Zápas dvoch robotov v ringu.

Robotické MiniSumo je zápas dvoch robotov o panstvo nad ringom. Ring je drevený kruh čiernej farby s bielym okrajom. Robot, ktorý vytlačí svojho súpera z ringu zvíťazí. Roboty súťažia v hmotnostnej kategórii do 500 g, rozmery sú obmedzené na 10 x 10 cm. Robot musí byť po umiestnení do ringu celkom samostatný a jeho autor ho nesmie ovplyvňovať.
Zápas dvoch robotov v ringu.
Ak si prinesiete svojho robota, napríklad z Lega, môžete ho skúsiť postaviť proti nášmu šampiónovi. Okrem toho bude k dispozícii mobilný robot, ktorý má dostatok senzorov na to, aby sa mohol po povrchu ringu pohybovať a zdetekovať súpera. Bude možnosť vyskúšať si ako sa tvorí riadiaci program pre takéhoto robota a overiť si ho priamo na výstave.
Podrobnejšie informácie o pravidlách...
Podrobnejšie informácie o robotovi...
Namiesto živého zápasníka použijeme robota BoeBot od firmy Parallax. Napájaný je tužkovými batériami, má dva jednosmerné motorčeky a riadiacu jednotku programovateľnú v jazyku BasicStamp.
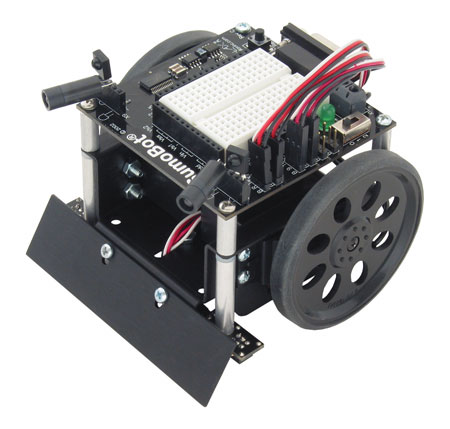
Robot SumoBot firmy Parallax.
Záujemci o podrobnejší popis robota si môžu zo stránok výrobcu stiahnuť a naštudovať:
Jeden z predvádzaných robotov bude z LEGA. Dôvod je zrejmý -- mnohí majú LEGO doma, nájde sa aj prakticky na každej škole, takže by nemal byť problém v zostavení a naprogramovaní vlastného zápasníka.
Na výstavisku bude k dispozícii naprogramovaná riadiaca jednotka RCX, ku ktorej treba pripojiť dva motorčeky a senzor a zostrojiť vhodného robota.
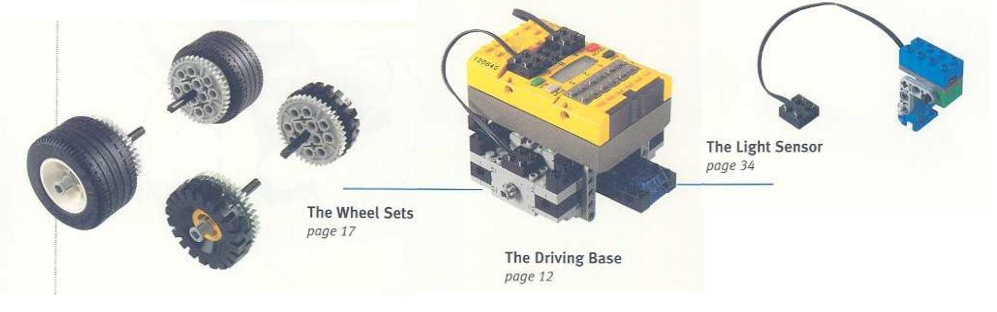
Roverbot zo stavebnice LEGO Mindstorms.
Tí, ktorí nemajú vlastné LEGO, môžu skúsiť naprogramovať toho nášho. Robota môžete programovať buď priamo v grafickom jazyku, ktorý je súčasťou stavebnice.
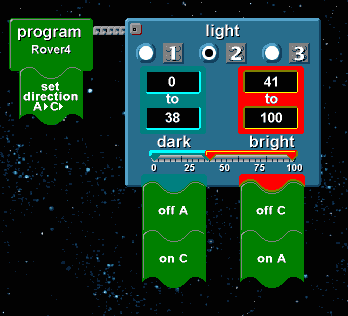
Príklad program pre Robota.
Pre pokročilých ale odporúčame programovať v niektorom bežnom jazyku, napríklad C-čku. Vhodný kompilátor pre RCX kocku je napr. NQC, ktorý sa dá stiahnuť tuto.
|
© 2006 Robotika.SK
Ilkovičova 3, 812 19 Bratislava, tel. +421 - 2 - 602 91 411.
Posledná zmena: 1. októbra 2006. 22:09:12.
Zodpovedný človek: Richard Balogh.