robota umiestneného v známom prostredí na neznámom mieste
pomocou pravdepodobnostných výpočtov nad vstupmi z jeho senzorov. Videoprezentácia zo seminára je
tu. Užitočné linky:
1
2
3
4
Seminár bol zameraný na prehľad metód využívajúcich pravdepodobnostné reprezentácie, ktoré môžu byť
užitočné v robotike aj s nejakými praktickými ukážkami na robotoch, ktoré sme si zostrojili na Katedre aplikovanej informatiky.
Pravdepodobnostné reprezentácie sa dajú využiť napríklad na lokalizáciu robota umiestneného v známom prostredí na neznámom mieste
pomocou pravdepodobnostných výpočtov nad vstupmi z jeho senzorov. Videoprezentácia zo seminára je
tu. Užitočné linky:
1
2
3
4
Pavel Petrovič je odborný asistent na Katedre aplikovanej informatiky FMFI UK v Bratislave,
kde viedol viacero záverečných prác a výučbových predmetov z oblasti robotiky, často sa venuje
popularizačným aktivitám a súťažiam.
2. 8. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (5. cvičenie)Andrej Lúčny: Počítačové videnie s OpenCV3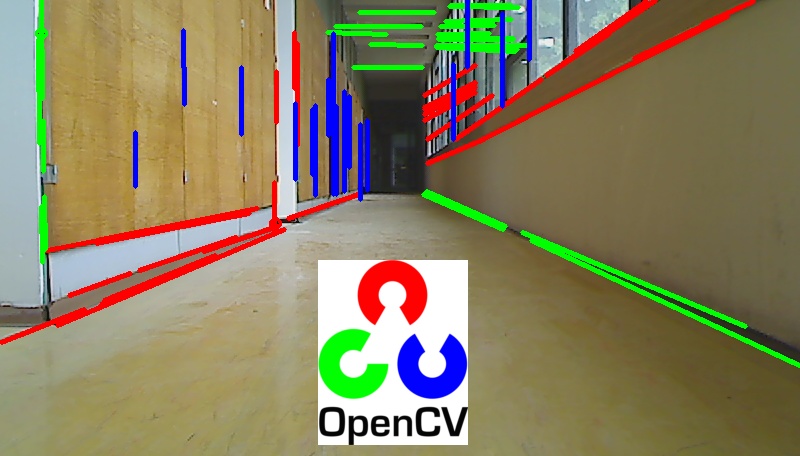 OpenCV je populárna knižnica pre hrátky s obrazom, implementovaná v C++. Cvičenie je určené tým, ktorí
s ňou nemajú veľa skúseností a chcú nejaké získať. Záujemci si môžu zvoliť platformu MS Windows (v takom
prípade treba mať aspoň Visual Studio 2010 Express s C++
(dá sa získať za registráciu, t.j. zdarma, komu chybajú knižnice vcomp
môže si ich doplniť do c:\Program Files(x86)\MicroSoft Visual Studio 10.0\VC\lib) a stiahnuť toto
OpenCV alebo Linux (optimálne Ubuntu Xenial) a stiahnuť si
toto OpenCV rozbalit ho v /opt cez tar -xf opencv32-xenial.tar
a postupovať ďalej podľa README. Príklady z cvičenia sú k dispozícii preMS Windows
a Linux. Dostupná je taktiež
prezentácia z prednášky.
OpenCV je populárna knižnica pre hrátky s obrazom, implementovaná v C++. Cvičenie je určené tým, ktorí
s ňou nemajú veľa skúseností a chcú nejaké získať. Záujemci si môžu zvoliť platformu MS Windows (v takom
prípade treba mať aspoň Visual Studio 2010 Express s C++
(dá sa získať za registráciu, t.j. zdarma, komu chybajú knižnice vcomp
môže si ich doplniť do c:\Program Files(x86)\MicroSoft Visual Studio 10.0\VC\lib) a stiahnuť toto
OpenCV alebo Linux (optimálne Ubuntu Xenial) a stiahnuť si
toto OpenCV rozbalit ho v /opt cez tar -xf opencv32-xenial.tar
a postupovať ďalej podľa README. Príklady z cvičenia sú k dispozícii preMS Windows
a Linux. Dostupná je taktiež
prezentácia z prednášky.
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.
5. 7. 2017, 16:00-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (4. cvičenie)Marián Kľúčik: Robot Operating System Riadenie robota pomocou vývojového prostredia ROS, ktoré vzniklo so zámerom znovupoužiteľnosti open-source riešení.
Záujemcov prosíme o registráciu poslaním e-mailu na info@robotika.sk, odkiaľ obdržia ďalšie pokyny (ako si predinštalovať
počítač). Akcia sa konala v deň štátneho sviatku, takže sme sa rozhodli ju rozšíriť na časovo rozsiahlejší workshop. Od
účastníkov sa očakávalo, že se prinesú počítač s OS Linux Ubuntu, verziu Xenial. Workshop bude mať tri časti:
Riadenie robota pomocou vývojového prostredia ROS, ktoré vzniklo so zámerom znovupoužiteľnosti open-source riešení.
Záujemcov prosíme o registráciu poslaním e-mailu na info@robotika.sk, odkiaľ obdržia ďalšie pokyny (ako si predinštalovať
počítač). Akcia sa konala v deň štátneho sviatku, takže sme sa rozhodli ju rozšíriť na časovo rozsiahlejší workshop. Od
účastníkov sa očakávalo, že se prinesú počítač s OS Linux Ubuntu, verziu Xenial. Workshop bude mať tri časti:
- Úvod do ROSu (prezentácia, čo to je, na čo to slúži, členenie, organizácia práce, a pod.)
- Inštalácia ROSu a pridružených balíkov - práca s vlastným počítačom podľa inštrukcií
- Vytvorenie vlastného balíka ku konkrétnemu robotu (prípadne k simulačnému robotu) - práca s vlastným počítačom podľa inštrukcií, prípadne aj otestovanie na platforme Androver
Marián Kľúčik vyštudoval odbor automatizácia so špecializáciou robotika na FEI STU Bratislava.
V súčasnosti pôsobí ako doktorand na Ústave robotiky a kybernetiky FEI STU v Bratislave a vo firme RoboTech
Vision. V rámci dizertačnej práce sa venuje vytváraniu nových modulov pre Robotický operačný systém,
napríklad modulov na vzdialené i autonómne ovládanie pohybu mobilného robota MRVK-01.
Z workshopu sme síce nerobili záznam, ale môžete si pozrieť screencast, teda záznam práce na počítači jedného z účastníkov. Upozorňujeme, že video je nezostrihané a bez zvuku, veľkosť 610MB: screencast.
28. 6. 2017, 13:00-15:00, CD-150, FEI STU, Ilkovičova 3, Bratislava. (mimoriadna prednáška)Peter Skvarenina: Self-driving Cars: Deep Learning, Computer Vision and Sensor Fusion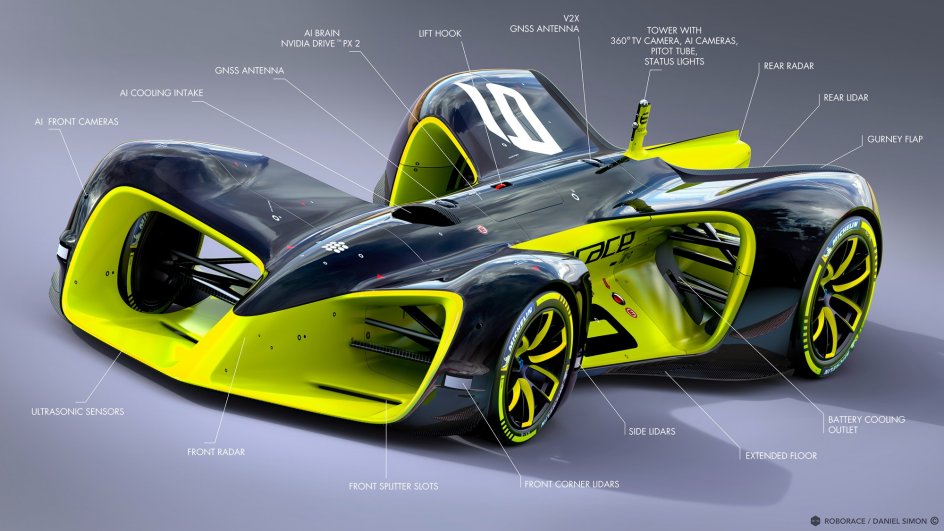 The goal of this presentation is to provide a guide to accessible yet very powerful examples on how to program
own self-driving cars. The presentation is divided into four sections. First section covers an end-to-end
approach to self-driving cars using Deep Learning (Convolutional Neural Networks), based on NVidia's research
as utilized by Roborace race cars, Tesla or Audi. Second section covers the topic of how to program an advanced
lane detection using computer vision and OpenCV. Third section concerns itself with vehicle detection using
computer vision based on Histogram of Oriented Gradients and linear SVM classifier. Fourth and last section
covers sensor fusion of radar and LiDAR data for tracking objects such as pedestrian using Extended Kalman Filters.
The goal of this presentation is to provide a guide to accessible yet very powerful examples on how to program
own self-driving cars. The presentation is divided into four sections. First section covers an end-to-end
approach to self-driving cars using Deep Learning (Convolutional Neural Networks), based on NVidia's research
as utilized by Roborace race cars, Tesla or Audi. Second section covers the topic of how to program an advanced
lane detection using computer vision and OpenCV. Third section concerns itself with vehicle detection using
computer vision based on Histogram of Oriented Gradients and linear SVM classifier. Fourth and last section
covers sensor fusion of radar and LiDAR data for tracking objects such as pedestrian using Extended Kalman Filters.
 Peter Skvarenina graduated from Faculty of Management and Computer Science of University of Zilina and
currently continues his studies at Georgia Institute of Technology in Atlanta in Machine Learning and Robotics,
while living in Frankfurt am Main in Germany. In the past Peter worked for some of the most accomplished
technological companies on various topics, such as on transacted distributed systems with high availability at
SUN Microsystems Inc., at NOKIA on automotive industry's 3D navigation standard, planetary-wide 3D visualization
and Big Data processing, and currently at JetBrains, where he prepared many algorithms (mainly geometric and
computer vision) for Animatron, an online animation editor.
Peter Skvarenina graduated from Faculty of Management and Computer Science of University of Zilina and
currently continues his studies at Georgia Institute of Technology in Atlanta in Machine Learning and Robotics,
while living in Frankfurt am Main in Germany. In the past Peter worked for some of the most accomplished
technological companies on various topics, such as on transacted distributed systems with high availability at
SUN Microsystems Inc., at NOKIA on automotive industry's 3D navigation standard, planetary-wide 3D visualization
and Big Data processing, and currently at JetBrains, where he prepared many algorithms (mainly geometric and
computer vision) for Animatron, an online animation editor.
Slajdy z prednášky nájdete tu: Self-driving_Cars[].pdf
7. 6. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (12. prednáška)Viliam Dillinger: Hierarchické učenie posilňovaním pre hru Starcraft. Pri hre Starcraft bojujú proti sebe hráči budujúci tzv. základne. Stratégiu ich budovania možno chápať ako
pohyb v stavovom priestore, kde stav popisuje základňu vektorom jej parametrov. Prednáška prezentuje ako
zariadiť, aby si počítač vytvoril vlastnú stratégiu hry na základe skúsenosti získanej počas jej hrania
(proti pevne danému algoritmu implementujúceho automatického hráča). Táto stratégia sa postupne vytvára
metódou hierarchického učenia posilňovaním, ktoré umožňuje rekurzívne rozkladať herné zámery na podproblémy.
Dôraz sa pritom kladie na to, aby bolo do procesu učenia vložených učiteľom čo najmenej informácii a aby
bolo možné výslednú stratégiu hry interpretovať ako pochopiteľnú človeku.
Pri hre Starcraft bojujú proti sebe hráči budujúci tzv. základne. Stratégiu ich budovania možno chápať ako
pohyb v stavovom priestore, kde stav popisuje základňu vektorom jej parametrov. Prednáška prezentuje ako
zariadiť, aby si počítač vytvoril vlastnú stratégiu hry na základe skúsenosti získanej počas jej hrania
(proti pevne danému algoritmu implementujúceho automatického hráča). Táto stratégia sa postupne vytvára
metódou hierarchického učenia posilňovaním, ktoré umožňuje rekurzívne rozkladať herné zámery na podproblémy.
Dôraz sa pritom kladie na to, aby bolo do procesu učenia vložených učiteľom čo najmenej informácii a aby
bolo možné výslednú stratégiu hry interpretovať ako pochopiteľnú človeku.
 Viliam Dillinger pochádza z Bratislavy. Je doktorandom na Katedre aplikovanej informatiky na Fakulte
matematiky, fyziky a informatiky Univerzity Komenského v Bratislave. Zaoberá sa neurónovými sieťami,
počítačovým učením, počítačovým videním a umelou inteligenciu pre potreby počítačových hier.
Viliam Dillinger pochádza z Bratislavy. Je doktorandom na Katedre aplikovanej informatiky na Fakulte
matematiky, fyziky a informatiky Univerzity Komenského v Bratislave. Zaoberá sa neurónovými sieťami,
počítačovým učením, počítačovým videním a umelou inteligenciu pre potreby počítačových hier.
3. 5. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (11. prednáška)Lara Lammer: Educational robotics projects Presentation will be in English.
What happens when young people are guided to conceptualize robotic products
for everyday problems or societal issues? Can 21 st century skills like
creativity, critical thinking, collaboration, and communication be developed?
What age brings which challenges to such an approach? Are there other
factors like interests or strengths that need to be considered? We will
discuss two pilot case studies that explore these questions: one with
kindergarten children, the other with high school and university students.
Presentation will be in English.
What happens when young people are guided to conceptualize robotic products
for everyday problems or societal issues? Can 21 st century skills like
creativity, critical thinking, collaboration, and communication be developed?
What age brings which challenges to such an approach? Are there other
factors like interests or strengths that need to be considered? We will
discuss two pilot case studies that explore these questions: one with
kindergarten children, the other with high school and university students.
videozáznam prednášky Lara Lammer is a critical thinker who generates divers ideas and solutions
to address challenges of the 21st century, and conceptualizes them together
with other creative minds. She is a project manager, communicator and
researcher in the fields of Human-robot-interaction (HRI)
and Educational Robotics. Her research focuses on holistic concepts in
user-centered design for Human-Robot Interaction, but is not limited to
this field. She has led workshops for children different ages to introduce
them to robotics from the product developer’s perspective.
Lara Lammer is a critical thinker who generates divers ideas and solutions
to address challenges of the 21st century, and conceptualizes them together
with other creative minds. She is a project manager, communicator and
researcher in the fields of Human-robot-interaction (HRI)
and Educational Robotics. Her research focuses on holistic concepts in
user-centered design for Human-Robot Interaction, but is not limited to
this field. She has led workshops for children different ages to introduce
them to robotics from the product developer’s perspective.
5. 4. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (10. prednáška)Peter Ondrúška: Samojazdiace automobily. V tejto prednáške hovoríme o princípe fungovania samojazdiacich automobilov. Najskôr hovoríme o hardware
a senzoroch ktoré možno nájsť na moderných samojazdiacich automobiloch a postupne hovoríme o software, ktorý
tieto dáta spracováva a riadi automobil. Vysvetľujeme princípy mapovania, lokalizácie, strojového učenia a
plánovania a ich úlohu v tom, ako za ich pomoci automobil vie zistiť svoju presnú pozíciu, čo je okolo a čo
robiť v rôznych situáciách. Taktiež hovoríme o výskume v tejto oblasti, kto ho robí, aké sú problémy, ktoré
treba ešte prekonať a ako samojazdiace automobily zmenia spoločnosť.
V tejto prednáške hovoríme o princípe fungovania samojazdiacich automobilov. Najskôr hovoríme o hardware
a senzoroch ktoré možno nájsť na moderných samojazdiacich automobiloch a postupne hovoríme o software, ktorý
tieto dáta spracováva a riadi automobil. Vysvetľujeme princípy mapovania, lokalizácie, strojového učenia a
plánovania a ich úlohu v tom, ako za ich pomoci automobil vie zistiť svoju presnú pozíciu, čo je okolo a čo
robiť v rôznych situáciách. Taktiež hovoríme o výskume v tejto oblasti, kto ho robí, aké sú problémy, ktoré
treba ešte prekonať a ako samojazdiace automobily zmenia spoločnosť.
videozáznam prednášky Peter Ondrúška získal PhD na Univerzite v Oxforde v obore robotika, kde pracoval na vývoji autonómnych
automobilov. Jeho špecializáciou je strojové učenie, robotické plánovanie a otázka: ako sa roboty dokážu
učiť z demonštrácií. Peter má na konte niekoľko úspechov z medzinárodných programátorských súťaží a počas
štúdia absolvoval stáže v Google, Facebooku a Microsoft Research. Po skončení štúdia založil startup Blue
Vision Labs, ktorý sa venuje vývoju novej technológie pre strojovú inteligenciu.
Peter Ondrúška získal PhD na Univerzite v Oxforde v obore robotika, kde pracoval na vývoji autonómnych
automobilov. Jeho špecializáciou je strojové učenie, robotické plánovanie a otázka: ako sa roboty dokážu
učiť z demonštrácií. Peter má na konte niekoľko úspechov z medzinárodných programátorských súťaží a počas
štúdia absolvoval stáže v Google, Facebooku a Microsoft Research. Po skončení štúdia založil startup Blue
Vision Labs, ktorý sa venuje vývoju novej technológie pre strojovú inteligenciu.
1. 3. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (9. prednáška)Rastislav Tribula a Ján Capák: Vývoj mobilných robotických systémov pre prax od A po Z.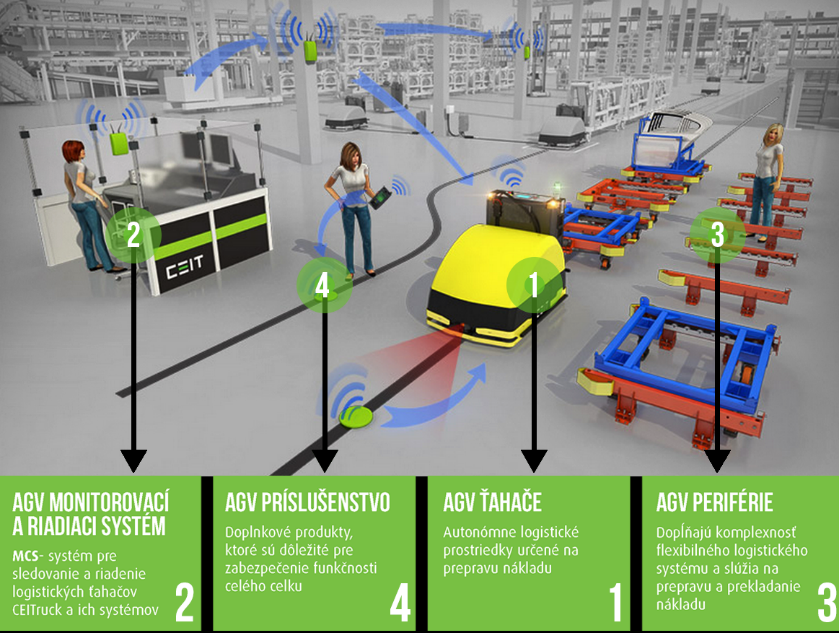 Seminár sa skladá z troch častí:
Seminár sa skladá z troch častí:
1. Časť: Začiatky projektov pre prax prerod z laboratórnych testov do praxe. Páni predstavia ako začínali, od súťaží cez malé stolové riešenia, prvé prototypy, prvá „malosériová výroba“ na pôde univerzity, prvé reálne nasadenie u zákazníka a testovanie vo výrobnom procese až po súčasnú výrobu a realizáciu projektov.
2. Časť: Mechanické prevedenie prvej až tretej modulárnej konštrukcie. Spojenie s údržbou a servisom. Nepredvídané a neočakávané poruchy, ktoré sa prejavovali až po reálnom nasadzovaní, na čo myslieť pri návrhu konštrukcií.
3. Časť: Hardvérový a softvérový vývoj, riešenia od vlastných PC až po súčasné priemyselné platformy. Vývoj navigácie po magnetickej páske a laserová navigácia. Nepredvídané vlastnosti prevádzkových podmienok, spoľahlivosť a stabilita systému.
 Ing. Rastislav Tribula, PhD., v súčasnosti pracuje ako vedúci technického oddelenia pre vnútorný
výskum a vývoj vo firme CEIT Technical Innovation s.r.o.. Vedie tým ľudí ktorý sa špecializuje na
vývoj produktov v oblasti automatizácie logistiky po konštrukčnej, hardvérovej a softvérovej stránke.
Ukončil vzdelanie tretieho stupňa na Žilinskej Univerzite v Žiline v odbore časti a mechanizmy
strojov. Je autorom a spoluautorom piatich úžitkových vzorov. V roku 2015 získal ocenenie
„Národná cena produktivity za rok 2014 za dlhodobý prínos k zvyšovaniu produktivity na Slovensku“.
Ing. Rastislav Tribula, PhD., v súčasnosti pracuje ako vedúci technického oddelenia pre vnútorný
výskum a vývoj vo firme CEIT Technical Innovation s.r.o.. Vedie tým ľudí ktorý sa špecializuje na
vývoj produktov v oblasti automatizácie logistiky po konštrukčnej, hardvérovej a softvérovej stránke.
Ukončil vzdelanie tretieho stupňa na Žilinskej Univerzite v Žiline v odbore časti a mechanizmy
strojov. Je autorom a spoluautorom piatich úžitkových vzorov. V roku 2015 získal ocenenie
„Národná cena produktivity za rok 2014 za dlhodobý prínos k zvyšovaniu produktivity na Slovensku“.
prezentačné video videozáznam prednášky Ing. Ján Capák, v súčasnosti pracuje vo firme CEIT Technical Innovation s.r.o. ako špecialista
pre hardvérový a softvérový vývoj produktov pre automatizovanú logistiku. Je špecialista v oblasti
navigácie mobilných robotických systémov a taktiež riadenia pohonov. Inžinierske štúdium absolvoval
na Žilinskej Univerzite v Žiline na katedre Riadiacich a informačných systémov. Je autorom a
spoluautorom troch úžitkových vzorov spojených s riadením automatických vedeného vozidla.
Ing. Ján Capák, v súčasnosti pracuje vo firme CEIT Technical Innovation s.r.o. ako špecialista
pre hardvérový a softvérový vývoj produktov pre automatizovanú logistiku. Je špecialista v oblasti
navigácie mobilných robotických systémov a taktiež riadenia pohonov. Inžinierske štúdium absolvoval
na Žilinskej Univerzite v Žiline na katedre Riadiacich a informačných systémov. Je autorom a
spoluautorom troch úžitkových vzorov spojených s riadením automatických vedeného vozidla.
1. 2. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (8. prednáška)Ján Bačík: Od súťaže Istrobot ku Fábii Tento seminár je v prvej časti zameraný hlavne na mladých vývojárov,
ktorí majú skúsenosti s rôznymi robotickými súťažami a hľadajú cesty ako sa
naďalej robotike venovať a rozvíjať svoje znalosti. V druhej časti
predstavíme jeden z odvážnych projektov Smart Robotic Systems a to
senzorickú platformu určenú pre automobil Škoda Fábia.
Tento seminár je v prvej časti zameraný hlavne na mladých vývojárov,
ktorí majú skúsenosti s rôznymi robotickými súťažami a hľadajú cesty ako sa
naďalej robotike venovať a rozvíjať svoje znalosti. V druhej časti
predstavíme jeden z odvážnych projektov Smart Robotic Systems a to
senzorickú platformu určenú pre automobil Škoda Fábia.
prezentácia, videozáznam prednášky
Ján Bačík pôsobí ako odborný asistent na katedre elektrotechniky a mechatroniky Technickej univerzity v Košiciach. Spolu s kolegom Františkom Ďurovským založili pred 3 rokmi vývojarský tím Smart Robotic Systems zameraný na pokročilé robotické aplikácie založené na open-source frameworku ROS a na popularizáciu robotiky na verejnosti.
4. 1. 2017, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (3. cvičenie)Andrej Lúčny: Behaviorálna robotika Abstrakt: Behaviorálna robotika vychádza z alternatívnej dekompozície riadenia robota, pri ktorej jeho
softwarové moduly zodpovedajú jednotlivým správaniam robota, ako je napríklad vyhýbanie sa prekážkam,
prehľadávanie priestoru či navigácia na určité miesto. Tento koncept sme si vyskúšali na riadení simulovaného
robota podobného robotovi ALLEN (Brooks, 1986), tj. na robotovi valcovitého tvaru s dvojkolesovým podvozkom,
dotykovým senzorom a dvanástimi ultrazvukovými senzormi. Pracovali sme pritom v jazyku Java, ktorého znalosť
nebola nevyhnutná, lebo sme z neho potrebovali len tie najjednoduchšie veci. Používaný software na stiahnutie
je tu (v ňom viď súbor readme). Video z úvodu cvičenia je
tu.
Abstrakt: Behaviorálna robotika vychádza z alternatívnej dekompozície riadenia robota, pri ktorej jeho
softwarové moduly zodpovedajú jednotlivým správaniam robota, ako je napríklad vyhýbanie sa prekážkam,
prehľadávanie priestoru či navigácia na určité miesto. Tento koncept sme si vyskúšali na riadení simulovaného
robota podobného robotovi ALLEN (Brooks, 1986), tj. na robotovi valcovitého tvaru s dvojkolesovým podvozkom,
dotykovým senzorom a dvanástimi ultrazvukovými senzormi. Pracovali sme pritom v jazyku Java, ktorého znalosť
nebola nevyhnutná, lebo sme z neho potrebovali len tie najjednoduchšie veci. Používaný software na stiahnutie
je tu (v ňom viď súbor readme). Video z úvodu cvičenia je
tu.
7. 12. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (7. prednáška)Jozef Rodina a Jopy Hečko: Čo všetko a ako sa dá robiť s dronmi Tento seminár sa bude skladať z dvoch častí. V tej prvej Richard Balogh zastupujúci Jozefa Rodinu
vysvetlil čo je to dron,
prečo sa vlastne používajú multirotorové lietajúce stroje a čo vlastne znamená ovládať a riadiť
dron. Trocha fyziky a matematiky k tomu potrebnej. (
slajdy z prednášky).
Tento seminár sa bude skladať z dvoch častí. V tej prvej Richard Balogh zastupujúci Jozefa Rodinu
vysvetlil čo je to dron,
prečo sa vlastne používajú multirotorové lietajúce stroje a čo vlastne znamená ovládať a riadiť
dron. Trocha fyziky a matematiky k tomu potrebnej. (
slajdy z prednášky).
V druhej časti seminára predvedie Jopy Hečko aké stroje sa používajú pri filmovaní, pre nakrúcanie unikátnych záberov z vtáčej perspektívy. Aká sa používa technika, čo na to treba, aké majú skúsenosti i veselé príhody z nakrúcania.
videozáznam prednášky Jozef Rodina je absolventom FEI STU v Bratislave. Venuje sa riadeniu nestabilných robotických
platforiem s využitím inerciálnych snímačov. Pracuje ako odborný asistent na Ústave robotiky a kybernetiky,
kde je jeho hlavnou náplňou výskum a vývoj, ako i pedagogika v oblasti vnorených systémov.
Je zakladateľom startupu Aerobtec, kde sa venujú vývoju subsystémov pre drony a avionike
pre leteckých modelárov.
Jozef Rodina je absolventom FEI STU v Bratislave. Venuje sa riadeniu nestabilných robotických
platforiem s využitím inerciálnych snímačov. Pracuje ako odborný asistent na Ústave robotiky a kybernetiky,
kde je jeho hlavnou náplňou výskum a vývoj, ako i pedagogika v oblasti vnorených systémov.
Je zakladateľom startupu Aerobtec, kde sa venujú vývoju subsystémov pre drony a avionike
pre leteckých modelárov.
 Jopy je surfer. V živote sa už venoval všetkému možnému, vrátane
grafického dizajnu (napr. plagáty pre súťaž Istrobot), robotiky (víťaz jedného
z prvých ročníkov), tancu, skydivingu a wakeboardingu. Pracuje ako operátor leteckého kamerového
systému, fotograf a grafický dizajnér v startupe Skyeye.
Jopy je surfer. V živote sa už venoval všetkému možnému, vrátane
grafického dizajnu (napr. plagáty pre súťaž Istrobot), robotiky (víťaz jedného
z prvých ročníkov), tancu, skydivingu a wakeboardingu. Pracuje ako operátor leteckého kamerového
systému, fotograf a grafický dizajnér v startupe Skyeye.
2. 11. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (6. prednáška)Pavol Boško a Radoslav Kováč: Robotour Súťaž Robotour, s podtitulom "outdoor delivery challenge" vzikla v roku
2006 ako malá verzia Robotchallenge.. Ide o to, aby robot dokázal v parku dopraviť
nejaký užitočný náklad (napr. súdok s pivom) z bodu A do bodu B. Sám, bez pomoci
človeka. Pavol Boško sa súťaže zúčastňuje od jej prvého ročníka a tentoraz jeho tím
Istrobotics zvíťazil. Aké sú skúsenosti
so súťažou a v čom spočíva tajomstvo ich tohtoročného úspechu? Čo všetko by mal
robot na súťaži vedieť. Aký hardware robot obsahuje, aké má senzory, elektroniku
a ako funguje jeho software. Rady pre tých čo chcú začať.
Súťaž Robotour, s podtitulom "outdoor delivery challenge" vzikla v roku
2006 ako malá verzia Robotchallenge.. Ide o to, aby robot dokázal v parku dopraviť
nejaký užitočný náklad (napr. súdok s pivom) z bodu A do bodu B. Sám, bez pomoci
človeka. Pavol Boško sa súťaže zúčastňuje od jej prvého ročníka a tentoraz jeho tím
Istrobotics zvíťazil. Aké sú skúsenosti
so súťažou a v čom spočíva tajomstvo ich tohtoročného úspechu? Čo všetko by mal
robot na súťaži vedieť. Aký hardware robot obsahuje, aké má senzory, elektroniku
a ako funguje jeho software. Rady pre tých čo chcú začať.
videozáznam prednášky
Pavol Boško vyštudoval FEI STU v Bratislave s diplomovou prácou zameranou na senzorový podsystém mobilného robota. Je jedným zo zakladajúcich členov občianskeho združenia Robotika.sk a amatérsky robotik, ktorý sa už dlhé roky zúčastňuje súťaže Robotour. Okrem toho je aj pravidelným účastníkom súťaže Istrobot s robotom Pablo III.
Radoslav Kováč je tiež absolventom FEI STU, ktorý sa zúčastňuje robotických súťaží s tímom LNX robots (a obvykle ich vyhráva). V súčasnosti vedie krúžok programovania a robotiky v Bratislave na ZŠ Hargašova a behá od Tatier k Dunaju.
5. 10. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (5. prednáška)Luděk Žalud: ATEROS - Autonómno-teleprezentačný robotický systém Bude predstavený prieskumný a mapovací robotický systém ATEROS vyvíjaný na ÚAMT FEKT Vysokého učení technického v Brne. V rámci prednášky bude vymedzený pojem servisná robotika a budú uvedené možné úlohy riešiteľné pomocou servisných robotov. Ďalej budú predstavené jednotlivé roboty systému ATEROS vyvíjané na VUT v Brne. V krátkosti budú taktiež predstavené jednotlivé odborné činnosti riešené v rámci systému ATEROS - sebalokalizácia vo vnútornom a vonkajšom prostredí, automatické skenovanie priestoru pomocou pozemných i lietajúcich robotických prostriedkov, autonómne meranie intenzity radiácie, teleprezencia, rozšírená realita, multispektrálna optická dátová fúzia. Podrobnejšie bude predstavený a predvedený jeden z väčších robotov.
Bude predstavený prieskumný a mapovací robotický systém ATEROS vyvíjaný na ÚAMT FEKT Vysokého učení technického v Brne. V rámci prednášky bude vymedzený pojem servisná robotika a budú uvedené možné úlohy riešiteľné pomocou servisných robotov. Ďalej budú predstavené jednotlivé roboty systému ATEROS vyvíjané na VUT v Brne. V krátkosti budú taktiež predstavené jednotlivé odborné činnosti riešené v rámci systému ATEROS - sebalokalizácia vo vnútornom a vonkajšom prostredí, automatické skenovanie priestoru pomocou pozemných i lietajúcich robotických prostriedkov, autonómne meranie intenzity radiácie, teleprezencia, rozšírená realita, multispektrálna optická dátová fúzia. Podrobnejšie bude predstavený a predvedený jeden z väčších robotov.
videozáznam prednášky
Luděk Žalud je vedúci odbornej skupiny Robotika a umělá inteligence na Ústavu automatizace a měřicí techniky na Vysokém učení technickém v Brne, profesor na ÚAMT VUT a vedúci Laboratoře teleprezence a robotiky na CEITEC VUT. Medzi jeho odborné záujmy patrí teleprezencia, mobilné roboty pre extrémne podmienky, optická multispektrálna fúzia, sebalokalizácia a biofeedback. Je garantom štyroch megisterských a bakalárskych predmetov z oblasti robotiky.
7. 9. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (4. prednáška)Michal Malý: Použitie 3D skenera s vysokým rozlíšením v robotike Predstavíme princíp fungovania 3D skeneru, a pohovoríme o jeho
vývoji. Krátko spomenieme aj to, ako sa dá takýto vývoj robiť
vo firemných podmienkach na Slovensku. Spomenieme rôzne fyzikálne
obmedzenia, ktoré súvisia s 3D skenovaním, ako aj praktické
problémy. Súčasťou prednášky bude aj ukážka skenovania a lokalizácie.
Predstavíme princíp fungovania 3D skeneru, a pohovoríme o jeho
vývoji. Krátko spomenieme aj to, ako sa dá takýto vývoj robiť
vo firemných podmienkach na Slovensku. Spomenieme rôzne fyzikálne
obmedzenia, ktoré súvisia s 3D skenovaním, ako aj praktické
problémy. Súčasťou prednášky bude aj ukážka skenovania a lokalizácie.
slajdy vo formáte pdf videozáznam prednášky
Michal Malý získal PhD v odbore informatiky zameranej na umelú inteligenciu na Fakulte matematiky, fyziky a informatiky Univerzity Komenského v Bratislave. Je expertom na tvorbu inteligentných agentov založených na učení odmenou a trestom. Pracoval taktiež v oblasti počítačovej bezpečnosti, v ktorej je autorom inovatívneho riešenia bezpečných distribuovaných výpočtov. Jeho ambíciou je naučiť stroje lepšie vnímať trojrozmerný priestor okolo seba a chápať aké objekty sú v ňom umiestnené.
3. 8. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (2. cvičenie)Andrej Lúčny: Riadenie simulátora iCubSim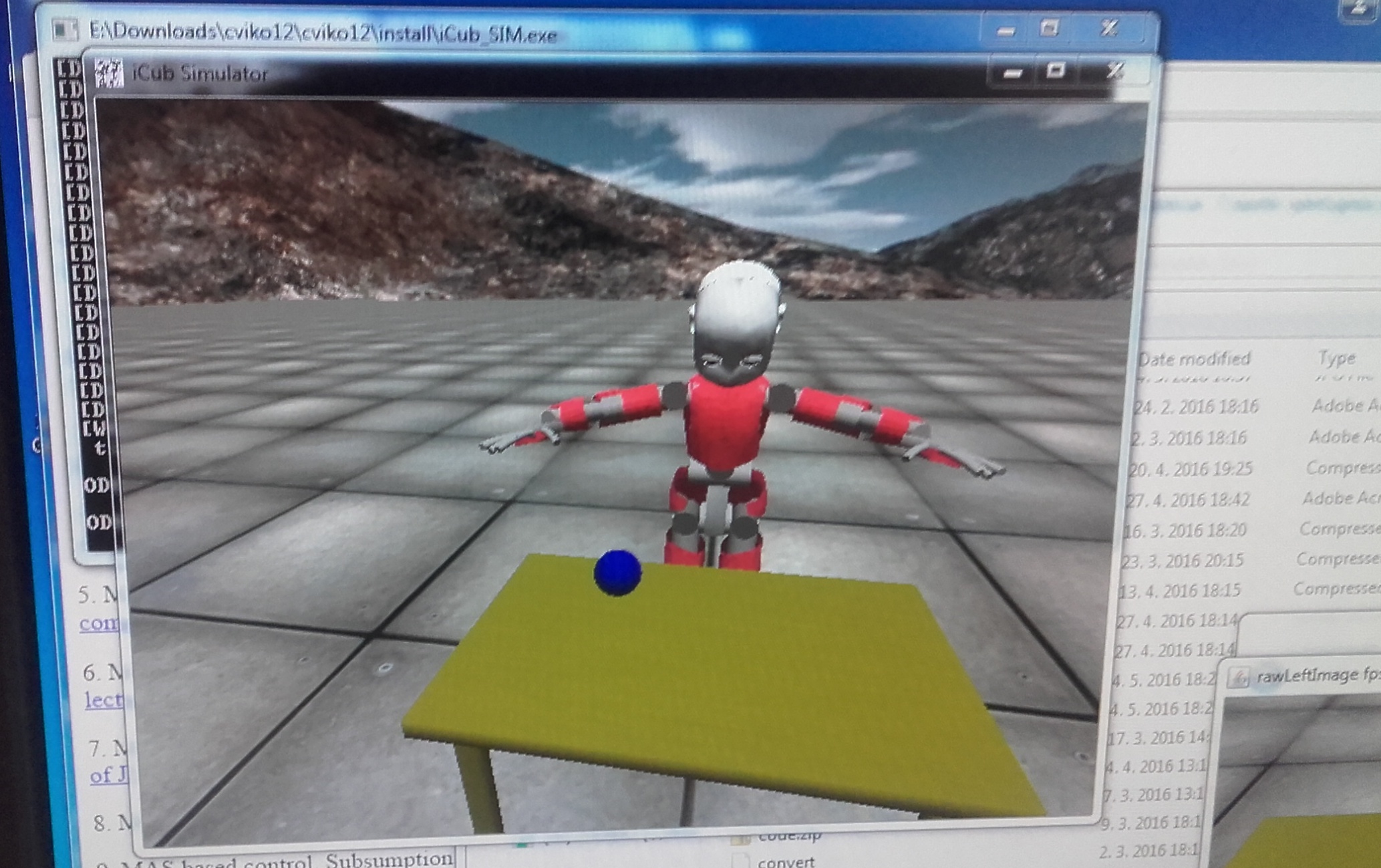 Ovládanie simulátora iCubSim. Princíp stelesnenosti (embodiment). Ako nasmerovať hlavu robota za objektom v scéne. Ako objekt zraziť zo stola rukou.
K dispozícii je aj študijný text,
ale je nevyhnutné ho študovať (a je len pre Linux, zatiaľ čo cvičenie bude na windowsoch).
Ovládanie simulátora iCubSim. Princíp stelesnenosti (embodiment). Ako nasmerovať hlavu robota za objektom v scéne. Ako objekt zraziť zo stola rukou.
K dispozícii je aj študijný text,
ale je nevyhnutné ho študovať (a je len pre Linux, zatiaľ čo cvičenie bude na windowsoch).
softwarový balík (postupujte podľa readme.txt)
6. 7. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (1. cvičenie)Andrej Lúčny: Riadenie robota BoeBot Ako zariadiť, aby sa robot držal so svojom výbehu a sledoval pritom pingpongovú loptičku?
Aby zvládol jej zákryt a zamerať svoju pozornosť na jednu z viacerých loptičiek vo výbehu?
Je potrebné si priniesť vlastný notebook s wifi a ako-tak poznať programovací jazyk Java.
K dispozícii je aj študijný text,
ale je nevyhnutné ho študovať (a je v ňom použitý iný programovací jazyk).
Ako zariadiť, aby sa robot držal so svojom výbehu a sledoval pritom pingpongovú loptičku?
Aby zvládol jej zákryt a zamerať svoju pozornosť na jednu z viacerých loptičiek vo výbehu?
Je potrebné si priniesť vlastný notebook s wifi a ako-tak poznať programovací jazyk Java.
K dispozícii je aj študijný text,
ale je nevyhnutné ho študovať (a je v ňom použitý iný programovací jazyk).
softwarový balík (postupujte podľa readme.txt)
1. 6. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (3. prednáška)Andrej Pauliny: 3D-printed humanoid Ako si vytlačiť humaniodného robota na 3D tlačiarni a ako ho poskladať a oživiť?
"V súčasnosti sa často dozvedáme o úspechoch v oblasti humanoidnej robotiky. Chcel som sa bližšie oboznámiť s možnosťami a schopnosťami humanoidných robotov. Preto som sa pred asi 3 rokmi rozhodol postaviť si humanoidného robota.
Na základe vtedajšieho stavu som sa rozhodol postaviť robota InMoov . Celý robot je navrhnutý tak, aby sa dal vytlačiť pomocou 3D tlačiarne. Všetky diely robota sú publikované ako open-source. Rozhodol som sa na tento účel použiť ( a postaviť) 3D-tlačiareň RepRap Prusa Iteration 2.
Postupne som tlačil zverejnené dielce a pri tom som skladal robota. Neskôr som niektoré dielce upravoval a nakoniec som dielce aj sám navrhoval a publikoval. V súčasnosti navrhujem dielce pre mechanizmus nôh robota a popri tom pokračujem v oživovaní hornej polovice robota."
opisuje tento process autor prenášky.
Ako si vytlačiť humaniodného robota na 3D tlačiarni a ako ho poskladať a oživiť?
"V súčasnosti sa často dozvedáme o úspechoch v oblasti humanoidnej robotiky. Chcel som sa bližšie oboznámiť s možnosťami a schopnosťami humanoidných robotov. Preto som sa pred asi 3 rokmi rozhodol postaviť si humanoidného robota.
Na základe vtedajšieho stavu som sa rozhodol postaviť robota InMoov . Celý robot je navrhnutý tak, aby sa dal vytlačiť pomocou 3D tlačiarne. Všetky diely robota sú publikované ako open-source. Rozhodol som sa na tento účel použiť ( a postaviť) 3D-tlačiareň RepRap Prusa Iteration 2.
Postupne som tlačil zverejnené dielce a pri tom som skladal robota. Neskôr som niektoré dielce upravoval a nakoniec som dielce aj sám navrhoval a publikoval. V súčasnosti navrhujem dielce pre mechanizmus nôh robota a popri tom pokračujem v oživovaní hornej polovice robota."
opisuje tento process autor prenášky.
slajdy vo formáte pdf videozáznam prednášky Andrej Pauliny pochádza z Bratislavy, študoval na katedre Rádioelektroniky na Fakulte elektrotechniky a informatiky STU v Bratislave. Pôsobí vo firme ANASOFT APR ako SW developer. Robotike sa venuje najmä ako hobby. Zvíťazil v súťaži mobilných robotov ISTROBOT. V dvoch sezónach úspešne viedol team súťaže FIRST LEGO League.
Andrej Pauliny pochádza z Bratislavy, študoval na katedre Rádioelektroniky na Fakulte elektrotechniky a informatiky STU v Bratislave. Pôsobí vo firme ANASOFT APR ako SW developer. Robotike sa venuje najmä ako hobby. Zvíťazil v súťaži mobilných robotov ISTROBOT. V dvoch sezónach úspešne viedol team súťaže FIRST LEGO League.
4. 5. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava. (2. prednáška)Richard Balogh: Internet of Things a Crowdsourcing V súvislosti s Internetom vecí (IoT) sa objavilo veľké množstvo projektov, ktoré využívajú zber dat zo zariadení rozptýlených po celom svete. Ukážeme niekoľko príkladov takýchto projektov, ako je možné sa do nich zapojiť a aké sú ich prínosy. Zmienime sa aj o rizikách, ktoré tento typ projektov ohrozujú a znemožňujú ich dlhodobú prevádzku. Sú tieto projekty prostriedkom rozvoja občianskej spoločnosti, alebo len ďalším reklamným sloganom?
V súvislosti s Internetom vecí (IoT) sa objavilo veľké množstvo projektov, ktoré využívajú zber dat zo zariadení rozptýlených po celom svete. Ukážeme niekoľko príkladov takýchto projektov, ako je možné sa do nich zapojiť a aké sú ich prínosy. Zmienime sa aj o rizikách, ktoré tento typ projektov ohrozujú a znemožňujú ich dlhodobú prevádzku. Sú tieto projekty prostriedkom rozvoja občianskej spoločnosti, alebo len ďalším reklamným sloganom?
videozáznam prednášky
Richard Balogh pochádza z Bratislavy a pôsobí na Ústave automobilovej mechatroniky na Fakulte elektrotechniky a informatiky na STU v Bratislave. Študoval na Elektrotechnickej fakulte, kde na Ústave robotiky a kybernetiky získal PhD. Je zakladateľom občianskeho združenia Robotika.SK a hlavným organizátorom súťaže mobilných robotov ISTROBOT. Je spoluzakladateľom konferencie Robotics in Education. Mnoho úsilia venoval popularizácii robotiky a výchove mladých talentov v tejto oblasti.
6. 4. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava (1. prednáška). Slávnostné zahájenie seminára s príhovorom prof. Ing. Petra Hubinského, PhD.Matěj Hoffmann: Jak si humanoidní robot iCub s umělou kůží osahává svět: od inspirace v biologii k adaptivním a bezpečným strojům Roboti opouštějí omezená a dobře předvídatelná prostředí továren a vstupují do mnohem méně 'kontrolovaných' prostředí a dokonce začínají sdílet prostor s lidmi. V důsledku toho se musí dynamicky přizpůsobovat nepředvídatelným interakcím a zaručit bezpečnost vlastní i ostatních. Robotické technologie ale dosud často spoléhaly na 'slepě' vykonávané trajektorie koncového článku, zatímco zbytek těla byl reprezentován kinematickým řetězcem, přičemž objem a povrch celého těla nebyly zohledněny. Naproti tomu lidé i zvířata bez problémů ovládají svá vysoce složitá těla, integrují multimodální sensorické informace o jejich aktuální konfiguraci a poloze a automaticky zachovávají bezpečný odstup od předmětů ležících v cestě. Humanoidní robot iCub, který vedle 53 stupňů volnosti, kamer s antropomorfickým uspořádáním, a úhlových enkodérů nově disponuje umělou kůží po celém povrchu těla, má fyzické proporce a sensorický a motorický aparát, který je na určité úrovni abstrakce podobný primátům. Lze jej tak použít jako nástroj k rozšíření a ukotvení výpočetních modelů toho, jak mozek reprezentuje tělo a prostor okolo něj, přičemž právě taktilní modalita zde hraje klíčovou roli. Zároveň předvedeme, jak lze průzkum vlastního těla a jeho okolí pomocí dotyků aplikovat v robotice ke kinematické sebe-kalibraci a k vytvoření modelu 'peripersonálního prostoru', který může robot využít k předvídání kolizí s prostředím po celém povrchu svého těla.
Roboti opouštějí omezená a dobře předvídatelná prostředí továren a vstupují do mnohem méně 'kontrolovaných' prostředí a dokonce začínají sdílet prostor s lidmi. V důsledku toho se musí dynamicky přizpůsobovat nepředvídatelným interakcím a zaručit bezpečnost vlastní i ostatních. Robotické technologie ale dosud často spoléhaly na 'slepě' vykonávané trajektorie koncového článku, zatímco zbytek těla byl reprezentován kinematickým řetězcem, přičemž objem a povrch celého těla nebyly zohledněny. Naproti tomu lidé i zvířata bez problémů ovládají svá vysoce složitá těla, integrují multimodální sensorické informace o jejich aktuální konfiguraci a poloze a automaticky zachovávají bezpečný odstup od předmětů ležících v cestě. Humanoidní robot iCub, který vedle 53 stupňů volnosti, kamer s antropomorfickým uspořádáním, a úhlových enkodérů nově disponuje umělou kůží po celém povrchu těla, má fyzické proporce a sensorický a motorický aparát, který je na určité úrovni abstrakce podobný primátům. Lze jej tak použít jako nástroj k rozšíření a ukotvení výpočetních modelů toho, jak mozek reprezentuje tělo a prostor okolo něj, přičemž právě taktilní modalita zde hraje klíčovou roli. Zároveň předvedeme, jak lze průzkum vlastního těla a jeho okolí pomocí dotyků aplikovat v robotice ke kinematické sebe-kalibraci a k vytvoření modelu 'peripersonálního prostoru', který může robot využít k předvídání kolizí s prostředím po celém povrchu svého těla.
slajdy vo formáte pdf videozáznam prednášky Matěj Hoffmann pochádza z Prahy, študoval na tamojšom Matfyze odbor Informatika a umelá inteligencia (Univerzita Karlova). PhD získal na Artificial Intelligence Laboratory, University of Zurich (Prof. Rolf Pfeifer), kde sa zapojil do NoE EU Cognition a obznámil s humanoidným robotom iCub, ktorý z tejto inciatívy vzišiel. Od roku 2013 v práci s iCub-om pokračuje na Italian Institute of Technology v Janove (Marie Curie Experienced Researcher Fellowship).
Matěj Hoffmann pochádza z Prahy, študoval na tamojšom Matfyze odbor Informatika a umelá inteligencia (Univerzita Karlova). PhD získal na Artificial Intelligence Laboratory, University of Zurich (Prof. Rolf Pfeifer), kde sa zapojil do NoE EU Cognition a obznámil s humanoidným robotom iCub, ktorý z tejto inciatívy vzišiel. Od roku 2013 v práci s iCub-om pokračuje na Italian Institute of Technology v Janove (Marie Curie Experienced Researcher Fellowship).
2. 3. 2016, 17:30-19:00, FabLab, CVTI, Ilkovičova 8, Bratislava (0. prednáška, testovacia prevádzka).Andrej Lúčny: Ovládanie simulovaného humanoidného robota iCubSim pomocou architektúry Agent-Space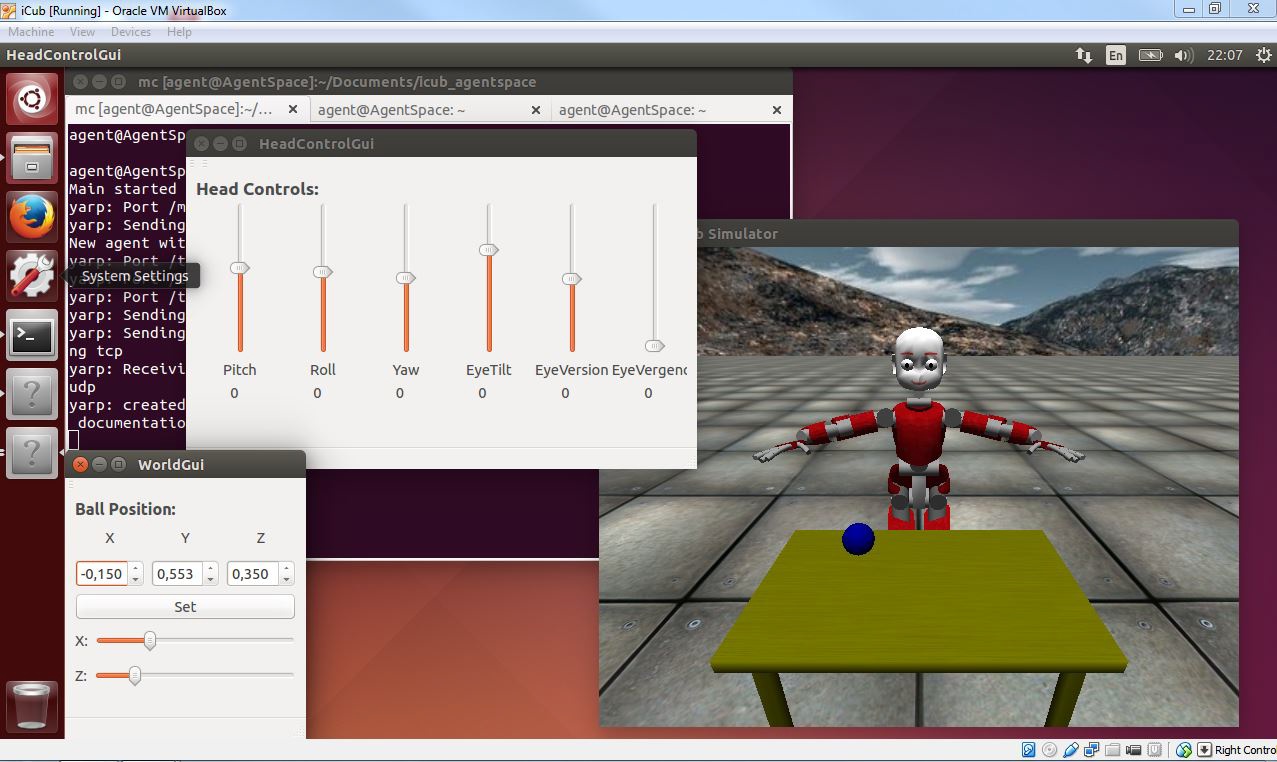 K humanoidnému robotu iCub je voľne dostupný pomerne kvalitný simulátor iCubSim. V spolupráci s Matúšom Kopernickým sa podarilo do neho implementovať riadenie na báze architektúry Agent-Space. Túto architektúru navrhol prednášajúci ako jednu z možných implementácii Minského predstavy o mysli ako spoločenstve agentov. Z technického pohľadu vychádza z Brooksovej subsumpčnej architektúry, ale spôsob komunikácie modulov systému je realizovaný na spôsob multi-agentového systému so stigmergickou komunikáciou. Funkčnosť riadenia je demonštrovaná na príklade ovládania hlavy a očí robota sledujúceho pohyblivú loptičku na stole, ktorý je výsledkom interakcie deviatich pomerne jednoduchých agentov.
K humanoidnému robotu iCub je voľne dostupný pomerne kvalitný simulátor iCubSim. V spolupráci s Matúšom Kopernickým sa podarilo do neho implementovať riadenie na báze architektúry Agent-Space. Túto architektúru navrhol prednášajúci ako jednu z možných implementácii Minského predstavy o mysli ako spoločenstve agentov. Z technického pohľadu vychádza z Brooksovej subsumpčnej architektúry, ale spôsob komunikácie modulov systému je realizovaný na spôsob multi-agentového systému so stigmergickou komunikáciou. Funkčnosť riadenia je demonštrovaná na príklade ovládania hlavy a očí robota sledujúceho pohyblivú loptičku na stole, ktorý je výsledkom interakcie deviatich pomerne jednoduchých agentov.
slajdy vo formáte pdf video zo slajdov videozáznam prednášky
Andrej Lúčny pochádza z Banky pri Piešťanoch a pôsobí na Katedre aplikovanej informatiky na Matfyze v Bratislave, kde vyštudoval odbor umelá inteligencia (prof. Jozef Kelemen) a získal doktorát z aplikovanej informatiky. V značnej miere pôsobí v komerčnej sfére (MicroStep-MIS, ME-Inspection). Je spoluzakladateľom občiaskych združení Robotika.SK a Trojsten. Istý čas pôsobil ako hlavný porotca Central European Regional ACM Programming Contest a je pravidelným porotcom súťaže mobilných robotov ISTROBOT.