

 PHP Version 8.1.30 |
| System | Linux andyserver 5.10.0-33-amd64 #1 SMP Debian 5.10.226-1 (2024-10-03) x86_64 |
| Build Date | Sep 27 2024 04:10:31 |
| Build System | Linux |
| Server API | Apache 2.0 Handler |
| Virtual Directory Support | disabled |
| Configuration File (php.ini) Path | /etc/php/8.1/apache2 |
| Loaded Configuration File | /etc/php/8.1/apache2/php.ini |
| Scan this dir for additional .ini files | /etc/php/8.1/apache2/conf.d |
| Additional .ini files parsed | /etc/php/8.1/apache2/conf.d/10-mysqlnd.ini, /etc/php/8.1/apache2/conf.d/10-opcache.ini, /etc/php/8.1/apache2/conf.d/10-pdo.ini, /etc/php/8.1/apache2/conf.d/15-xml.ini, /etc/php/8.1/apache2/conf.d/20-calendar.ini, /etc/php/8.1/apache2/conf.d/20-ctype.ini, /etc/php/8.1/apache2/conf.d/20-curl.ini, /etc/php/8.1/apache2/conf.d/20-dom.ini, /etc/php/8.1/apache2/conf.d/20-exif.ini, /etc/php/8.1/apache2/conf.d/20-ffi.ini, /etc/php/8.1/apache2/conf.d/20-fileinfo.ini, /etc/php/8.1/apache2/conf.d/20-ftp.ini, /etc/php/8.1/apache2/conf.d/20-gd.ini, /etc/php/8.1/apache2/conf.d/20-gettext.ini, /etc/php/8.1/apache2/conf.d/20-iconv.ini, /etc/php/8.1/apache2/conf.d/20-mbstring.ini, /etc/php/8.1/apache2/conf.d/20-mysqli.ini, /etc/php/8.1/apache2/conf.d/20-pdo_mysql.ini, /etc/php/8.1/apache2/conf.d/20-phar.ini, /etc/php/8.1/apache2/conf.d/20-posix.ini, /etc/php/8.1/apache2/conf.d/20-readline.ini, /etc/php/8.1/apache2/conf.d/20-shmop.ini, /etc/php/8.1/apache2/conf.d/20-simplexml.ini, /etc/php/8.1/apache2/conf.d/20-sockets.ini, /etc/php/8.1/apache2/conf.d/20-sysvmsg.ini, /etc/php/8.1/apache2/conf.d/20-sysvsem.ini, /etc/php/8.1/apache2/conf.d/20-sysvshm.ini, /etc/php/8.1/apache2/conf.d/20-tokenizer.ini, /etc/php/8.1/apache2/conf.d/20-xmlreader.ini, /etc/php/8.1/apache2/conf.d/20-xmlwriter.ini, /etc/php/8.1/apache2/conf.d/20-xsl.ini, /etc/php/8.1/apache2/conf.d/20-zip.ini |
| PHP API | 20210902 |
| PHP Extension | 20210902 |
| Zend Extension | 420210902 |
| Zend Extension Build | API420210902,NTS |
| PHP Extension Build | API20210902,NTS |
| Debug Build | no |
| Thread Safety | disabled |
| Zend Signal Handling | enabled |
| Zend Memory Manager | enabled |
| Zend Multibyte Support | provided by mbstring |
| Zend Max Execution Timers | disabled |
| IPv6 Support | enabled |
| DTrace Support | available, disabled |
| Registered PHP Streams | https, ftps, compress.zlib, php, file, glob, data, http, ftp, phar, zip |
| Registered Stream Socket Transports | tcp, udp, unix, udg, ssl, tls, tlsv1.0, tlsv1.1, tlsv1.2, tlsv1.3 |
| Registered Stream Filters | zlib.*, string.rot13, string.toupper, string.tolower, convert.*, consumed, dechunk, convert.iconv.* |
 This program makes use of the Zend Scripting Language Engine:
This program makes use of the Zend Scripting Language Engine:Zend Engine v4.1.30, Copyright (c) Zend Technologies with Zend OPcache v8.1.30, Copyright (c), by Zend Technologies |
Configuration
apache2handler
| Apache Version | Apache/2.4.62 (Debian) |
| Apache API Version | 20120211 |
| Server Administrator | serveradmin@microstep-mis.sk |
| Hostname:Port | robotika.sk:0 |
| User/Group | www-data(33)/33 |
| Max Requests | Per Child: 0 - Keep Alive: on - Max Per Connection: 100 |
| Timeouts | Connection: 300 - Keep-Alive: 5 |
| Virtual Server | Yes |
| Server Root | /etc/apache2 |
| Loaded Modules | core mod_so mod_watchdog http_core mod_log_config mod_logio mod_version mod_unixd mod_access_compat mod_alias mod_auth_basic mod_authn_core mod_authn_file mod_authz_core mod_authz_groupfile mod_authz_host mod_authz_user mod_autoindex mod_cgi mod_deflate mod_dir mod_env mod_filter mod_mime prefork mod_negotiation mod_php mod_reqtimeout mod_setenvif mod_socache_shmcb mod_ssl mod_status |
| Directive | Local Value | Master Value |
|---|---|---|
| engine | On | On |
| last_modified | Off | Off |
| xbithack | Off | Off |
Apache Environment
| Variable | Value |
|---|---|
| HTTPS | on |
| SSL_TLS_SNI | robotika.sk |
| HTTP_ACCEPT | */* |
| HTTP_USER_AGENT | Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com) |
| HTTP_ACCEPT_ENCODING | gzip, br, zstd, deflate |
| HTTP_HOST | robotika.sk |
| PATH | /usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin |
| SERVER_SIGNATURE | <address>Apache/2.4.62 (Debian) Server at robotika.sk Port 443</address> |
| SERVER_SOFTWARE | Apache/2.4.62 (Debian) |
| SERVER_NAME | robotika.sk |
| SERVER_ADDR | 10.101.71.55 |
| SERVER_PORT | 443 |
| REMOTE_ADDR | 216.73.216.252 |
| DOCUMENT_ROOT | /var/www/vhosts/www.robotika.sk/html |
| REQUEST_SCHEME | https |
| CONTEXT_PREFIX | no value |
| CONTEXT_DOCUMENT_ROOT | /var/www/vhosts/www.robotika.sk/html |
| SERVER_ADMIN | serveradmin@microstep-mis.sk |
| SCRIPT_FILENAME | /var/www/vhosts/www.robotika.sk/html/contest/poradna.php |
| REMOTE_PORT | 26151 |
| GATEWAY_INTERFACE | CGI/1.1 |
| SERVER_PROTOCOL | HTTP/1.1 |
| REQUEST_METHOD | GET |
| QUERY_STRING | no value |
| REQUEST_URI | /contest/poradna.php |
| SCRIPT_NAME | /contest/poradna.php |
HTTP Headers Information
| HTTP Request Headers | |
|---|---|
| HTTP Request | GET /contest/poradna.php HTTP/1.1 |
| accept | */* |
| user-agent | Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com) |
| accept-encoding | gzip, br, zstd, deflate |
| host | robotika.sk |
| HTTP Response Headers | |
calendar
| Calendar support | enabled |
Core
| PHP Version | 8.1.30 |
| Directive | Local Value | Master Value |
|---|---|---|
| allow_url_fopen | On | On |
| allow_url_include | Off | Off |
| arg_separator.input | & | & |
| arg_separator.output | & | & |
| auto_append_file | no value | no value |
| auto_globals_jit | On | On |
| auto_prepend_file | no value | no value |
| browscap | no value | no value |
| default_charset | UTF-8 | UTF-8 |
| default_mimetype | text/html | text/html |
| disable_classes | no value | no value |
| disable_functions | no value | no value |
| display_errors | Off | Off |
| display_startup_errors | Off | Off |
| doc_root | no value | no value |
| docref_ext | no value | no value |
| docref_root | no value | no value |
| enable_dl | Off | Off |
| enable_post_data_reading | On | On |
| error_append_string | no value | no value |
| error_log | no value | no value |
| error_prepend_string | no value | no value |
| error_reporting | 22527 | 22527 |
| expose_php | Off | Off |
| extension_dir | /usr/lib/php/20210902 | /usr/lib/php/20210902 |
| fiber.stack_size | no value | no value |
| file_uploads | On | On |
| hard_timeout | 2 | 2 |
| highlight.comment | #FF8000 | #FF8000 |
| highlight.default | #0000BB | #0000BB |
| highlight.html | #000000 | #000000 |
| highlight.keyword | #007700 | #007700 |
| highlight.string | #DD0000 | #DD0000 |
| html_errors | On | On |
| ignore_repeated_errors | Off | Off |
| ignore_repeated_source | Off | Off |
| ignore_user_abort | Off | Off |
| implicit_flush | Off | Off |
| include_path | .:/usr/share/php | .:/usr/share/php |
| input_encoding | no value | no value |
| internal_encoding | no value | no value |
| log_errors | On | On |
| mail.add_x_header | Off | Off |
| mail.force_extra_parameters | no value | no value |
| mail.log | no value | no value |
| max_execution_time | 30 | 30 |
| max_file_uploads | 20 | 20 |
| max_input_nesting_level | 64 | 64 |
| max_input_time | 60 | 60 |
| max_input_vars | 1000 | 1000 |
| max_multipart_body_parts | -1 | -1 |
| memory_limit | 128M | 128M |
| open_basedir | no value | no value |
| output_buffering | 4096 | 4096 |
| output_encoding | no value | no value |
| output_handler | no value | no value |
| post_max_size | 8M | 8M |
| precision | 14 | 14 |
| realpath_cache_size | 4096K | 4096K |
| realpath_cache_ttl | 120 | 120 |
| register_argc_argv | Off | Off |
| report_memleaks | On | On |
| report_zend_debug | Off | Off |
| request_order | GP | GP |
| sendmail_from | no value | no value |
| sendmail_path | /usr/sbin/sendmail -t -i | /usr/sbin/sendmail -t -i |
| serialize_precision | -1 | -1 |
| short_open_tag | Off | Off |
| SMTP | localhost | localhost |
| smtp_port | 25 | 25 |
| sys_temp_dir | no value | no value |
| syslog.facility | LOG_USER | LOG_USER |
| syslog.filter | no-ctrl | no-ctrl |
| syslog.ident | php | php |
| unserialize_callback_func | no value | no value |
| upload_max_filesize | 2M | 2M |
| upload_tmp_dir | no value | no value |
| user_dir | no value | no value |
| user_ini.cache_ttl | 300 | 300 |
| user_ini.filename | .user.ini | .user.ini |
| variables_order | GPCS | GPCS |
| xmlrpc_error_number | 0 | 0 |
| xmlrpc_errors | Off | Off |
| zend.assertions | -1 | -1 |
| zend.detect_unicode | On | On |
| zend.enable_gc | On | On |
| zend.exception_ignore_args | On | On |
| zend.exception_string_param_max_len | 0 | 0 |
| zend.multibyte | Off | Off |
| zend.script_encoding | no value | no value |
| zend.signal_check | Off | Off |
ctype
| ctype functions | enabled |
curl
| cURL support | enabled |
| cURL Information | 7.74.0 |
| Age | 7 |
| Features | |
| AsynchDNS | Yes |
| CharConv | No |
| Debug | No |
| GSS-Negotiate | No |
| IDN | Yes |
| IPv6 | Yes |
| krb4 | No |
| Largefile | Yes |
| libz | Yes |
| NTLM | Yes |
| NTLMWB | Yes |
| SPNEGO | Yes |
| SSL | Yes |
| SSPI | No |
| TLS-SRP | Yes |
| HTTP2 | Yes |
| GSSAPI | Yes |
| KERBEROS5 | Yes |
| UNIX_SOCKETS | Yes |
| PSL | Yes |
| HTTPS_PROXY | Yes |
| MULTI_SSL | No |
| BROTLI | Yes |
| Protocols | dict, file, ftp, ftps, gopher, http, https, imap, imaps, ldap, ldaps, mqtt, pop3, pop3s, rtmp, rtsp, scp, sftp, smb, smbs, smtp, smtps, telnet, tftp |
| Host | x86_64-pc-linux-gnu |
| SSL Version | OpenSSL/1.1.1w |
| ZLib Version | 1.2.11 |
| libSSH Version | libssh2/1.9.0 |
| Directive | Local Value | Master Value |
|---|---|---|
| curl.cainfo | no value | no value |
date
| date/time support | enabled |
| timelib version | 2021.19 |
| "Olson" Timezone Database Version | 0.system |
| Timezone Database | internal |
| Default timezone | Europe/Berlin |
| Directive | Local Value | Master Value |
|---|---|---|
| date.default_latitude | 31.7667 | 31.7667 |
| date.default_longitude | 35.2333 | 35.2333 |
| date.sunrise_zenith | 90.833333 | 90.833333 |
| date.sunset_zenith | 90.833333 | 90.833333 |
| date.timezone | no value | no value |
dom
| DOM/XML | enabled |
| DOM/XML API Version | 20031129 |
| libxml Version | 2.9.14 |
| HTML Support | enabled |
| XPath Support | enabled |
| XPointer Support | enabled |
| Schema Support | enabled |
| RelaxNG Support | enabled |
exif
| EXIF Support | enabled |
| Supported EXIF Version | 0220 |
| Supported filetypes | JPEG, TIFF |
| Multibyte decoding support using mbstring | enabled |
| Extended EXIF tag formats | Canon, Casio, Fujifilm, Nikon, Olympus, Samsung, Panasonic, DJI, Sony, Pentax, Minolta, Sigma, Foveon, Kyocera, Ricoh, AGFA, Epson |
| Directive | Local Value | Master Value |
|---|---|---|
| exif.decode_jis_intel | JIS | JIS |
| exif.decode_jis_motorola | JIS | JIS |
| exif.decode_unicode_intel | UCS-2LE | UCS-2LE |
| exif.decode_unicode_motorola | UCS-2BE | UCS-2BE |
| exif.encode_jis | no value | no value |
| exif.encode_unicode | ISO-8859-15 | ISO-8859-15 |
FFI
| FFI support | enabled |
|---|
| Directive | Local Value | Master Value |
|---|---|---|
| ffi.enable | preload | preload |
| ffi.preload | no value | no value |
fileinfo
| fileinfo support | enabled |
| libmagic | 540 |
filter
| Input Validation and Filtering | enabled |
| Directive | Local Value | Master Value |
|---|---|---|
| filter.default | unsafe_raw | unsafe_raw |
| filter.default_flags | no value | no value |
ftp
| FTP support | enabled |
| FTPS support | enabled |
gd
| GD Support | enabled |
| GD headers Version | 2.3.3 |
| GD library Version | 2.3.3 |
| FreeType Support | enabled |
| FreeType Linkage | with freetype |
| GIF Read Support | enabled |
| GIF Create Support | enabled |
| JPEG Support | enabled |
| PNG Support | enabled |
| WBMP Support | enabled |
| XPM Support | enabled |
| XBM Support | enabled |
| WebP Support | enabled |
| BMP Support | enabled |
| AVIF Support | enabled |
| TGA Read Support | enabled |
| Directive | Local Value | Master Value |
|---|---|---|
| gd.jpeg_ignore_warning | 1 | 1 |
gettext
| GetText Support | enabled |
hash
| hash support | enabled |
| Hashing Engines | md2 md4 md5 sha1 sha224 sha256 sha384 sha512/224 sha512/256 sha512 sha3-224 sha3-256 sha3-384 sha3-512 ripemd128 ripemd160 ripemd256 ripemd320 whirlpool tiger128,3 tiger160,3 tiger192,3 tiger128,4 tiger160,4 tiger192,4 snefru snefru256 gost gost-crypto adler32 crc32 crc32b crc32c fnv132 fnv1a32 fnv164 fnv1a64 joaat murmur3a murmur3c murmur3f xxh32 xxh64 xxh3 xxh128 haval128,3 haval160,3 haval192,3 haval224,3 haval256,3 haval128,4 haval160,4 haval192,4 haval224,4 haval256,4 haval128,5 haval160,5 haval192,5 haval224,5 haval256,5 |
| MHASH support | Enabled |
| MHASH API Version | Emulated Support |
iconv
| iconv support | enabled |
| iconv implementation | glibc |
| iconv library version | 2.31 |
| Directive | Local Value | Master Value |
|---|---|---|
| iconv.input_encoding | no value | no value |
| iconv.internal_encoding | no value | no value |
| iconv.output_encoding | no value | no value |
json
| json support | enabled |
libxml
| libXML support | active |
| libXML Compiled Version | 2.9.14 |
| libXML Loaded Version | 20910 |
| libXML streams | enabled |
mbstring
| Multibyte Support | enabled |
| Multibyte string engine | libmbfl |
| HTTP input encoding translation | disabled |
| libmbfl version | 1.3.2 |
| mbstring extension makes use of "streamable kanji code filter and converter", which is distributed under the GNU Lesser General Public License version 2.1. |
|---|
| Multibyte (japanese) regex support | enabled |
| Multibyte regex (oniguruma) version | 6.9.6 |
| Directive | Local Value | Master Value |
|---|---|---|
| mbstring.detect_order | no value | no value |
| mbstring.encoding_translation | Off | Off |
| mbstring.http_input | no value | no value |
| mbstring.http_output | no value | no value |
| mbstring.http_output_conv_mimetypes | ^(text/|application/xhtml\+xml) | ^(text/|application/xhtml\+xml) |
| mbstring.internal_encoding | no value | no value |
| mbstring.language | neutral | neutral |
| mbstring.regex_retry_limit | 1000000 | 1000000 |
| mbstring.regex_stack_limit | 100000 | 100000 |
| mbstring.strict_detection | Off | Off |
| mbstring.substitute_character | no value | no value |
mysqli
| MysqlI Support | enabled |
|---|---|
| Client API library version | mysqlnd 8.1.30 |
| Active Persistent Links | 0 |
| Inactive Persistent Links | 0 |
| Active Links | 0 |
| Directive | Local Value | Master Value |
|---|---|---|
| mysqli.allow_local_infile | Off | Off |
| mysqli.allow_persistent | On | On |
| mysqli.default_host | no value | no value |
| mysqli.default_port | 3306 | 3306 |
| mysqli.default_pw | no value | no value |
| mysqli.default_socket | /var/run/mysqld/mysqld.sock | /var/run/mysqld/mysqld.sock |
| mysqli.default_user | no value | no value |
| mysqli.local_infile_directory | no value | no value |
| mysqli.max_links | Unlimited | Unlimited |
| mysqli.max_persistent | Unlimited | Unlimited |
| mysqli.reconnect | Off | Off |
| mysqli.rollback_on_cached_plink | Off | Off |
mysqlnd
| mysqlnd | enabled |
|---|---|
| Version | mysqlnd 8.1.30 |
| Compression | supported |
| core SSL | supported |
| extended SSL | supported |
| Command buffer size | 4096 |
| Read buffer size | 32768 |
| Read timeout | 86400 |
| Collecting statistics | Yes |
| Collecting memory statistics | No |
| Tracing | n/a |
| Loaded plugins | mysqlnd,debug_trace,auth_plugin_mysql_native_password,auth_plugin_mysql_clear_password,auth_plugin_caching_sha2_password,auth_plugin_sha256_password |
| API Extensions | mysqli,pdo_mysql |
openssl
| OpenSSL support | enabled |
| OpenSSL Library Version | OpenSSL 1.1.1w 11 Sep 2023 |
| OpenSSL Header Version | OpenSSL 1.1.1w 11 Sep 2023 |
| Openssl default config | /usr/lib/ssl/openssl.cnf |
| Directive | Local Value | Master Value |
|---|---|---|
| openssl.cafile | no value | no value |
| openssl.capath | no value | no value |
pcre
| PCRE (Perl Compatible Regular Expressions) Support | enabled |
| PCRE Library Version | 10.40 2022-04-14 |
| PCRE Unicode Version | 14.0.0 |
| PCRE JIT Support | enabled |
| PCRE JIT Target | x86 64bit (little endian + unaligned) |
| Directive | Local Value | Master Value |
|---|---|---|
| pcre.backtrack_limit | 1000000 | 1000000 |
| pcre.jit | 1 | 1 |
| pcre.recursion_limit | 100000 | 100000 |
PDO
| PDO support | enabled |
|---|---|
| PDO drivers | mysql |
pdo_mysql
| PDO Driver for MySQL | enabled |
|---|---|
| Client API version | mysqlnd 8.1.30 |
| Directive | Local Value | Master Value |
|---|---|---|
| pdo_mysql.default_socket | /var/run/mysqld/mysqld.sock | /var/run/mysqld/mysqld.sock |
Phar
| Phar: PHP Archive support | enabled |
|---|---|
| Phar API version | 1.1.1 |
| Phar-based phar archives | enabled |
| Tar-based phar archives | enabled |
| ZIP-based phar archives | enabled |
| gzip compression | enabled |
| bzip2 compression | disabled (install ext/bz2) |
| Native OpenSSL support | enabled |
|
Phar based on pear/PHP_Archive, original concept by Davey Shafik. Phar fully realized by Gregory Beaver and Marcus Boerger. Portions of tar implementation Copyright (c) 2003-2009 Tim Kientzle. |
| Directive | Local Value | Master Value |
|---|---|---|
| phar.cache_list | no value | no value |
| phar.readonly | On | On |
| phar.require_hash | On | On |
posix
| POSIX support | enabled |
readline
| Readline Support | enabled |
|---|---|
| Readline library | EditLine wrapper |
| Directive | Local Value | Master Value |
|---|---|---|
| cli.pager | no value | no value |
| cli.prompt | \b \> | \b \> |
Reflection
| Reflection | enabled |
session
| Session Support | enabled |
| Registered save handlers | files user |
| Registered serializer handlers | php_serialize php php_binary |
| Directive | Local Value | Master Value |
|---|---|---|
| session.auto_start | Off | Off |
| session.cache_expire | 180 | 180 |
| session.cache_limiter | nocache | nocache |
| session.cookie_domain | no value | no value |
| session.cookie_httponly | no value | no value |
| session.cookie_lifetime | 0 | 0 |
| session.cookie_path | / | / |
| session.cookie_samesite | no value | no value |
| session.cookie_secure | 0 | 0 |
| session.gc_divisor | 1000 | 1000 |
| session.gc_maxlifetime | 1440 | 1440 |
| session.gc_probability | 0 | 0 |
| session.lazy_write | On | On |
| session.name | PHPSESSID | PHPSESSID |
| session.referer_check | no value | no value |
| session.save_handler | files | files |
| session.save_path | /var/lib/php/sessions | /var/lib/php/sessions |
| session.serialize_handler | php | php |
| session.sid_bits_per_character | 5 | 5 |
| session.sid_length | 26 | 26 |
| session.upload_progress.cleanup | On | On |
| session.upload_progress.enabled | On | On |
| session.upload_progress.freq | 1% | 1% |
| session.upload_progress.min_freq | 1 | 1 |
| session.upload_progress.name | PHP_SESSION_UPLOAD_PROGRESS | PHP_SESSION_UPLOAD_PROGRESS |
| session.upload_progress.prefix | upload_progress_ | upload_progress_ |
| session.use_cookies | 1 | 1 |
| session.use_only_cookies | 1 | 1 |
| session.use_strict_mode | 0 | 0 |
| session.use_trans_sid | 0 | 0 |
shmop
| shmop support | enabled |
SimpleXML
| SimpleXML support | enabled |
| Schema support | enabled |
sockets
| Sockets Support | enabled |
sodium
| sodium support | enabled |
|---|---|
| libsodium headers version | 1.0.18 |
| libsodium library version | 1.0.18 |
SPL
| SPL support | enabled |
|---|---|
| Interfaces | OuterIterator, RecursiveIterator, SeekableIterator, SplObserver, SplSubject |
| Classes | AppendIterator, ArrayIterator, ArrayObject, BadFunctionCallException, BadMethodCallException, CachingIterator, CallbackFilterIterator, DirectoryIterator, DomainException, EmptyIterator, FilesystemIterator, FilterIterator, GlobIterator, InfiniteIterator, InvalidArgumentException, IteratorIterator, LengthException, LimitIterator, LogicException, MultipleIterator, NoRewindIterator, OutOfBoundsException, OutOfRangeException, OverflowException, ParentIterator, RangeException, RecursiveArrayIterator, RecursiveCachingIterator, RecursiveCallbackFilterIterator, RecursiveDirectoryIterator, RecursiveFilterIterator, RecursiveIteratorIterator, RecursiveRegexIterator, RecursiveTreeIterator, RegexIterator, RuntimeException, SplDoublyLinkedList, SplFileInfo, SplFileObject, SplFixedArray, SplHeap, SplMinHeap, SplMaxHeap, SplObjectStorage, SplPriorityQueue, SplQueue, SplStack, SplTempFileObject, UnderflowException, UnexpectedValueException |
standard
| Dynamic Library Support | enabled |
| Path to sendmail | /usr/sbin/sendmail -t -i |
| Directive | Local Value | Master Value |
|---|---|---|
| assert.active | On | On |
| assert.bail | Off | Off |
| assert.callback | no value | no value |
| assert.exception | On | On |
| assert.warning | On | On |
| auto_detect_line_endings | Off | Off |
| default_socket_timeout | 60 | 60 |
| from | no value | no value |
| session.trans_sid_hosts | no value | no value |
| session.trans_sid_tags | a=href,area=href,frame=src,form= | a=href,area=href,frame=src,form= |
| unserialize_max_depth | 4096 | 4096 |
| url_rewriter.hosts | no value | no value |
| url_rewriter.tags | form= | form= |
| user_agent | no value | no value |
sysvmsg
| sysvmsg support | enabled |
sysvsem
| sysvsem support | enabled |
sysvshm
| sysvshm support | enabled |
tokenizer
| Tokenizer Support | enabled |
xml
| XML Support | active |
| XML Namespace Support | active |
| libxml2 Version | 2.9.14 |
xmlreader
| XMLReader | enabled |
xmlwriter
| XMLWriter | enabled |
xsl
| XSL | enabled |
| libxslt Version | 1.1.34 |
| libxslt compiled against libxml Version | 2.9.10 |
| EXSLT | enabled |
| libexslt Version | 1.1.34 |
Zend OPcache
| Opcode Caching | Up and Running |
| Optimization | Enabled |
| SHM Cache | Enabled |
| File Cache | Disabled |
| JIT | Disabled |
| Startup | OK |
| Shared memory model | mmap |
| Cache hits | 62908 |
| Cache misses | 431 |
| Used memory | 12392512 |
| Free memory | 121825216 |
| Wasted memory | 0 |
| Interned Strings Used memory | 4226344 |
| Interned Strings Free memory | 4162264 |
| Cached scripts | 431 |
| Cached keys | 691 |
| Max keys | 16229 |
| OOM restarts | 0 |
| Hash keys restarts | 0 |
| Manual restarts | 0 |
| Directive | Local Value | Master Value |
|---|---|---|
| opcache.blacklist_filename | no value | no value |
| opcache.consistency_checks | 0 | 0 |
| opcache.dups_fix | Off | Off |
| opcache.enable | On | On |
| opcache.enable_cli | Off | Off |
| opcache.enable_file_override | Off | Off |
| opcache.error_log | no value | no value |
| opcache.file_cache | no value | no value |
| opcache.file_cache_consistency_checks | On | On |
| opcache.file_cache_only | Off | Off |
| opcache.file_update_protection | 2 | 2 |
| opcache.force_restart_timeout | 180 | 180 |
| opcache.huge_code_pages | Off | Off |
| opcache.interned_strings_buffer | 8 | 8 |
| opcache.jit | no value | no value |
| opcache.jit_bisect_limit | 0 | 0 |
| opcache.jit_blacklist_root_trace | 16 | 16 |
| opcache.jit_blacklist_side_trace | 8 | 8 |
| opcache.jit_buffer_size | 0 | 0 |
| opcache.jit_debug | 0 | 0 |
| opcache.jit_hot_func | 127 | 127 |
| opcache.jit_hot_loop | 64 | 64 |
| opcache.jit_hot_return | 8 | 8 |
| opcache.jit_hot_side_exit | 8 | 8 |
| opcache.jit_max_exit_counters | 8192 | 8192 |
| opcache.jit_max_loop_unrolls | 8 | 8 |
| opcache.jit_max_polymorphic_calls | 2 | 2 |
| opcache.jit_max_recursive_calls | 2 | 2 |
| opcache.jit_max_recursive_returns | 2 | 2 |
| opcache.jit_max_root_traces | 1024 | 1024 |
| opcache.jit_max_side_traces | 128 | 128 |
| opcache.jit_prof_threshold | 0.005 | 0.005 |
| opcache.lockfile_path | /tmp | /tmp |
| opcache.log_verbosity_level | 1 | 1 |
| opcache.max_accelerated_files | 10000 | 10000 |
| opcache.max_file_size | 0 | 0 |
| opcache.max_wasted_percentage | 5 | 5 |
| opcache.memory_consumption | 128 | 128 |
| opcache.opt_debug_level | 0 | 0 |
| opcache.optimization_level | 0x7FFEBFFF | 0x7FFEBFFF |
| opcache.preferred_memory_model | no value | no value |
| opcache.preload | no value | no value |
| opcache.preload_user | no value | no value |
| opcache.protect_memory | Off | Off |
| opcache.record_warnings | Off | Off |
| opcache.restrict_api | no value | no value |
| opcache.revalidate_freq | 2 | 2 |
| opcache.revalidate_path | Off | Off |
| opcache.save_comments | On | On |
| opcache.use_cwd | On | On |
| opcache.validate_permission | Off | Off |
| opcache.validate_root | Off | Off |
| opcache.validate_timestamps | On | On |
zip
| Zip | enabled |
| Zip version | 1.19.5 |
| Libzip version | 1.7.3 |
| BZIP2 compression | Yes |
| XZ compression | No |
| ZSTD compression | No |
| AES-128 encryption | Yes |
| AES-192 encryption | Yes |
| AES-256 encryption | Yes |
zlib
| ZLib Support | enabled |
|---|---|
| Stream Wrapper | compress.zlib:// |
| Stream Filter | zlib.inflate, zlib.deflate |
| Compiled Version | 1.2.11 |
| Linked Version | 1.2.11 |
| Directive | Local Value | Master Value |
|---|---|---|
| zlib.output_compression | Off | Off |
| zlib.output_compression_level | -1 | -1 |
| zlib.output_handler | no value | no value |
Additional Modules
| Module Name |
|---|
Environment
| Variable | Value |
|---|---|
| LANGUAGE | en_US:en |
| APACHE_RUN_DIR | /var/run/apache2 |
| APACHE_PID_FILE | /var/run/apache2/apache2.pid |
| JOURNAL_STREAM | 8:12391 |
| PATH | /usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin |
| INVOCATION_ID | 870c5ad3da244421892cdb57223e8149 |
| APACHE_LOCK_DIR | /var/lock/apache2 |
| LANG | C |
| APACHE_RUN_USER | www-data |
| APACHE_RUN_GROUP | www-data |
| APACHE_LOG_DIR | /var/log/apache2 |
| PWD | / |
PHP Variables
| Variable | Value |
|---|---|
| $_SERVER['HTTPS'] | on |
| $_SERVER['SSL_TLS_SNI'] | robotika.sk |
| $_SERVER['HTTP_ACCEPT'] | */* |
| $_SERVER['HTTP_USER_AGENT'] | Mozilla/5.0 AppleWebKit/537.36 (KHTML, like Gecko; compatible; ClaudeBot/1.0; +claudebot@anthropic.com) |
| $_SERVER['HTTP_ACCEPT_ENCODING'] | gzip, br, zstd, deflate |
| $_SERVER['HTTP_HOST'] | robotika.sk |
| $_SERVER['PATH'] | /usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin |
| $_SERVER['SERVER_SIGNATURE'] | <address>Apache/2.4.62 (Debian) Server at robotika.sk Port 443</address> |
| $_SERVER['SERVER_SOFTWARE'] | Apache/2.4.62 (Debian) |
| $_SERVER['SERVER_NAME'] | robotika.sk |
| $_SERVER['SERVER_ADDR'] | 10.101.71.55 |
| $_SERVER['SERVER_PORT'] | 443 |
| $_SERVER['REMOTE_ADDR'] | 216.73.216.252 |
| $_SERVER['DOCUMENT_ROOT'] | /var/www/vhosts/www.robotika.sk/html |
| $_SERVER['REQUEST_SCHEME'] | https |
| $_SERVER['CONTEXT_PREFIX'] | no value |
| $_SERVER['CONTEXT_DOCUMENT_ROOT'] | /var/www/vhosts/www.robotika.sk/html |
| $_SERVER['SERVER_ADMIN'] | serveradmin@microstep-mis.sk |
| $_SERVER['SCRIPT_FILENAME'] | /var/www/vhosts/www.robotika.sk/html/contest/poradna.php |
| $_SERVER['REMOTE_PORT'] | 26151 |
| $_SERVER['GATEWAY_INTERFACE'] | CGI/1.1 |
| $_SERVER['SERVER_PROTOCOL'] | HTTP/1.1 |
| $_SERVER['REQUEST_METHOD'] | GET |
| $_SERVER['QUERY_STRING'] | no value |
| $_SERVER['REQUEST_URI'] | /contest/poradna.php |
| $_SERVER['SCRIPT_NAME'] | /contest/poradna.php |
| $_SERVER['PHP_SELF'] | /contest/poradna.php |
| $_SERVER['REQUEST_TIME_FLOAT'] | 1784092758.7393 |
| $_SERVER['REQUEST_TIME'] | 1784092758 |
PHP Credits
| PHP Group |
|---|
| Thies C. Arntzen, Stig Bakken, Shane Caraveo, Andi Gutmans, Rasmus Lerdorf, Sam Ruby, Sascha Schumann, Zeev Suraski, Jim Winstead, Andrei Zmievski |
| Language Design & Concept |
|---|
| Andi Gutmans, Rasmus Lerdorf, Zeev Suraski, Marcus Boerger |
| PHP Authors | |
|---|---|
| Contribution | Authors |
| Zend Scripting Language Engine | Andi Gutmans, Zeev Suraski, Stanislav Malyshev, Marcus Boerger, Dmitry Stogov, Xinchen Hui, Nikita Popov |
| Extension Module API | Andi Gutmans, Zeev Suraski, Andrei Zmievski |
| UNIX Build and Modularization | Stig Bakken, Sascha Schumann, Jani Taskinen, Peter Kokot |
| Windows Support | Shane Caraveo, Zeev Suraski, Wez Furlong, Pierre-Alain Joye, Anatol Belski, Kalle Sommer Nielsen |
| Server API (SAPI) Abstraction Layer | Andi Gutmans, Shane Caraveo, Zeev Suraski |
| Streams Abstraction Layer | Wez Furlong, Sara Golemon |
| PHP Data Objects Layer | Wez Furlong, Marcus Boerger, Sterling Hughes, George Schlossnagle, Ilia Alshanetsky |
| Output Handler | Zeev Suraski, Thies C. Arntzen, Marcus Boerger, Michael Wallner |
| Consistent 64 bit support | Anthony Ferrara, Anatol Belski |
| SAPI Modules | |
|---|---|
| Contribution | Authors |
| Apache 2.0 Handler | Ian Holsman, Justin Erenkrantz (based on Apache 2.0 Filter code) |
| CGI / FastCGI | Rasmus Lerdorf, Stig Bakken, Shane Caraveo, Dmitry Stogov |
| CLI | Edin Kadribasic, Marcus Boerger, Johannes Schlueter, Moriyoshi Koizumi, Xinchen Hui |
| Embed | Edin Kadribasic |
| FastCGI Process Manager | Andrei Nigmatulin, dreamcat4, Antony Dovgal, Jerome Loyet |
| litespeed | George Wang |
| phpdbg | Felipe Pena, Joe Watkins, Bob Weinand |
| Module Authors | |
|---|---|
| Module | Authors |
| BC Math | Andi Gutmans |
| Bzip2 | Sterling Hughes |
| Calendar | Shane Caraveo, Colin Viebrock, Hartmut Holzgraefe, Wez Furlong |
| COM and .Net | Wez Furlong |
| ctype | Hartmut Holzgraefe |
| cURL | Sterling Hughes |
| Date/Time Support | Derick Rethans |
| DB-LIB (MS SQL, Sybase) | Wez Furlong, Frank M. Kromann, Adam Baratz |
| DBA | Sascha Schumann, Marcus Boerger |
| DOM | Christian Stocker, Rob Richards, Marcus Boerger |
| enchant | Pierre-Alain Joye, Ilia Alshanetsky |
| EXIF | Rasmus Lerdorf, Marcus Boerger |
| FFI | Dmitry Stogov |
| fileinfo | Ilia Alshanetsky, Pierre Alain Joye, Scott MacVicar, Derick Rethans, Anatol Belski |
| Firebird driver for PDO | Ard Biesheuvel |
| FTP | Stefan Esser, Andrew Skalski |
| GD imaging | Rasmus Lerdorf, Stig Bakken, Jim Winstead, Jouni Ahto, Ilia Alshanetsky, Pierre-Alain Joye, Marcus Boerger, Mark Randall |
| GetText | Alex Plotnick |
| GNU GMP support | Stanislav Malyshev |
| Iconv | Rui Hirokawa, Stig Bakken, Moriyoshi Koizumi |
| IMAP | Rex Logan, Mark Musone, Brian Wang, Kaj-Michael Lang, Antoni Pamies Olive, Rasmus Lerdorf, Andrew Skalski, Chuck Hagenbuch, Daniel R Kalowsky |
| Input Filter | Rasmus Lerdorf, Derick Rethans, Pierre-Alain Joye, Ilia Alshanetsky |
| Internationalization | Ed Batutis, Vladimir Iordanov, Dmitry Lakhtyuk, Stanislav Malyshev, Vadim Savchuk, Kirti Velankar |
| JSON | Jakub Zelenka, Omar Kilani, Scott MacVicar |
| LDAP | Amitay Isaacs, Eric Warnke, Rasmus Lerdorf, Gerrit Thomson, Stig Venaas |
| LIBXML | Christian Stocker, Rob Richards, Marcus Boerger, Wez Furlong, Shane Caraveo |
| Multibyte String Functions | Tsukada Takuya, Rui Hirokawa |
| MySQL driver for PDO | George Schlossnagle, Wez Furlong, Ilia Alshanetsky, Johannes Schlueter |
| MySQLi | Zak Greant, Georg Richter, Andrey Hristov, Ulf Wendel |
| MySQLnd | Andrey Hristov, Ulf Wendel, Georg Richter, Johannes SchlĂźter |
| OCI8 | Stig Bakken, Thies C. Arntzen, Andy Sautins, David Benson, Maxim Maletsky, Harald Radi, Antony Dovgal, Andi Gutmans, Wez Furlong, Christopher Jones, Oracle Corporation |
| ODBC driver for PDO | Wez Furlong |
| ODBC | Stig Bakken, Andreas Karajannis, Frank M. Kromann, Daniel R. Kalowsky |
| Opcache | Andi Gutmans, Zeev Suraski, Stanislav Malyshev, Dmitry Stogov, Xinchen Hui |
| OpenSSL | Stig Venaas, Wez Furlong, Sascha Kettler, Scott MacVicar, Eliot Lear |
| Oracle (OCI) driver for PDO | Wez Furlong |
| pcntl | Jason Greene, Arnaud Le Blanc |
| Perl Compatible Regexps | Andrei Zmievski |
| PHP Archive | Gregory Beaver, Marcus Boerger |
| PHP Data Objects | Wez Furlong, Marcus Boerger, Sterling Hughes, George Schlossnagle, Ilia Alshanetsky |
| PHP hash | Sara Golemon, Rasmus Lerdorf, Stefan Esser, Michael Wallner, Scott MacVicar |
| Posix | Kristian Koehntopp |
| PostgreSQL driver for PDO | Edin Kadribasic, Ilia Alshanetsky |
| PostgreSQL | Jouni Ahto, Zeev Suraski, Yasuo Ohgaki, Chris Kings-Lynne |
| Pspell | Vlad Krupin |
| Readline | Thies C. Arntzen |
| Reflection | Marcus Boerger, Timm Friebe, George Schlossnagle, Andrei Zmievski, Johannes Schlueter |
| Sessions | Sascha Schumann, Andrei Zmievski |
| Shared Memory Operations | Slava Poliakov, Ilia Alshanetsky |
| SimpleXML | Sterling Hughes, Marcus Boerger, Rob Richards |
| SNMP | Rasmus Lerdorf, Harrie Hazewinkel, Mike Jackson, Steven Lawrance, Johann Hanne, Boris Lytochkin |
| SOAP | Brad Lafountain, Shane Caraveo, Dmitry Stogov |
| Sockets | Chris Vandomelen, Sterling Hughes, Daniel Beulshausen, Jason Greene |
| Sodium | Frank Denis |
| SPL | Marcus Boerger, Etienne Kneuss |
| SQLite 3.x driver for PDO | Wez Furlong |
| SQLite3 | Scott MacVicar, Ilia Alshanetsky, Brad Dewar |
| System V Message based IPC | Wez Furlong |
| System V Semaphores | Tom May |
| System V Shared Memory | Christian Cartus |
| tidy | John Coggeshall, Ilia Alshanetsky |
| tokenizer | Andrei Zmievski, Johannes Schlueter |
| XML | Stig Bakken, Thies C. Arntzen, Sterling Hughes |
| XMLReader | Rob Richards |
| XMLWriter | Rob Richards, Pierre-Alain Joye |
| XSL | Christian Stocker, Rob Richards |
| Zip | Pierre-Alain Joye, Remi Collet |
| Zlib | Rasmus Lerdorf, Stefan Roehrich, Zeev Suraski, Jade Nicoletti, Michael Wallner |
| PHP Documentation | |
|---|---|
| Authors | Mehdi Achour, Friedhelm Betz, Antony Dovgal, Nuno Lopes, Hannes Magnusson, Philip Olson, Georg Richter, Damien Seguy, Jakub Vrana, Adam Harvey |
| Editor | Peter Cowburn |
| User Note Maintainers | Daniel P. Brown, Thiago Henrique Pojda |
| Other Contributors | Previously active authors, editors and other contributors are listed in the manual. |
| PHP Quality Assurance Team |
|---|
| Ilia Alshanetsky, Joerg Behrens, Antony Dovgal, Stefan Esser, Moriyoshi Koizumi, Magnus Maatta, Sebastian Nohn, Derick Rethans, Melvyn Sopacua, Pierre-Alain Joye, Dmitry Stogov, Felipe Pena, David Soria Parra, Stanislav Malyshev, Julien Pauli, Stephen Zarkos, Anatol Belski, Remi Collet, Ferenc Kovacs |
| Websites and Infrastructure team | |
|---|---|
| PHP Websites Team | Rasmus Lerdorf, Hannes Magnusson, Philip Olson, Lukas Kahwe Smith, Pierre-Alain Joye, Kalle Sommer Nielsen, Peter Cowburn, Adam Harvey, Ferenc Kovacs, Levi Morrison |
| Event Maintainers | Damien Seguy, Daniel P. Brown |
| Network Infrastructure | Daniel P. Brown |
| Windows Infrastructure | Alex Schoenmaker |
| Debian Packaging |
|---|
| DEB.SURY.ORG, an OndĹej SurĂ˝ project |
PHP License
|
This program is free software; you can redistribute it and/or modify it under the terms of the PHP License as published by the PHP Group and included in the distribution in the file: LICENSE This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. If you did not receive a copy of the PHP license, or have any questions about PHP licensing, please contact license@php.net. |
Poradňa
Na tejto stránke nájdete odpovede od našich odborníkov na najčastejšie otázky, ktoré nám v súvislosti so súťažou posielate. Odpovede na technické otázky možno nájdete aj na niektorej z mnohých robotických stránok na internete, ktorá sa zaoberá podobnou problematikou. Tie najzaujímavejšie sme pre vás zozbierali na samostatnej stránke Odkazy.
Obsah
- Prečo ISTROBOT?
Latinský názov Bratislavy je Istropolis, preto Istro + robot. Okrem toho je to jediná takáto súťaž v bývalých "East European" krajinách, takže tiež Eastrobot [ístrobot]. Nesprávny názov súťaže je IstroRObot a nesprávna výslovnosť je [istrobu:t].
- Robota asi nesthnem dokončiť, preto radšej neprídem.
Ja by som na Vašom mieste nehádzal hneď flintu do žita. Aj vlani prišiel jeden účastník, ktorý napokon ani neodštartoval. Podstatné je prísť a skúsiť. Ak máte konštrukciu hotovú, potom neverím, že by ste niečo nedoprogramovali.
Deň pred súťažou bude dráha k dispozícii na testovanie, takže ak by ste prišli na dva dni, možno by sa ešte všeličo dalo odladiť. Nemusíte vyhrať, ale aspoň to skúsiť, aj keď budete posledný, svet sa nezrúti. Aspoň ale získate skúsenosti a na budúci rok vyhráte ;-)
- Potřebuji vědět, co vše je hrazeno a co vše si musím hradit sám.
Buďte tak laskav a toto mi sdělte.
Organizátori vám preplatia ubytovanie a prispejú na stravu. Po skúsenostiach z minulých ročníkov sme sa rozhodli nepreplácať cestovné.
- Môžem jedného robota prihlásiť do viacerých kategórií?
Áno, môžete.
- Budeme si môcť dráhu vyskúšať?
Áno, dráhy sú prístupné verejnosti. Nie je na nich ale súťažný tvar dráhy. Presný pravidelný termín býva uverejnený na stránke.
Dráha bude okrem toho k dispozícii na testovanie deň pred súťažou, takže ak prídete na oba dni, možno ešte všeličo doladíte.
- Dá sa zabezpečiť nejaké lacné ubytovanie?
Áno, dokonca zadarmo (ale len pre súťažiacich, nie pre všetkých čo vás prídu povzbudzovať). Ak chcete prespať ešte aj noc po súťaži, musíte si to zaplatiť zo svojho vrecka. Ceny sa menia podľa toho, na ktorom intráku sa podarí vybaviť ubytovanie. Spýtajte sa mailom.
- Mohli by ste poslat nejaku oficialnu pozvanku na skolu, aby sme
sa mohli uvolnit z vyucovania kvoli testovaniu?
Hm. Ak vam staci papierova verzia toho co je na www.robotika.sk tak to mozem poslat, (napiste mi adresu kam), pripadne si sami nieco napiste, poslite mi to a ja tam dam peciatku a take nezmysly.
- Dá sa dohodnúť na termíne testovania?
Dá.
- Kolko ludi si mozme doniest do publika(viete ked vyhra zavisi od sily
potlesku)?
Kolko chcete, kapacita miestnosti je 300 ludi ;-)
-
V pravidlách Myši v bludisku je uvedené, že:
"Bludisko pozostáva zo siete (max. 16 × 16) základných štvorcov s
rozmermi 18 × 18 cm.", ďalej je uvedené
"Chodbičky sú teda široké 16,8 cm" (to je OK).
Ale v sekcii 'Robot - myš' v druhom odseku je uvedené:
"Dĺžka a šírka myši nesmie prekročiť 25 cm. Ak myš mení počas činnosti
svoje rozmery, v žiadnom okamihu nesmie prekročiť 25×25 cm."
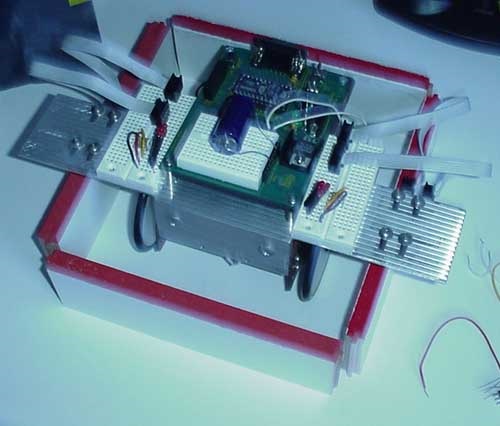
Nerozumiem tomu, ako sa robot s rozmermi 25 x 25 zmestí na políčko
16,8 x 16,8. Alebo ako prejde 25 cm široký robot cez 16,8 cm širokú
cestičku.
Nechce sa mi to prezrádzať, ale keď to už toľkým vŕta v hlave -- jeden obrázok je lepší ako sto slov -- takto:

Ak nahodou obrazok zmizol, kliknite si sem.
- Bude svietit priame slnecne svetlo na drahu?
Pravidlá takúto situáciu nevylučujú. Ale keďže súťaž sa bude konať v posluchárni, ktorá je dosť tmavá a počítame aj s premietaním na veľkoplošnú obrazovku, zrejme do miestnosti veľa slnka neprenikne.
- Dale v popisu trati uvadite, ze se budou vyskytovat ruzne
prekazky, zajima me, jake ruzne prekazky a hlavne s jakym povrchem,
jake barvy a materialu. Dale preruseni drahy bude na jakou vzdalenost
a zda druhy konec preruseni bude v ose prvniho preruseni.
To už by som Vám mohol rovno nakresliť súťažnú dráhu ;-)
Dráha však nebude príliš odlišná od minulého ročníka (na stránke je jej obrázok). Prekážku si predstavte ako tehlu (cihlu), alebo drevený špalík.
Farba a rozmery sa môžu líšiť, takže sa na ne nespoliehajte. O tom je práve súťaž, že neviete celkom všetko a robot sa tomu musí prispôsobiť...
- Co sa povazuje za nakladny robot?
To posudi porota. Nie je to ktovieaka definicia, ale musi vam stacit. Ak by sme dali napriklad cenove obmedzenie, tazko by sa dokazovalo. Toto pravidlo je urcene hlavne pre tych, ktori mozu vyuzivat relativne neobmedzene zdroje. Napriklad ak niekto pracuje (alebo brigaduje) v pocitacovej firme, nie je problem "pozicat" si trebars aj priemyselnu kameru a jednodoskovy priemyselny pocitac. Takym ludom by mali porotcovia "dohovorit" aby radsej robota predviedli vo Volnej jazde.
Aj preto je dobre, aby ste mi cim skorej zacali posielat nejake popisy, nakresy a fotky robotov, aby sme pripadne nejasnosti vyriesili cim skorej, nie az na sutazi.
- moze byt riadeny vstavanou 486 (teda taka 486 na kolieskach)
Ano, moze. Ak to nie je nahodou priemyselna verzia, pripadne DIMM PC verzia, lebo to by asi spadalo do tej kategorie "prilis nakladny". Kde by ste na to asi vzali?
- Co znamena pojem tehla na drahe (max rozmery, vaha, material)?
- Môžu byť v tuneli zatáčky?
Prečo nie, dobrý nápad.
- Aké sú rozmery tunelov?
A čo vlastne bude robiť váš robot? ;-)
- Moze si robot v kategorii pathfollower pri prvom a dalsom pokuse
zapamatat doteraz prejdenu drahu (teda, ci je mozne trasu najprv prejst
pomalicky a poznacit si vsetky prekazky, a potom pri druhom pokuse len tak
preletiet)? lebo to nie je v rozpore s pravidlami na stranke
Ano, moze. Dokonca je to tam vyslovne uvedene.
- Odrazaju prekazky na drahe ultrazvuky?
Ano.
- Ake su podmienky na prerusene miesto?
Ziadne. Akurat ze nebude prilis dlhe. Pozrite si dráhy z minulých ročníkov.
- K tej volnej jazde, naozaj vitazstvo zavisi iba od sily potlesku?
Áno. Presnejšie povedané (po skúsenostiach s "meraním") na základe sily potlesku vyhodnoteného porotou.
- Robot sutaziaci v kategorii volna jazda musi mat tiez maximalne rozmery
25x25x25 cm ? V ramci volnej jazdy moze byt dialkovo riadeny ?
Nie. Ano.
- Mozem sa viacerych rocnikov sutaze zucasnit s tym istym robotom ?
Ano.
- Moze robot opustit nahodou (napr. chyba senzorov) na moment drahu a
hned ju najst a pokracovat v kole, alebo bude diskvalifikovany.
Zrejme ano, zalezi co povie porota.
- Co vsetko na trati sa da poskodit ? Vydrzia tehlicky aj naraz maleho
"buldozera" ?
Zoberte niekde normalnu tehlu a skuste.
- Aka podrobna ma byt dokumentacia?
Dost.
- Pred prekazkou je, alebo nie je prerusena ciara ?
Nie je.
- Cas medzi pokusmi mozem pouzit aj na manualne naprogramovanie prip.
upravenie uz zaznamenanej drahy (robotom)?
V ziadnom pripade!
- Kedy je mozne otestovat drahu a je mozne v mieste testovania pozicanie
PC monitora?
Ked sa dohodneme, najblizsi termin je uvedeny v Novinkach. Monitor sa da pozicat.
- Moze sa stat, ked nas robot bude napr. 24 cm siroky a pri jazde po
rovnej ciare ma mozny rozkmit 2 cm do stran, ze neprejde tunelom, resp. ze
ho poskodi a bude diskvalifikovany ?
Nebude az taky maly...
- Pred tunelmi bude rovna draha, alebo moze byt tunel na zakrute ?
Nechajte sa prekvapit.
- Kto bude v publiku ?
Vselikto. Koho si privediete.
- Moze byt na trati viacej robotov naraz?
Kde by sa tam vzali?
- Ak ano mozme im skodit?
Ak nahodou ano, tak mozete.
- Ake su toho roku ceny?
Dobre ;-)
- Jaky tvar bude mit začátek závodní dráhy?
V pravidlech na www je cosi o kruhu ze kterého robot vyjíždí,
ale na fotkách z loňského roku je jen čára, která prostě začne.
Jaký start tedy bude letos?
Štart je vzdy rovnaky. Ten kruh tam nemoze byt namalovany plnou ciarou, lebo robot by samozrejme chytil "stopu" a jazdil dokola. Preto je ten kruh mysleny. V skutocnosti je vyznaceny slabou ceruzkou, takze na fotke ho nie je vidno.
- Bude možno robota postavit přímo na čáru, nebo musí
být "vypuštěn" na bílé ploše a musí si čáru najít?
Idealny start vyzera tak, ze ho umiestnite do toho pomysleneho kruhu, napriklad kolmo k ciare, on si ju najde a pusti sa po nej. Ale porota vlani nemala namietky ani voci priamemu postaveniu na ciaru. Kedze sa tam este nemeria cas, nie je to az take podstatne.
Asi vas niektore odpovede neuspokojili, ale o tom je sutaz, ze robot sa musi aj trocha samostatne rozhodovat. Ak by ste vedeli rozmery prekazok, tunelov atd. tak mozete vsetko vopred naprogramovat a uz to nie je autonomny robot. Takze sa nechajte prekvapit.
Richard Balogh
- Nemame celkom jasno v oblasti IR snimacov, chceli by sme ich
pouzit na sledovanie drahy, a nevieme aky pocet tychto snimacov je
potrebne pouzit, a ako ich vhodne vzajomne umiestnit.
To, aky pocet snimacou pouzijete je vasa vec. Potrebujete aspon dva, aby ste mohli sledovat odchylku vlavo, vpravo. Niektori pouzivaju rad (6-8) snimacov a maju presnejsiu informaciu - skratka to musite vymysliet, o tom je prave sutaz.
Podrobnejšie odpovedá Ing. Juraj Gacho:
No, co sa tyka drahy, bude to cierna ciara na bielom podklade. Ked na tu drahu niecim zasvietite, tak z toho cierneho povrchu sa bude odrazat menej svetla ako z bieleho - a to sa vlastne bude vyuzivat. V minulom rocniku mali vsetky zucastnene roboty (aspon myslim) pouzite 2 snimace, jeden z nich sledoval ciaru a jeden bielu podlahu vedla ciary. Z toho vyplyval aj algoritmus riadenia, kedy cielom riadenia bolo chodit tak, aby jeden snimac isiel ponad biele pasmo (podlahu) a jeden ponad cierne pasmo (ciaru). Daju sa pouzit fototranzistory, fotodiody alebo fotorezistory, alebo je mozne pouzit aj integrovane snimace-zvacsa IR. (v principe je jedno, ci robite s viditelnym svetlom, alebo infracervenym). Je vhodne zabezpecit, aby bocne svetlo nesposobovalo problemy (nejako odtienit snimace a mat vlastne osvetlenie. Ak nieco o takychto snimacoch viete, tak vam odporucam pozriet na internete nejake katalogove listy, alebo skocit niekde do obchodu so suciastkami a porozpravat sa s predavacom, alebo mozete skocit za niekym na fakulte, kto sa tym zaobera. Mozno by ste nieco nasli aj v casopise AT&P Journal, kde uz viac ako rok bezi serial Senzory v automatizacii (autor - Miroslav Toman). Niekde v kniznici by ste to hadam nasli.
Co sa poctu tyka, je potrebne, aby ste vedeli kde je ciara a ked ciaru stratite, tak aby ste vedeli, ze sa nachadzate napr. vlavo alebo vpravo od ciary. Najjednoduchsie je riesenie s dvomi snimacmi, ako som uz popisal hore. Ale tieto by nemali byt od seba vzdialene viac ako je sirka ciary, aby sa nestalo, ze obidvomi snimacmi idete ponad bielu podlahu a nebudete vediet, kde je ciara, ked bude medzi snimacmi. Ale mozete mat samozrejme aj viac snimacov a potom budete vediet, ako daleko je ciara napr. od stredu robota...
- Je vhodne na detekciu prekazky pouzit IR snimac, alebo dotykovy
snimac? Nestrati robot pri detekcii prekazky pri pouziti dotykoveho
snimaca viac casu tym, ze musi prist az k nej a dotknut sa jej?
V pripade pouzitia IR snimaca by robot prekazku zaregistroval skor a tiez
by ju mohol zacat skor obchadzat?
Samozrejme, ze pri pouziti bezdotykoveh snimaca (napr IR) vyzera aj spravanie sa robota "inteligentnejsie", ale dotykovy snimac je jednoduchsi. Je pravda aj to, ze ked prekazku zaregistruje skor, moze ju obist s mensou casovou stratou. No mozno sa hodi pouzit kombinaciu - aj IR aj dotykovy snimac na prekazku.
Tuto uvahu musite vyriesit sami. Mate teda pravdu, ze IR by mohlo byt lepsie, zalezi vsak velmi aj na algoritme obchadzania.
- Bolo by mozne zvysit rychlost pohybu robota pouzitim vacsieho
napajania krokovych motorcekov (z disketovej mechaniky)?
Nie. Od velkosti napatia (prudu) zavisi moment krokoveho motora (KM), ale rychlost KM v ustalenom stave zavisi od frekvencie impulzov. Zvacsenim napajania je mozne docielit, ako som uz spominal, vacsi moment a teda aj lepsie zrychlenie, ale na druhej strane sa zvysi spotreba.
Ale musim vas upozornit, ze krokace maju iste fyzikalne obmedzenia a tak ani frekvenciu nemozete zvysovat lubovolne. Od istej hodnoty motor tzv. vypadava, t.j. nestiha reagovat na vsetky impulzy, teda "straca krok".
- Musime si zakladnu dosku, do ktorej osadime mikropocitac vyrobit
sami, alebo pravidla povoluju pouzitie kupenej dosky?
Mozete si kupit skoro vsetko, vylucene je len kupit celeho robota hotoveho. Su (na zapade) aj take stavebnice....
V sutazi ide najma o pouzity algoritmus (teda riadiaci program) a vhodnu volbu snimacov.
-
Stavam robotka na tu sutaz mobilnych robotov a mam taky napad pohanat ho
nie krokovymi motormi, ale jednosmernymi motormi( z teslackych magnetofonov).
Celkom vy to islo, prevod by som mal porieseny, ale neviem ako sa to da riadit.
Mam pouzit krokove motory, alebo mozem aj tie jednosmerne?
A ako sa daju riadit jednosmerne motory?
S jednosmernými motormi môžu byť isté problémy, pretože ich rýchlosť v ustálenom stave (teda v stave kedy sa už rýchlosť nemení) závisí okrem vstupného napätia aj od zaťaženia. V dynamickom režime (teda pri rozbiehaní a brzdení) závisí priebeh rýchlosti tiež napr. od hmotnosti robota. Keďže hmotnosť robota ani zaťaženie motora nevieme vhodne ovplyvňovať, môžeme motor riadiť zmenou napájacieho napätia.
Použitie jednosmerných motorov na pohon robota závisí do istej miery aj od koncepcie podvozku robota. Ak má byť robot poháňaný tak, že sa vyžaduje, aby boli rýchlosti rôznych motorov v želanom pomere, (napr. by boli poháňané 2 kolesá každé vlastným motorom, smer zatáčania robota by bol potom odvodený od vzájomného pomeru rýchlostí jdnotlivých motorov), použitie jednosmerných motorov by som neodporúčal, lebo by boli potrebné snímače rýchlostí a dostatočne rýchle regulátory obidvoch motorov. V tomto prípade je použitie krokových motorov omnoho jednoduchšie.
Ak by však bol na pohon robota použitý iba jeden motor a zatáčanie robota by bolo riešené nejako inak, potom by sa dal jednosmerný motor použiť napr. tak, že by sa vstupným napätím nastavila vhodná rýchlosť. Keďže by sa zaťaženie motora počas jazdy menilo iba minimálne (nerovnosti na trati), otáčky motora by sa tiež menili iba v malom rozsahu.
A ako zmeniť napájacie napätie motora? Najjednoduchším riešením je zapojiť vhodný odpor (potenciometer) do série s motorom. "Krajším" riešením je napájať motor šírkovo modulovaným napätím. Na generovanie riadiaceho signálu pre šírkovú moduláciu je možné využiť nejaký oscilátor, alebo riadiaci procesor, pokiaľ disponuje šírkovou moduláciou alebo pulzným generátorom. Riadiaci signál bude potom vstupom do spínacieho tranzistora, alebo, ak je potrebná reverzácia otáčok motora, do H-mostu, cez ktorý bude motor napájaný.
Na záver: Ak sa rozhodnete použiť jednosmerné motory namiesto krokových, zvolili ste si náročnejšiu, nie však neschodnú cestu. Začiatočníkom by som však odporučil použiť krokové motory.
Juraj Gacho <gacho@nov1.kar.elf.stuba.sk>
Organizačné problémy
{kind=link}
{kind=link}
Hľadáme odpovede:
- Kde by som našiel schémy zapojení robotov do súťaže?