Nohy navrhovaného podvozku sa pohybujú iba vo vertikálnej rovine rovnobežne s pozdĺžnou osou telesa robota. Takáto konštrukcia umožňuje natáčanie sa celého podvozku iba silou (jedna strana stojí a druha vykonáva pohyb). Na obr. č. 1b je 3D model nohy so skutočnými rozmermi a na obr. č. 1c je už zrealizovaná konštrukcia navrhnutej nohy.
Obr. 1. Idler - (a) kinematika nohy, (b) 3D model nohy, (c) realizácia nohy.
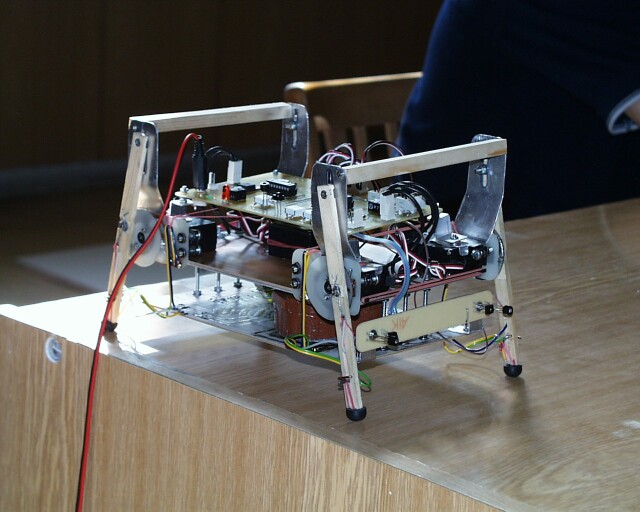
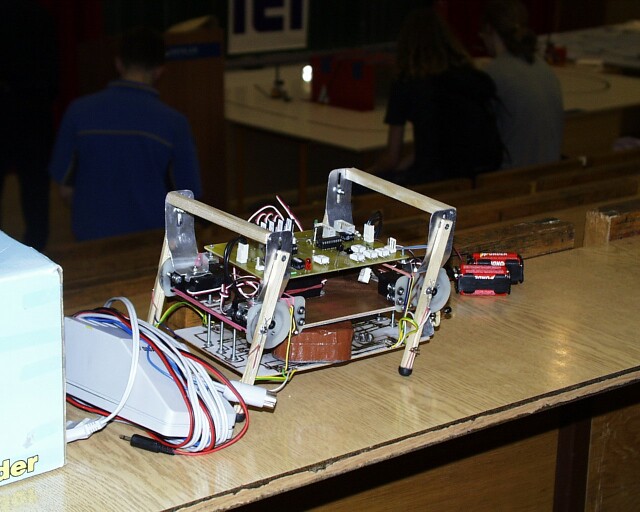
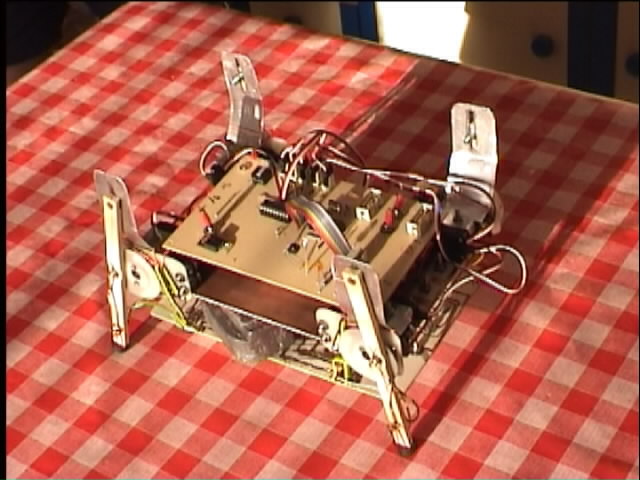
Ako rám podvozku realizovaného funkčného modelu som použil nosnú dosku (jednostranná doska plošného spoja). Ako pohony nôh som navrhol servomotorčeky s krútiacim momentom 0,35 Nm (ich veľkou výhodou je nízka hmotnosť - 45g). Keďže je dôležité, aby bolo zachované rovnomerné rozloženie hmotnosti, servomotorčeky na pohon nôh sú zrkadlovo otočené a umiestnené do kútov rámu (obr. č. 2).
Obr. 2. Rozloženie pohonov na ráme.
Pri zvolenej kinematike a rozložení hmotnosti navrhovaného štvornohého podvozku je potrebné uvažovať s vyvažovaním. Na vyvažovanie (premiestňovanie ťažiska) je použitý rovnaký typ servomotorčeka ako na pohony nôh. Na jeho prírube je upevnené rameno, na ktorom je závažie. Samotné vyvažovanie je založené na princípe rotácie závažia (obr. č. 3). Závažie musí mať definovanú hmotnosť pri malých obrysových rozmeroch, (odliatok z olova). Rameno a závažie tvoria jeden celok. Definovaný pohyb závažia (váži 780g), zaručuje systém odvaľovania pomocou troch kladiek. Dve kladky sa odvaľujú zo spodnej strany rámu a jedna kladka sa odvaľuje po doske, ktorá je umiestnená pod rámom a slúži tiež na spätnú väzbu polohy závažia.
Obr. 3. Závažie, pohľad zospodu.
Na obr. č. 2 pri každej prírube dvoma kruhmi je vyznačená vzdialenosť, ktorá predstavuje dĺžku jedného kroku (príruba sa otočí o 180°). Menšie kruhy vyznačujú kontakt nohy s podložkou, väčšie kruhy vyznačujú polohu nohy po uskutočnení jedného kroku. Bodkovanou čiarou s dvomi bodkami je vyznačený podporný štvoruholník, ktorý sa po zdvihu hociktorej nohy degeneruje na podporný trojuholník. V tomto trojuholníku sa musí nachádzať ťažisko podvozku, čo zabezpečuje premiestnenie závažia do daného trojuholníka.
Mechanika pohybu podvozku, typ chôdze, je nekontinuálny, to znamená, že presun ťažiska podvozku dopredu sa realizuje iba vtedy, keď sú všetky nohy bezpečne na zemi.
Pre pohyb podvozku dopredu je použitý nasledovný algoritmus kráčania. Východzia poloha podvozku je zhodná s obr. č. 2. Všetky nohy sú akoby vzadu vzhľadom na smer pohybu a tvoria podporný štvoruholník. Závažie musí byť v myslenom trojuholníku, ktorý tvoria nohy 1, 2, 3, ktoré majú kontakt s podložkou (sú v podpornej fáze). Noha 0 prechádza do prenosovej fázy. Počas prenosovej fázy sa noha zdvihne a presunie (na obr. z menšieho kruhu do väčšieho kruhu) sa na nové miesto - urobí krok. Hneť po započatí prenosovej fázy nohy 0 (po jej zdvihnutí), sa podporný štvoruholník degeneruje na podporný trojuholník, tvorený nohami 1, 2, 3.(obr. č. 4a). Ak má podvozok ostať stabilný, musí ťažisko podvozku spadať do podporného trojuholníka. V tejto prvej, ako aj v poslednej fáze, má podporný trojuholník najmenší obsah, preto je to kritická časť kráčania. Po skončení prenosovej fázy nohy 0 (kontakt nohy s podložkou) vzniká podporný štvoruholník, ktorý ma väčší obsah ako vo východzej polohe. Nasleduje presun závažia do trojuholníka tvoreného nohami 0, 2, 3. Následne prechádza noha 1 do prenosovej fázy (obr. č. 4b). Podporný trojuholník je väčší ako v predchádzajúcej fáze. Po skončení prenosovej fázy nohy 1, vznikne podporný štvoruholník. Nasleduje presun závažia do trojuholníka tvoreného nohami 1, 0, 3. Následne prechádza noha 2 do prenosovej fázy (obr. č. 4c). Podporný trojuholník je rovnaký ako v predchádzajúcej fáze. Po skončení prenosovej fázy nohy 2, vznikne podporný štvoruholník. Nasleduje presun závažia do trojuholníka tvoreného nohami 0, 1, 2. Následne prechádza noha 3 do prenosovej fázy (obr. č. 4d). ). Podporný trojuholník je rovnaký ako v prvej fáze (obr. č4a). Po skončení prenosovej fázy nohy 3, vznikne podporný štvoruholník. Nasleduje presun závažia do trojuholníka tvoreného nohami 1, 2, 3 (príprava na východziu polohu). Ako ďalší krok sa realizuje presun ťažiska (celé telo podvozku) smerom dopredu, a to tak, že všetky príruby servomotorčekou sa naraz pootočia o 180°, v tom isto zmysle, ako sa otáčali v prenosových fázach. Celý podvozok sa nadvihne a presunie zozadu dopredu do východzej polohy .
Otáčanie sa podvozku sa dá zabezpečiť iba tým, že jedna strana stojí a druha vykoná najprv prenosovú fázu a následne sa pootočí podvozok tak, že sa obe nohy, ktoré boli v prenosovej fáze (presunuli sa zozadu dopredu) naraz presunú späť dozadu - rovnakým smerom ako prebiehala prenosová fáza.. Tá strana, ktorá bola aktívna, sa nadvihne a pootočí okolo jednej z nôh, ktorá nevykonávala pohyb (podľa toho, nad ktorou nohou je závažie.).
Pri ľubovoľnom pohybe (dopredu, dozadu, otáčanie sa) musí byť zachovaná podmienka, že ťažisko podvozku musí spadať do podporného trojuholníka.
Obr. 4. Princíp kráčania.
Vnútorné snímače slúžia na určovanie polohy nôh a závažia. Všetky vnútorné snímače sú taktilné. Každá noha ma tri vnútorne snímače. Polohu nohy určuje kombinácia spomínaných troch snímačov.
Vonkajšie snímače slúžia na detekciu prekážky (vpravo - vľavo) a zapnutie/vypnutie. Použité snímače sú IR - vysielač, IR - prijímač. Prijímač aj vysielač sú umiestnené vedľa seba tak, aby nebolo možné priame ovplyvnenie IR - prijímača, iba od odrazenej plochy (prekážky). Pracujú na následovnom princípe: IR - dióda vyžaruje neviditeľné svetlo o určitej frekvencii. Ak sa pred podvozkom vyskytne prekážka, IR žiarenie sa od nej odrazí a IR prijímač ho zachytí a odovzdá mikropočítaču informáciu o prekážke. Snímač zapnutia/vypnutia je umiestnený na hardweri a je aktivovaný zaclonením (niekoľko cm nad) dlaňou alebo iným predmetom.
Podvozok je riadený dvoma mikropočítačmi (mP) PIC16F84A. Jeden z nich je nadradený (1) a druhý (2) je podradený (obr. č. 5). Medzi nimi je vytvorená štvorbitová jednosmerná paralelná zbernica. Nadradený mP1 sleduje informácie z vnútorných senzorov (poloha nohy, poloha závažia), z vonkajších senzorov (detekovanie prekážky, zapnutie/ vypnutie) a dáva príkazy mP2 pomocou štvorbitovej zbernice (16 možných príkazov - 24=16). Jeden výstup z mP1 je pripojený na reset mP2. Takéto zapojenie umožňuje ovládať, či je mP2 aktívny alebo nie pomocou mP1. Na výstupy mP2 sú pripojené všetky servomotorčeky a IR diódy. Takéto zapojenie si vyžaduje väčší odber energie, ale reakčná doba na zopnutie snímačov je veľmi krátka a celý systém môže vykonávať dva programy naraz.
Obr. 5 Všeobecná schéma riadenia.
Všetky snímače sleduje mP1 a vysiela príkaz na mP2, s ktorým motorčekom má točiť (resp. či aktivovať IR diódu). Ak mP1 zistí, že sa zmenil stav niektorých snímačov, resetne mP2 a vyšle mu nový príkaz (kód). Algoritmus riadenia je nasledovný. Po zapnutí podvozku sa aktivuje program v mP1. Aktivuje mP2 a vyšle príslušný kód, ktorý zodpovedá príkazu, aby mP2 aktivoval IR diódu určenú na zapínanie/vypínanie. Medzitým mP1 sleduje snímač zapnutia/vypnutia (IR prímač) a ak bol aktivovaný, následne sa detekuje prekážka pred podvozkom, ak je výsledok pozitívny, spúšťa sa program otáčania sa podvozku, ak je výsledok negatívny, spúšťa sa program kráčania vpred podľa spomínaného postupu kráčania. Medzi jednotlivými fázami sa detekujú snímače prekážok a snímač zapnutia/vypnutia. Pokiaľ nie je výsledok z týchto snímačov pozitívny, prebieha kráčanie dopredu. Pokiaľ je výsledok zo snímačov prekážky pozitívny, nastáva otáčanie sa podvozku, až kým nieje informácia o prekážkach negatívna. Potom, ak nie je informácia o zapnutí/ vypnutí pozitívna, nasleduje kráčanie vpred, v opačnom prípade dôjde k vypnutiu (pohotovostný režim).
Pri návrhu konštrukcie kráčajúceho podvozku ako aj spracovaní jeho konštrukčnej dokumentácie som využíval CAD systém Solid Edge (obr. č. 6). Pri realizácii konštrukcie bola hlavným problémom presnosť výroby jednotlivých dielcov a dodržanie stanovenej úrovne hmotnosti celého podvozku. Zhotovená konštrukcia má rozmery (d/v/š) 220/160/180, hmotnosť 1460 g, dĺžku kroku 60 mm, napájacie napätie 5 V. Riešenie sa nachádza v štádiu oživeného funkčného modelu, na ktorom sa vykonávajú funkčné a prevádzkové testy.
Obr. 6 Mechanická konštrukcia - 3D.
Kontakt:
Martin Nemec
Katedra robotiky, Strojnícka fakulta TU Košice,
B. Němcovej 32, 042 62 Košice,
E-mail: mojrobot@szm.sk
Martin Nemec
![]()

© 2002 Richard Balogh
Posledná zmena: 19. septembra 2001.