![]()
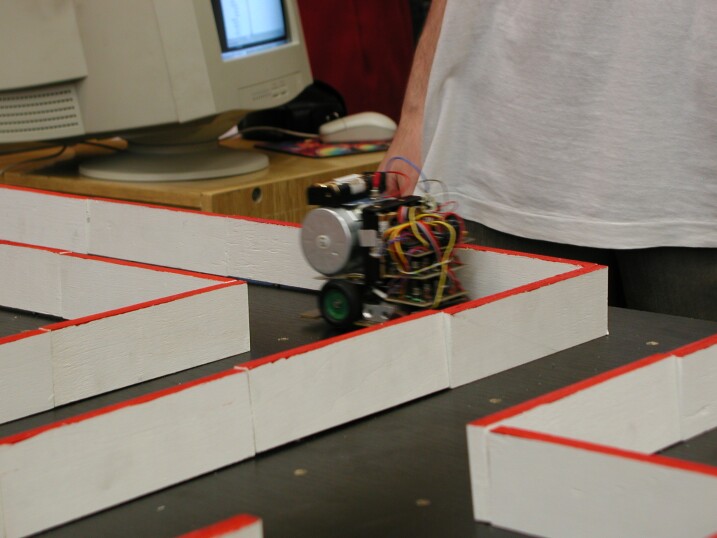
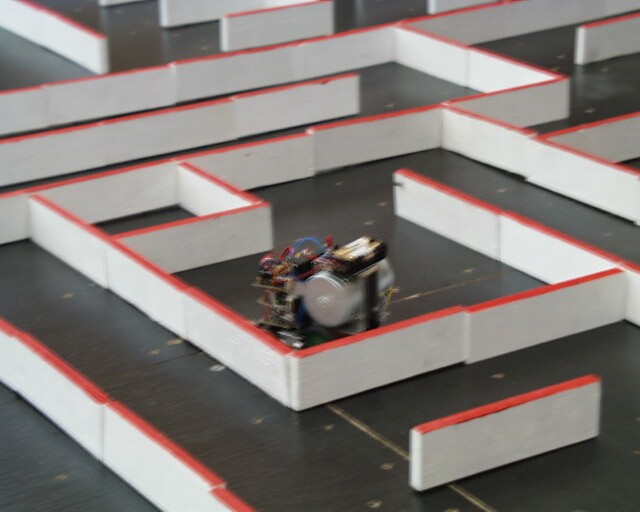
Robot je určený na disciplíny Pathfollower a Micromouse do súťaže s robotmi, na Fakulte elektrotechniky a informatiky v Bratislave.
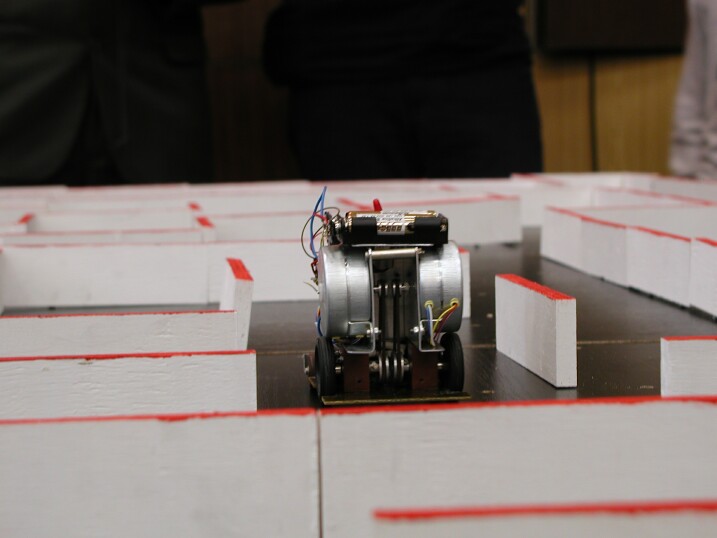
Robot je stavaný ako autonómny robot na štyroch kolesách. Zadné dve sú ovládané dvomi osem-fázovými krokovými motormi. Pohon z motorov na kolesá je realizovaný remeňovým prevodom. Ako remene sú použité gumičky zo servo ovládačov. Predné kolesá sú bez náhonu. Predný nárazník pri zatlačení spína spínače. Jeho upevnenie je realizované pomocou skrutiek s pružinami.
Predný senzor je tvorený nárazníkom, ktorý zopína spínač. Senzory na čiaru sú realizované pomocou dvoch fototranzistorov. Tie sú nasmerované obidva na čiaru. Pri vychýlení jeden zareaguje. Osvetlenie je realizované pomocou infra LED diódy. Fototranzistory sú zapojené ako emitorové sledovače. Následne je signál vedený do komparátora. Druhá úroveň komparátora je napájaná z odporového deliča. Na snímanie v bludisku sú použité bočné senzory. Jeden na lavej strane a jeden na pravej. Tieto sú realizované ako zapojenie infra LEDky a snímača modulovaného signálu SFH 5110. LED diódy sú napájané striedavým signálom o frekvencii 36kHz. Ako zdroj frekvencie je mikroprocesor. Napájanie snímačov je vyfiltrované kondenzátormi. Výstupná úroveň je logická nula alebo jednotka, podľa prítomnosti modulovaného svetelného toku.
Ovládanie je realizované pomocou mikroprocesora rodiny Atmel AT89C2051. Tento je ovládaný krištálom o frekvencii 12 MHz. Zapojenie krištáľu a signálu reset je štandardné. Päť portov je použitých ako vstupných a to pre spínač nárazníka, bočné senzory SFH a výstup komparátorov zo senzorov pre čiaru. Desať portov je použitých ako výstupných. Dva sú použité ako zdroj striedavého signálu s požadovanou frekvenciou pre dve LED diódy do bočných senzorov. Ďalších osem je použitých na ovládanie krokových motorov a to pre jeden štyri porty. Každý z týchto signálov je vedený do dvojice tranzistorov, ktoré sú zapojené ako dvojstupňový spínač. Pre každú cievku motora existuje takáto dvojica tranzistorov. Cievka je priamo spínaná koncovým tranzistorom. Ku každej cievke je zapojená ochranná dióda.
Výber a napájanie jednotlivých LED diód je realizované cez spínače, lebo pre jednotlivé disciplíny nie sú vždy všetky potrebné.
Napájanie je realizované zo šiestich akumulátorových článkov typu AA. Zapojené sú do série, čiže celkové napájanie je 9V. Tieto sú použité pre napájanie motorov. Napájanie mikroprocesora a pomocných obvodov je realizované cez usmerňovač 78L05. Tento je zapojený štandardne.
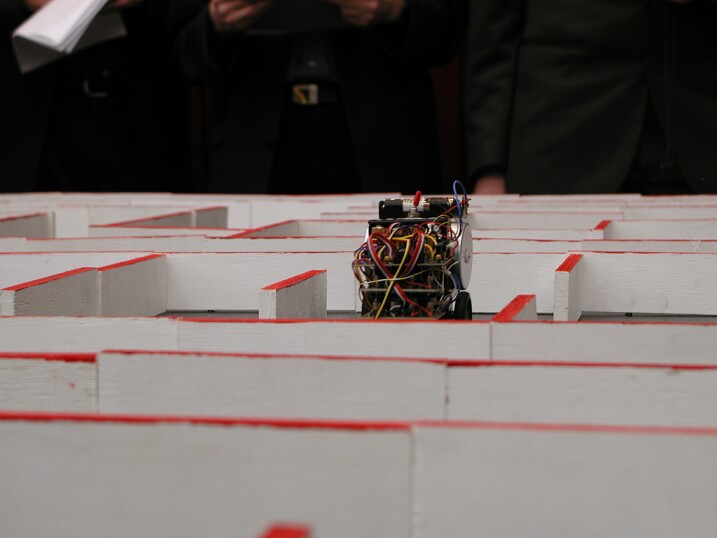
Pri pohybe po čiare program vyhodnocuje hodnotu získanú zo senzorov na čiaru a podľa toho riadi príslušné motory. Pri prerušení čiary si pamätá posledných pár krokov aby sa dokázal vyrovnať ak je čiara krivo zakončená. Nastupuje algoritmus vyhľadávania, robot sa striedavo otáča vpravo a vľavo. Ak je v ceste prekážka, robot ju zaregistruje pomocou nárazníka. Pomocou bočného senzora vie ako má obísť prekážku.
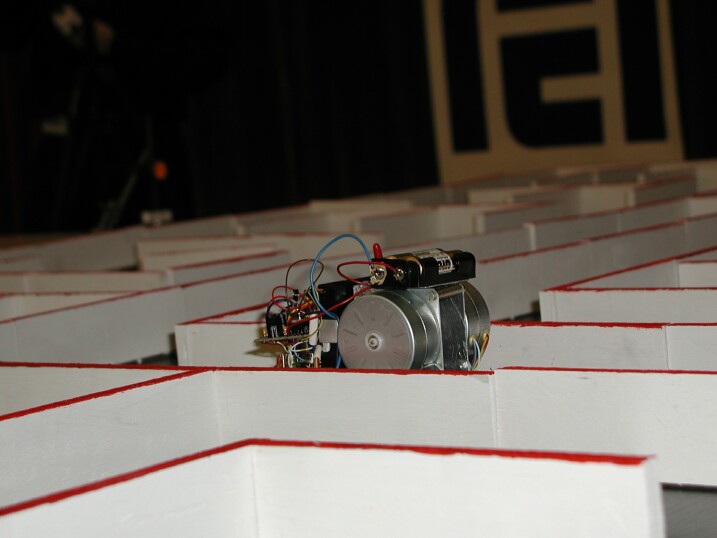
Pri pohybe v bludisku sa robot riadi ľavidlom ľavej ruky. Ak sa dá ísť doľava ide doľava. Ak nie a dá sa ísť rovno tak ide rovno. Ak nie tak začne cúvať. Ak sa počas cúvania dá ísť doprava tak ide tam. Ak sa dá ísť doľava spraví otočku doľava, zároveň testuje či sa nedá pokračovať v tomto prípade doľava. Ak hej tak ide tam. Centrovanie v uličkách bludiska nie je spravené.
Matej Jakuš
Kontakt:
Matej Jakuš, Nám. SNP 94, Slovenská Ľupča
Študent Fakulty elektrotechniky a informatiky, špecializácie elektronika v Bratislave.
![]()

© 2002 Richard Balogh
Posledná zmena: 19. septembra 2001.