
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
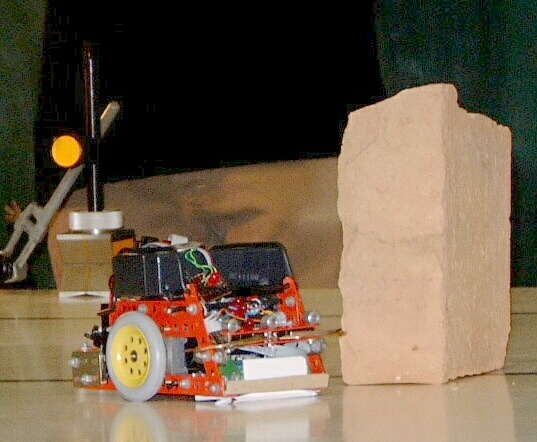
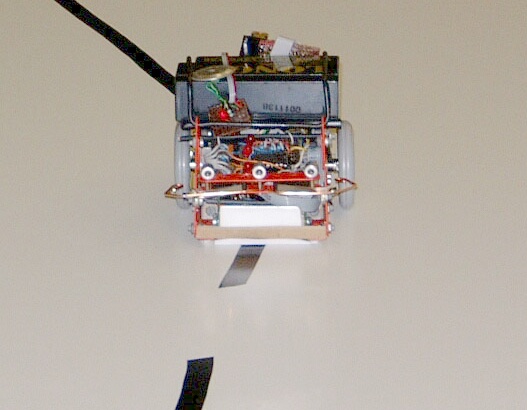
Bol určený pre súťaž v hľadaní čiary a vyhýbaní sa prekážkam na dráhe. Pre tento účel bol aj skonštruovaný. Mojím cieľom bolo urobiť čo najjednoduchšiu mechanickú a elektrickú časť a zvyšok nechať na programe.
![]()
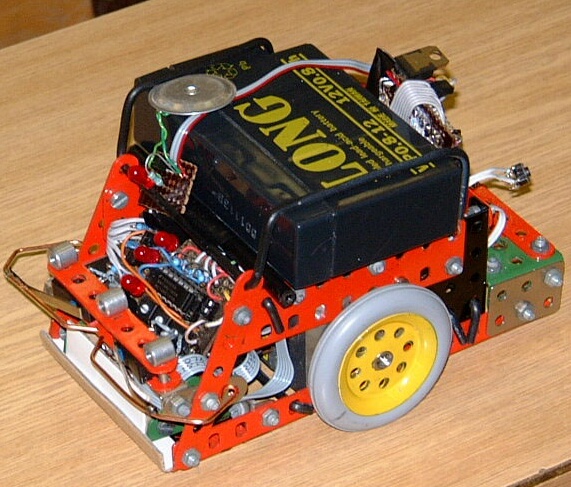
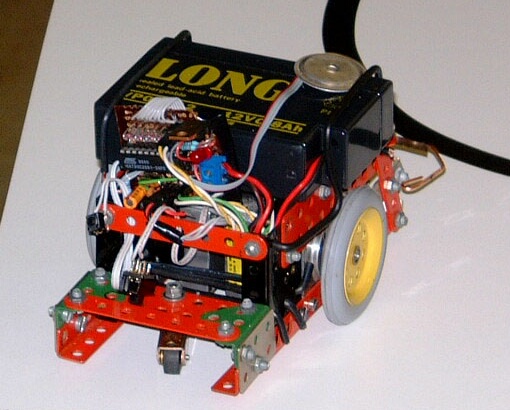
Mozgom celého zariadenia je jednočipový mikroprocesor rady '51' s pamäťou pre program veľkosti 2048 bajtov a pamäťou pre dáta veľkosti 128 bajtov, konkrétne AT90C2051 taktovaný 12 MHz keramickým oscilátorom. Algoritmus sa skladá z väčších blokov, ako sú podprogram pre ovládanie krokových motorov, podprogram pre získavanie stavu senzorov a ich filtráciu, podprogram pre udržanie robota na čiare a podprogram pre obchádzanie prekážky.
Mechanická konštrukcia vychádza zo známej stavebnice MERKUR, ktorú som doplnil o krokové motory, optické senzory, mikrospínače a akumulátor. Podvozok je klasická "trojkolka" - dve hnacie kolesá a jedno stabilizačné koleso.
Pre snímanie čiary som použil tri fototranzistory, ktoré snímali odraz svetla od povrchu dráhy. Pre požadovaný odraz a jeho snímanie som dráhu nasvecoval vysokosvietivými LED diódami. Signál z fototranzistorov bol zosilnený a upravený na TTL úrovne pre vstup do mikrokontroléru. Pre tento účel som použil invertor s otvoreným kolektorom typu 74HCT05. Prekážku som detekoval mikrospínačmi umiestnenými na prednej strane robota.
Pohon robota som riešil dvomi krokovými motormi bez prevodu, ktoré boli budené tranzistorovým poľom ULN2803. Riadiace signály pre výkonový budič boli generované priamo mikrokontrolérom.
Napájanie robota je z 12 voltového oloveného akumulátora s kapacitou 0.8 Ah. Výkonová časť je napájaná priamo 12-mi voltami a riadiaca časť 5-mi voltmi cez stabilizátor L7805.
Principiálna schéma zapojenia robota.
Pre prípadných záujemcov o bližšie informácie uvádzam moju mail-ovú adresu: robisko@post.cz.
Róbert Naništa
![]()
 |
 |
 |
 |
 |
 |
 |
 |
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2002 Richard Balogh
Posledná zmena: 19. septembra 2001.